







一盒用户急需的药品由无人机配送到小区中,一键下单10分钟热气腾腾的外卖随着无人机送到家门口……这不是科幻作品中才有的景象,而是已经实现的场景。但在实际应用中,无人机配送还存在着预估位移不准确、着陆偏差过大等问题。
来自北京航空航天大学的Li Daochun科研团队提出了一个基于多传感器融合的无人机自主着陆方案。该方案包含一个融合传感器系统:由UWB(超宽带)、IMU(惯性测量单元)和视觉传感器组成,以引导无人机接近和降落在移动物体上。
拟议的无人机自主着陆方案的工作流程分为两个阶段:接近阶段和着陆阶段。在接近阶段,无人机离着陆平台较远,无法获取准确的视觉信息进行姿态估计,因此无人机主要依靠UWB-IMU融合定位系统获得与地面移动平台之间的相对位置。当无人机接近着陆平台并捕捉到视觉信息时,无人机会根据视觉信息和UWB-IMU定位系统提供的数据进入着陆阶段。
为了准确评估无人机的相对方向,团队设计了一个由五个不同大小的独立ArUco标记组成的新地标,如图一所示,这样的设计可以用于无人机的相对姿态估计和在不同高度的有效识别。当整个地标在相机的视场范围内时,使用四个外部标记进行相对姿态估计。当无人机接近地标时,外侧的标记在相机视场中不可见,而中间的标记可以继续引导无人机下降并降落在移动平台上。
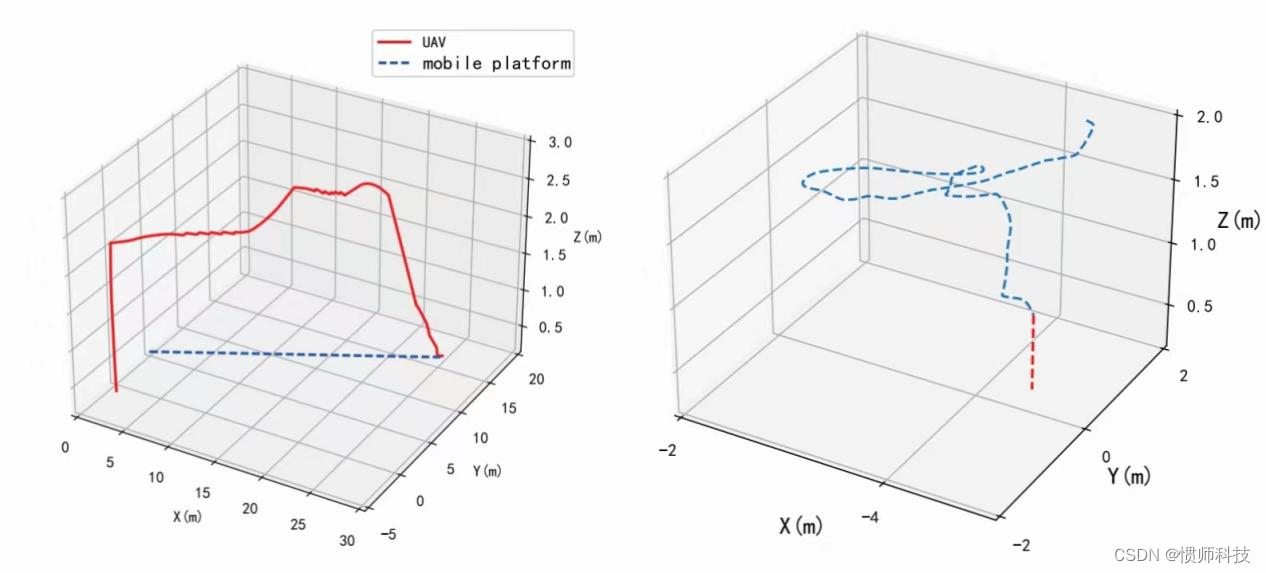
图一 左图为模拟测试中无人机和移动平台的运动轨迹 右图为现实世界实验中无人机自主着陆轨迹
为了验证方案的可行性,团队先在计算机上进行了模拟测试,然后再在现实世界中进行了实验。结果表明,该方案可以在大多数常见场景中让无人机以足够的精度成功自主着陆。
在Gazebo模拟器中的自主着陆模拟测试的降落轨迹如图一左图所示,可以看出,无人机在很短的时间内消除了位置误差,持续跟踪移动平台并成功下降。
在室外现实世界的实验中无人机的运行轨迹如图一右图所示,蓝色虚线表示无人机在降落过程中由方案中的方法引导的飞行轨迹,红线是无人机达到给定阈值时逐渐停止螺旋桨并降落在降落台的轨迹。实验结果表明,UWB-IMU-Vision框架可以引导无人机降落在所需的平台上,能够自主完成着陆任务,着陆误差在10cm以内,表现出了良好的精确性和可靠性。
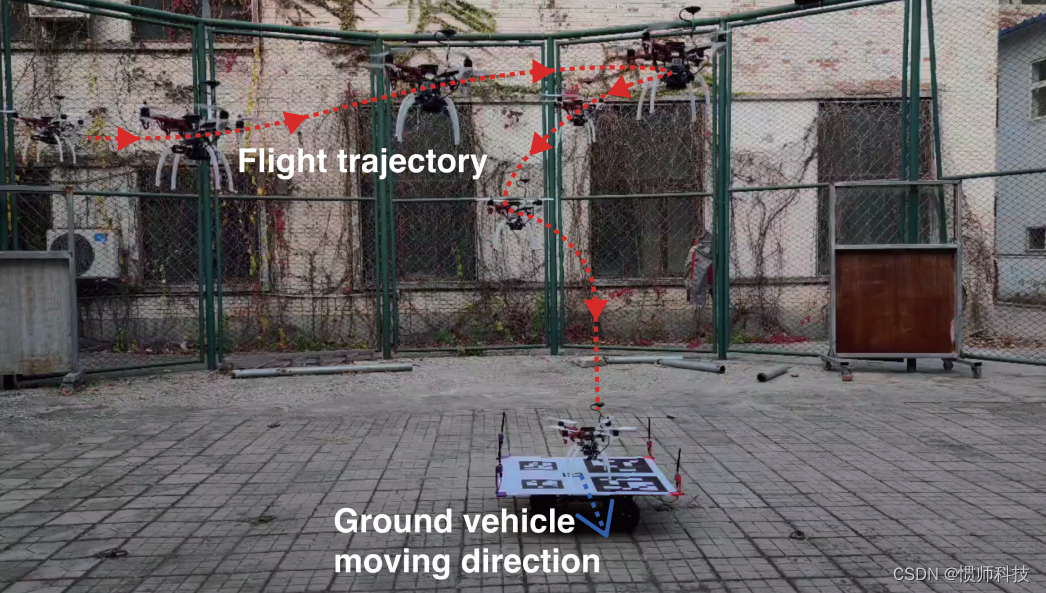
图二 现实世界中实验的自主着陆过程
技术发展和商业机遇往往会成为颠覆现有商业理念或商业模式的一个未知因素,目前无人机的大规模推广仍然存在很大的场景落地难度,无人机配送目前大多还在偏远地区实行,想要在城市内投入使用还需要政策的进一步开放和众多技术问题的解决。
【Dong, Xin, et al. "An Integrated UWB-IMU-Vision Framework for Autonomous Approaching and Landing of UAVs." Aerospace 9.12 (2022): 797.】















 1722
1722











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









