







 本文介绍了严恭敏等人关于利用Allan方差分析识别陀螺仪漂移误差的研究。通过对实测数据的Allan方差分析,提出了新的曲线拟合方法,以识别不同噪声类型和参数。通过Matlab程序实现Allan方差拟合,验证了方法的有效性,并展示了漂移误差的仿真复现,为陀螺仪精度提升提供了理论支持。
本文介绍了严恭敏等人关于利用Allan方差分析识别陀螺仪漂移误差的研究。通过对实测数据的Allan方差分析,提出了新的曲线拟合方法,以识别不同噪声类型和参数。通过Matlab程序实现Allan方差拟合,验证了方法的有效性,并展示了漂移误差的仿真复现,为陀螺仪精度提升提供了理论支持。
本博文主要对严恭敏老师在导航定位学报中发表的一篇论文进行简要整理,参考文献如下:
严恭敏,李梓阳,朱宏堡.基于Allan 方差分析的陀螺仪漂移误差辨识与仿真复现[J/OL].导航定位学报.
https://kns.cnki.net/kcms/detail/10.1096.P.20220311.1802.002.html
基于Allan方差分析的陀螺仪漂移误差辨识与仿真复现
摘要
文章针对传统阿伦(Allan)方差分析法中容易引起误差类型错误识别的问题,提出了一种新的Allan方差曲线拟合方法。对一组实测的陀螺仪数据进行了Allan 方差分析,求得它的漂移误差类型和相应的噪声参数,基于噪声参数进行了虚拟陀螺仪漂移的仿真复现,复现数据的误差特征与实测数据吻合,验证了Allan 方差分析方法的正确性。
引言
1.陀螺仪漂移的随机误差分析一般是指对陀螺仪输出的静态漂移数据进行建模分析,分离出其中包含的误差成分并辨识出各种误差参数。Allan 方差分析法具有噪声类型识别丰富、参数估计简单且计算量小等突出优点。
2.理论上,Allan 方差分析获得的最长相关时间(簇时间或分组时间,cluster time)为采样序列总时间长度的1/2,一般认为当相关时间小于1/10 时具有较高的方差计算置信度。
3.对于低、中等级甚至惯性级陀螺仪漂移分析而言,其相关时间一般从数秒到上千秒,仅需采集3~5 h 以上的数据作Allan 方差分析即可,陀螺仪数据容易采集,所以对各种改进方法的需求并不迫切,通过简单地增加测试时间长度即可解决复杂的改进算法中的所谓提高估计置信度问题
4.无需过分精确的Allan方差测试建模,仅需简单粗略的陀螺仪漂移误差建模即可,不论是简单粗略还是复杂精细建模,对实用的陀螺仪漂移性能评估和导航误差预测准确性的提升区别都不大
Allan 方差分析基本原理
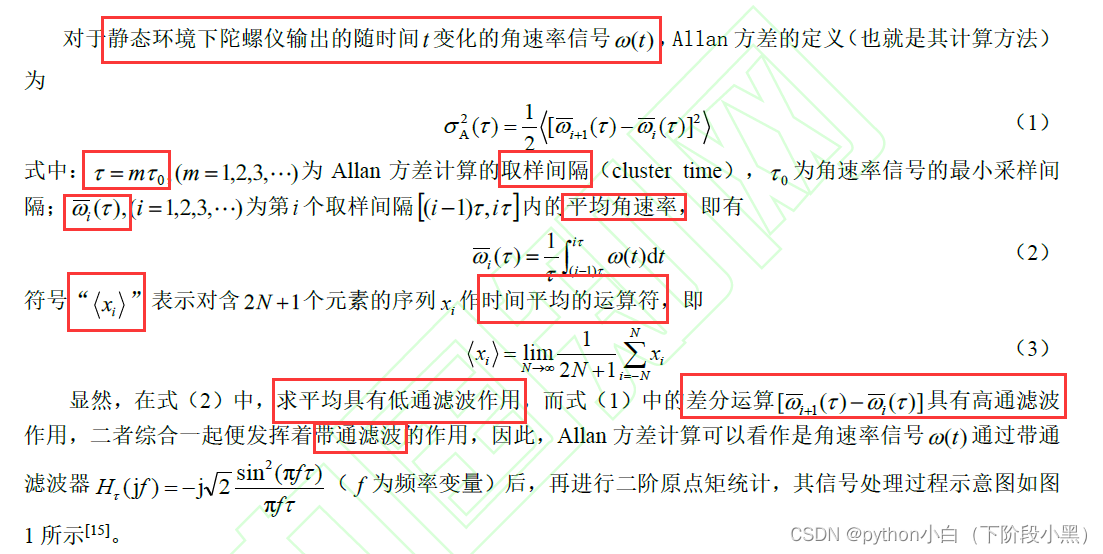
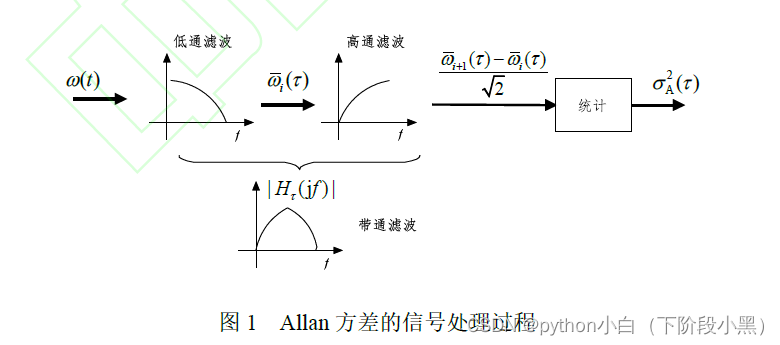

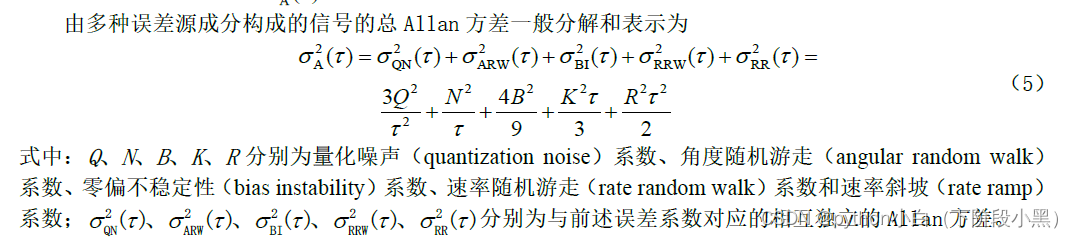
陀螺仪漂移误差往往是一系列相互独立的基本随机误差信号之和,常见的误差包括角度量化噪声、角度随机游走、零偏不稳定性、角速率随机游走等,它们在频域功率谱上表现的频段一般各不相同,经过Allan方差计算后,在相关时间—Allan 标准差双对数曲线图上表现的相关时间段和曲线斜率也各不相同,因此,根据 双对数曲线能够辨识出不同的噪声类型及其参数。
Allan 方差曲线拟合与参数估计
严老师编写了一个Allan方差曲线拟合程序avarfit.m,调用的顺序是:
先使用avarsimu进行陀螺Allan方差噪声的仿真,接着使用avar计算Allan方差,然后使用avarfit进行陀螺Allan方差拟合:
严老师文章中的举例如下
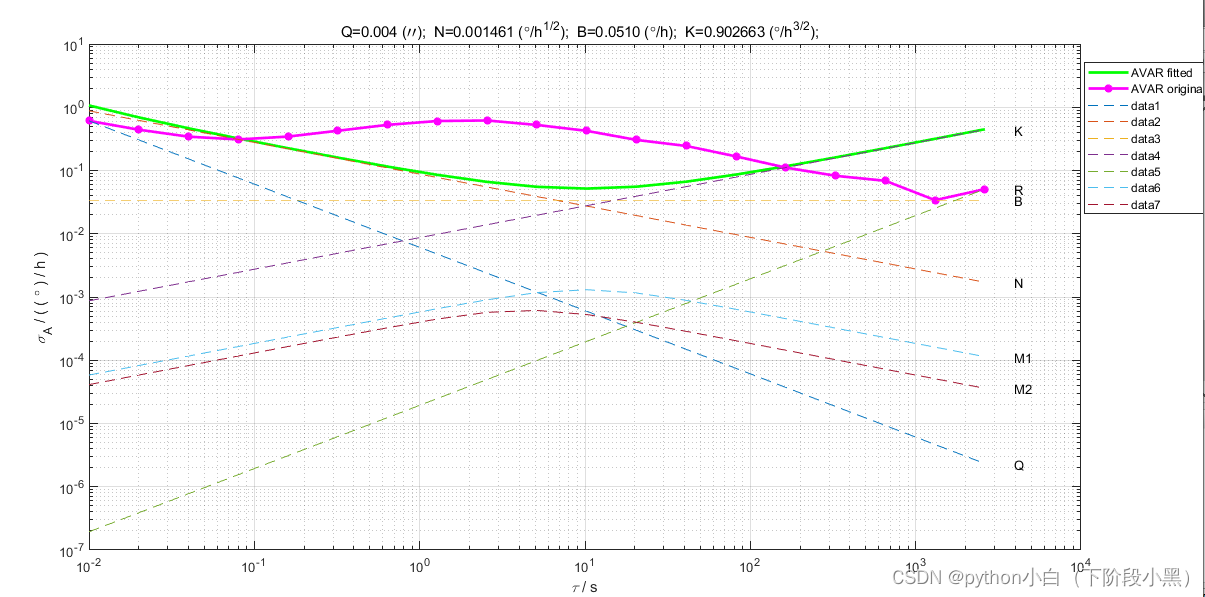
基于Matlab 的m 编程语言,论文中开发了Allan 方差曲线拟合程序(avarfit.m),运行程序后,仅需靠鼠标拖动即可完成曲线拟合并输出误差参数结果,操作非常直观方便,图形化界面如图3 所示。程序中预设了角度量化噪声(斜率-1、图中标注Q)、角度随机游(-1/2,N)、零偏不稳定性(0,B)、角速率随机游走(1/2,K)和速率斜坡(1,R)5 种基本误差,它们均为直线;还设置了2 个马尔可夫过程基本误差,分别标注为1 M 和2 M ,马尔可夫过程为中间上凸的“^”型线。当然,如果有必要还可通过修改程序增加更多的马尔可夫过程基本误差,以满足更复杂的需求。
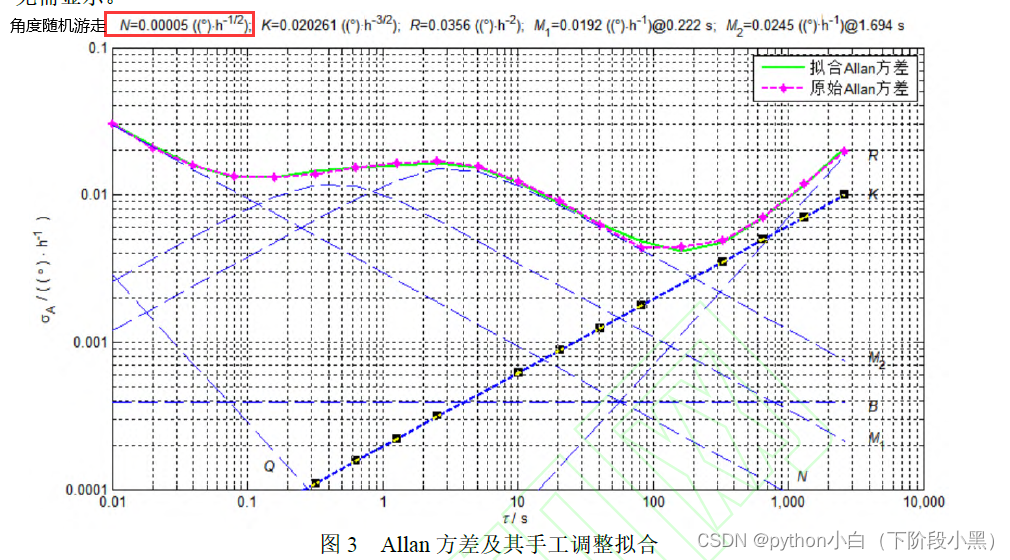
在图3 中,拟合的Allan 方差为粗实线“拟合Allan 方差”,它是上述所有7 个基本误差之和。使用鼠标选中某条基本误差曲线,比如图中粗虚直线K 正处于被选中的状态,拖动基本曲线可使其上下移动,相应地,拟合的“拟合Allan 方差”曲线的局部也会跟随之上下移动。经过所有基本曲线必要的手工移动调整后,可使“拟合Allan 方差”曲线与“原始Allan 方差”曲线尽量重合,图3 中所示的“拟合Allan 方差”曲线已经是处于较好的调整状态下的结果。在拟合曲线的手工调整过程中,如果某条基本误差曲线的影响很小,可将它往下移到较下方位置,比如图3 中的Q 和B 曲线,这表示Allan 方差分析建模中不需要该误差类型,尽量减小基本误差类型的数目也是Allan 方差分析的一个最基本原则。
博主应用程序举例如下
使用如下语句仿真Allan方差噪声
y = avarsimu([0.001,0.05,0.01,.0], [1, 1], 0.01, 1000000, 1);
使用如下语句计算Allan方差和相关时间
[sigma,tau] = avar(y, 0.01);
使用如下语句进行拟合
avarfit(sigma, tau);
下面是拟合前的曲线
下面是拟合后曲线:
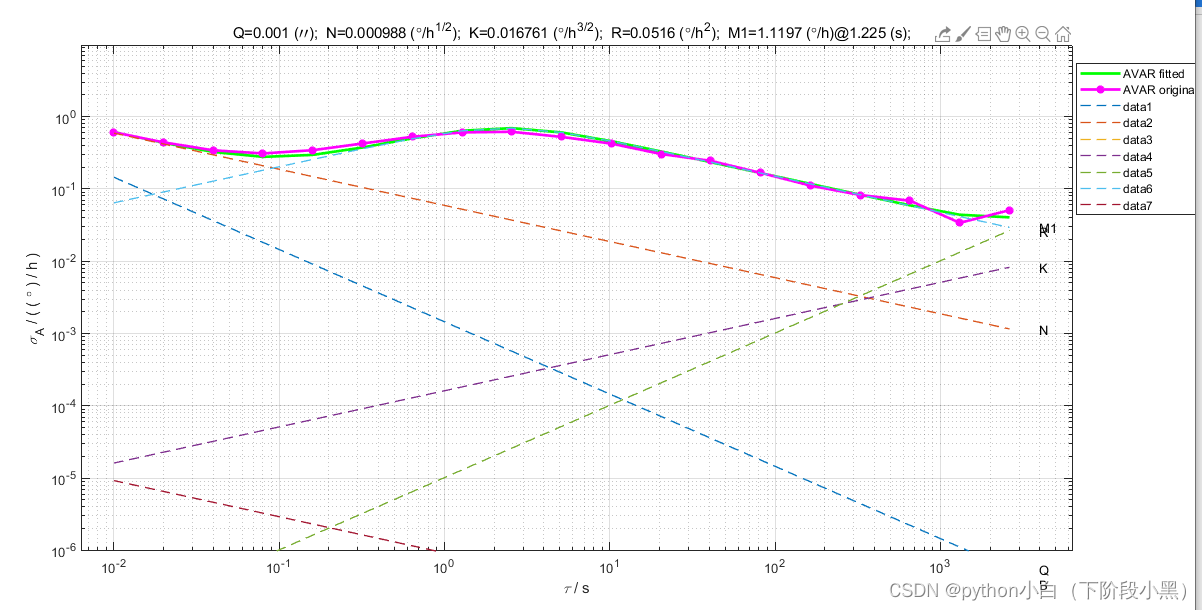
可以看出拟合效果不错
漂移误差的仿真复现与精度提升
漂移仿真复现
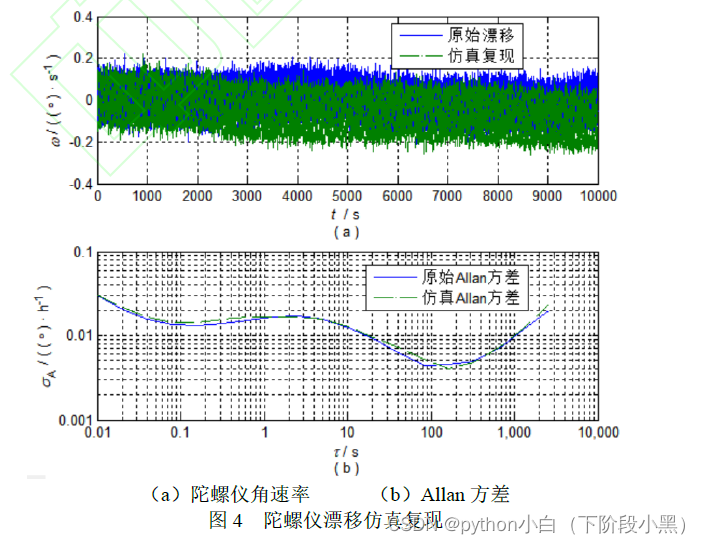
按照图3 辨识出的N、K、R、1M 和2M 参数仿真生成相互独立的角度随机游走、角速率随机游走、速率斜坡(按时域图2 其斜率应取-R)和2 个马尔可夫过程,共计5 个时间序列,再将它们相加,作为虚拟陀螺仪漂移的仿真复现。仿真复现漂移“仿真复现”虚线与真实陀螺仪漂移“原始漂移”实线,以及它们的Allan 方差曲线绘制如图4 所示。从图4 可以看出,两者的漂移角速率或Allan 方差曲线之间均有较好的吻合度,验证了前面Allan 曲线拟合方法和参数估计结果的合理性。
严老师文章中的举例如下
博主应用程序举例如下
根据我的拟合图中的参数,输入如下代码:
y1=avarsimu([0.000988,0.0516,0.016761,0.001], [1.1197, 1.725], 0.01, 1000000, 1);
可以看到仿真效果很不错
精度提升
严老师说:论文只是从漂移仿真复现的角度分析如何提升陀螺仪的精度。在实际陀螺仪中,应当针对物理传感器的误差源进行深入分析,找出其根源再做改进,才能真正地提高陀螺仪的精度。限于作者的研究专业方向(不专门从事陀螺仪开发研究),这里只能基于陀螺仪信号分析为实际陀螺仪的性能改进提供一些指导思路。
结束语
随机误差的Allan 方差分析方法广泛应用于陀螺仪漂移误差的建模辨识、陀螺仪性能改进和导航精度提升,目前国内外的研究主要集中于误差辨识,针对Allan 方差分析方法的改进也研究较多。其实无论是简单的分析方法还是复杂的改进分析方法,对导航精度的贡献都不会有明显的区别,陀螺仪漂移随机误差的统计特性即使可以精细描述,但是要实时进行精确补偿从而提高导航精度却是非常困难甚至是不可能的。论文给出的软件程序辅助Allan 方差误差辨识方法,容易获得主要的误差类型和误差参数。陀螺仪传感器研究人员更应该关注Allan 方差分析与传感器固有特性之间的联系,通过努力改进传感器从而提高其精度性能才是最终提升导航性能的根本所在。


















 3004
3004

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











