







Allan方差分析方法
根据Allan标准差曲线的形状识别主要随机误差类型,计
算随机误差的模型参数

1.上图中,横轴为时间尺度,纵轴为Allan方差的开方,称作Allan标准差也可以;出于图形表现力的考虑,为双对数曲线
2.白噪声为图中的斜率为-1/2的直线;一阶高斯马尔可夫过程由Correlated Noise 和 Sinusoidal处表现。Correlated Noise为一个小山包形状的曲线,如果信号里有一个周期性的东西,那么一定会 由Sinusoidal体现出来一个峰接着一个峰的序列,就说明是周期项;平坦的部分就是闪烁噪声,即零偏不稳定性;若存在发散的误差,就像随机游走一样,那么就表现在图中+1/2斜率的曲线;假设传感器有问题,传感器随着时间有一个零偏的线性发散,那么就有一个+1斜率的直线;若存在量化噪声,则体现出来的是一个斜率为-1的直线,但是就目前的传感器而言,这一部分会很少
Allan 方差– 误差模型识别案例
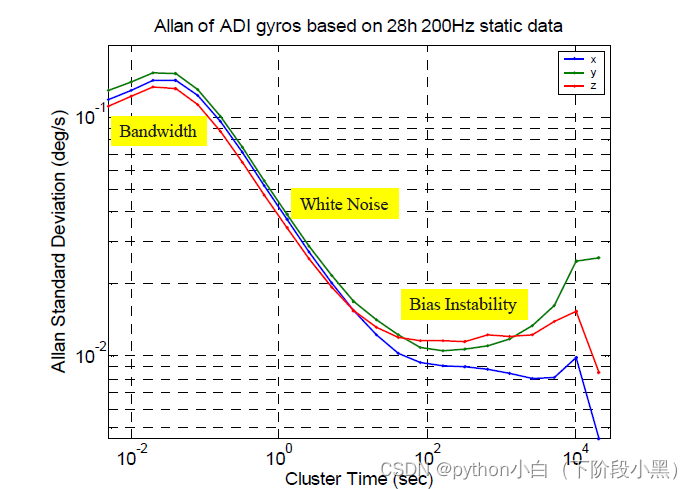
1.左边有一段曲线趋势下降(正常来说,若是有量化噪声的话,曲线应该往左边上升),越往左边越反应的是短时间高频的信息,由于测试时,输出的时候加了一个大的低通滤波,就把高频的部分衰减了,因此曲线就下降了
2.Allan方差在实际应用中只能看到主要矛盾,次要因素有可能看不到,这一点是可以的
测试与标定
测试
测试,是要测量指标,考察传感器的好坏
标定
对系统性误差/常值误差进行测量,然后再补偿
其它的测试与标定
测试内容
- 静态测试
- 转台测试
- 温度测试
- 磁敏感性
- 离心测试
- 冲击测试
- 振动测试
- 综合测试
- 老化和存贮测试
标定
- 零偏
- 比例因子
- 交轴耦合
- 温度漂移
- 加速度敏感性*(陀螺的额外的误差,陀螺应该只对角速度(角运动)敏感,但是它还对加速度(线速度)也敏感,这就是一个误差系数),可重复性的就可以补偿
- 上电过程(启动、预热)*
注意:只要系统误差/常值误差,标定(补偿)才有意义
经典描述
1.所有的系统误差都可以补偿。但是只考虑主要误差。一些随机误差可以通过导航算法估计并在线补偿。
2.校准是将仪器输出与已知参考信息进行比较,并确定使输出与参考信息一致的系数的过程输出值范围(Chatfield 1997)。
IMU的标定

1.初始横滚和俯仰角的确定是使用加速度计感知地球重力,因此零偏变小了,精度就会更高
2.陀螺零偏会影响初始航向的确定,因此零偏变小了,精度就会更高
3.根据公式可以解释具体影响
可用参考源
- 加速度计: 地球重力
- 陀螺仪: 地球自转或转台旋转
方法:
- 两位置、六位置法静态测试
- 角速率测试
所需设备:
- 转台
- 立方体


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











