







在机器人和人工智能结合的课题中,动力学仿真是一个重要的纽带。动力学仿真的意思,就是整个场景中的物体(包括桌子椅子或者机器人,夹爪),都能模拟物理世界一样表现,撞到了会停,会反弹。而动力学仿真中,gazebo,bullet,mujoco,都是一些做的比较成熟的(也有比如simulink,adams商业软件,但是其实商业软件并不适合linux下面的AI开发,他们都是自己一套体系,移植非常困难,只有linux下面的一些小伙伴可以形成组合拳)
mujoco有C++和PYTHON版本,两者也不是同一个东西(有一些细微区别,比如XML模型文件有的标签C++能认出来,PYTHON版本就不行)
先介绍C++版本,这个可以用来检查你自己写的XML文件是否正确,以及基础的调试
Mujoco
从官网下载新版,不要用2.0的版本了(mujoco-3.2.5-linux-x86_64.tar.gz)
https://github.com/google-deepmind/mujoco/releases
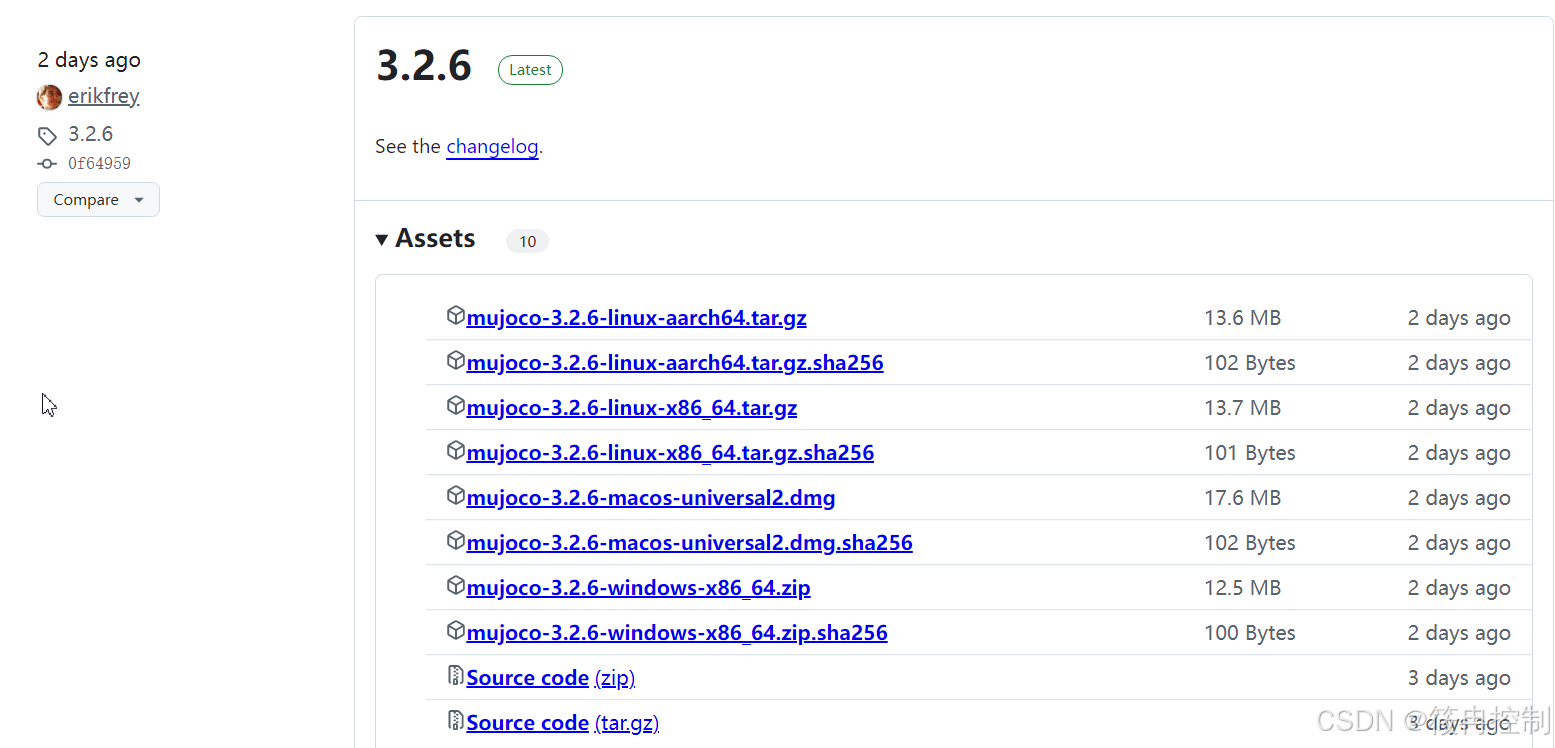
下载之后只需要解压,他这里有一个compile文件,是为了到时候转换得到xml模型格式文件
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 662
662

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











