







目录
一、简介
大家好,欢迎关注遨博学院带来的系列技术分享文章(协作机器人ROS开发),今天我们来学习一下“机械臂规划场景构建”。
二、环境版本
- 主机系统版本:Windwos10 64位
- 处理器型号:Intel-i7
- 虚拟机版本:VMware Workstation 16 Pro
- 虚拟机系统:Ubuntu 18.04.6 LTS
- ROS版本:Melodic
三、学习目标
四、知识储备
下面开始介绍本节内容的知识点:
1.PlanningScene类简介
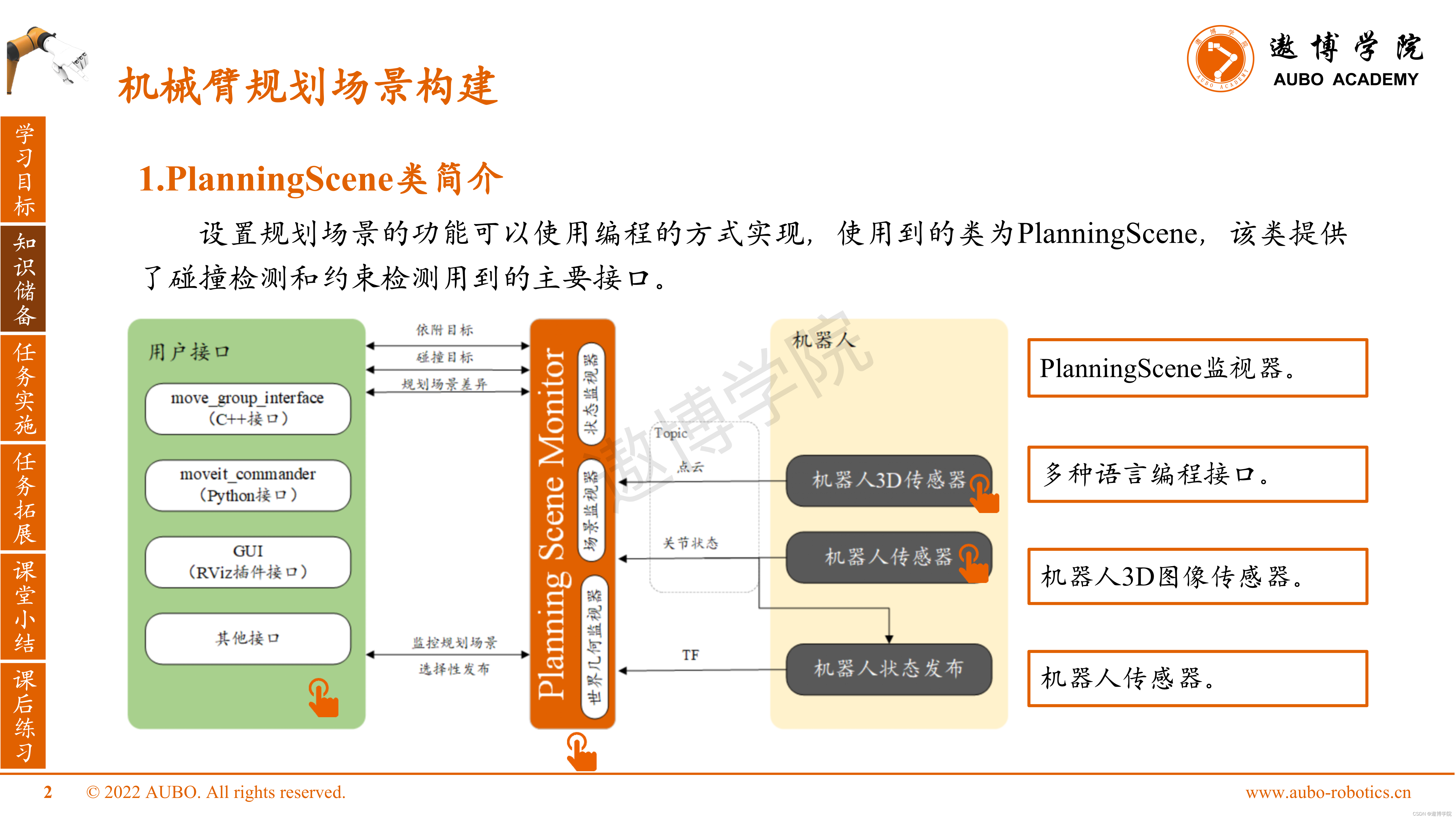
设置规划场景的功能可以使用编程的方式实现,使用到的类为PlanningScene,该类提供了碰撞检测和约束检测用到的主要接口。
在下图中表现了PlanningScene和各个组件之间的关系,首先核心是Planning Scene Monitor,也就是PlanningScene监视器,其支持多种语言的编程接口,可以通过这些编程接口构建规划场景,另外,也可以利用机器人的3D图像传感器与空间感知传感器的数据来构建规划场景。
 2.初始化PlanningScene类
2.初始化PlanningScene类
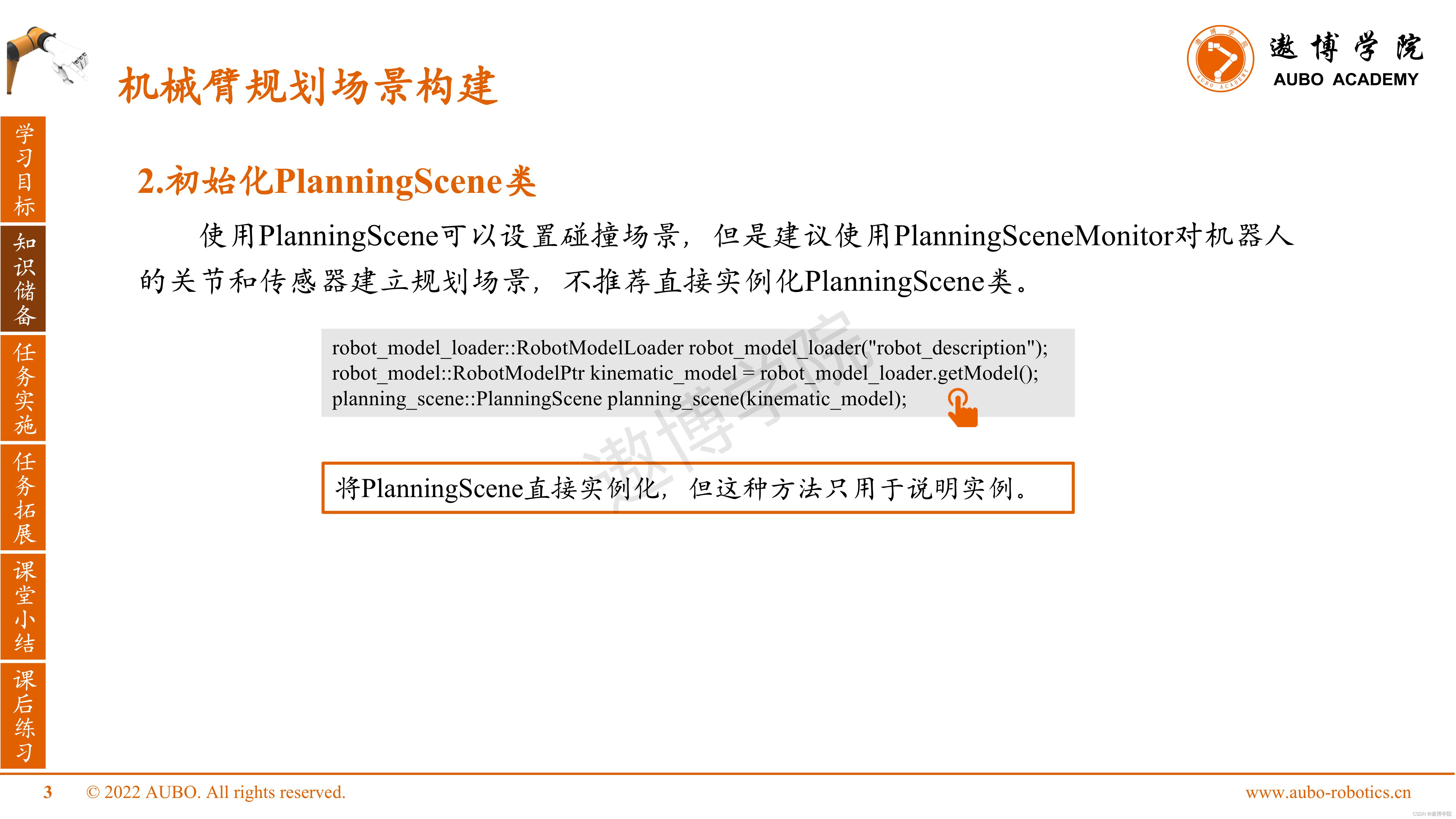
使用PlanningScene可以设置碰撞场景,但是建议使用PlanningSceneMonitor对机器人的关节和传感器建立规划场景,不推荐直接实例化PlanningScene类。
下列代码是将将PlanningScene直接实例化,但这种方法只用于说明实例。
3.碰撞检测
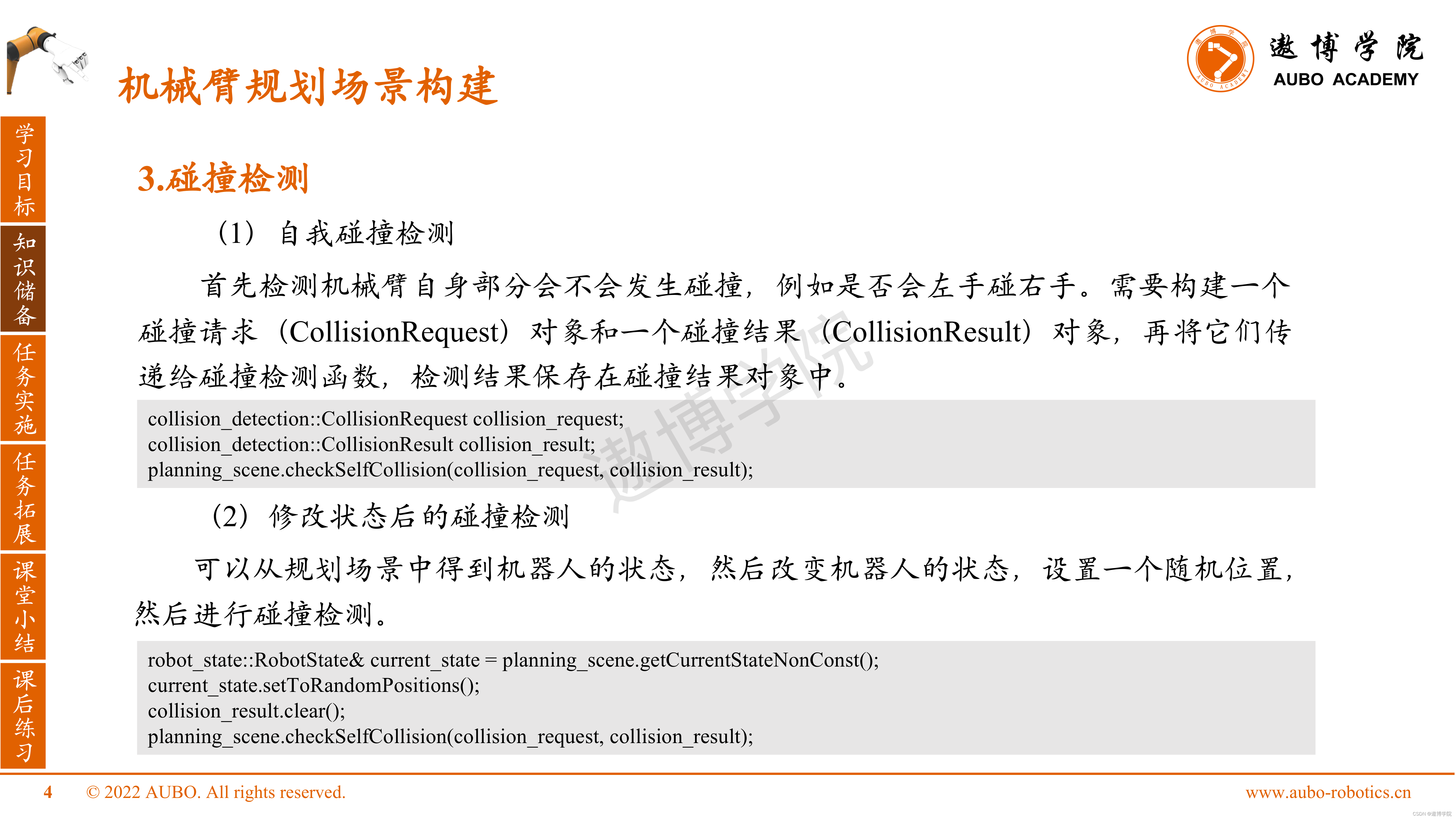
(1)自我碰撞检测
首先检测机械臂自身部分会不会发生碰撞,例如是否会左手碰右手。需要构建一个碰撞请求(CollisionRequest)对象和一个碰撞结果(CollisionResult)对象,再将它们传递给碰撞检测函数,检测结果保存在碰撞结果对象中,实现代码如下
(2)修改状态后的碰撞检测
可以从规划场景中得到机器人的状态,然后改变机器人的状态,设置一个随机位置,然后进行碰撞检测。实现代码如下。
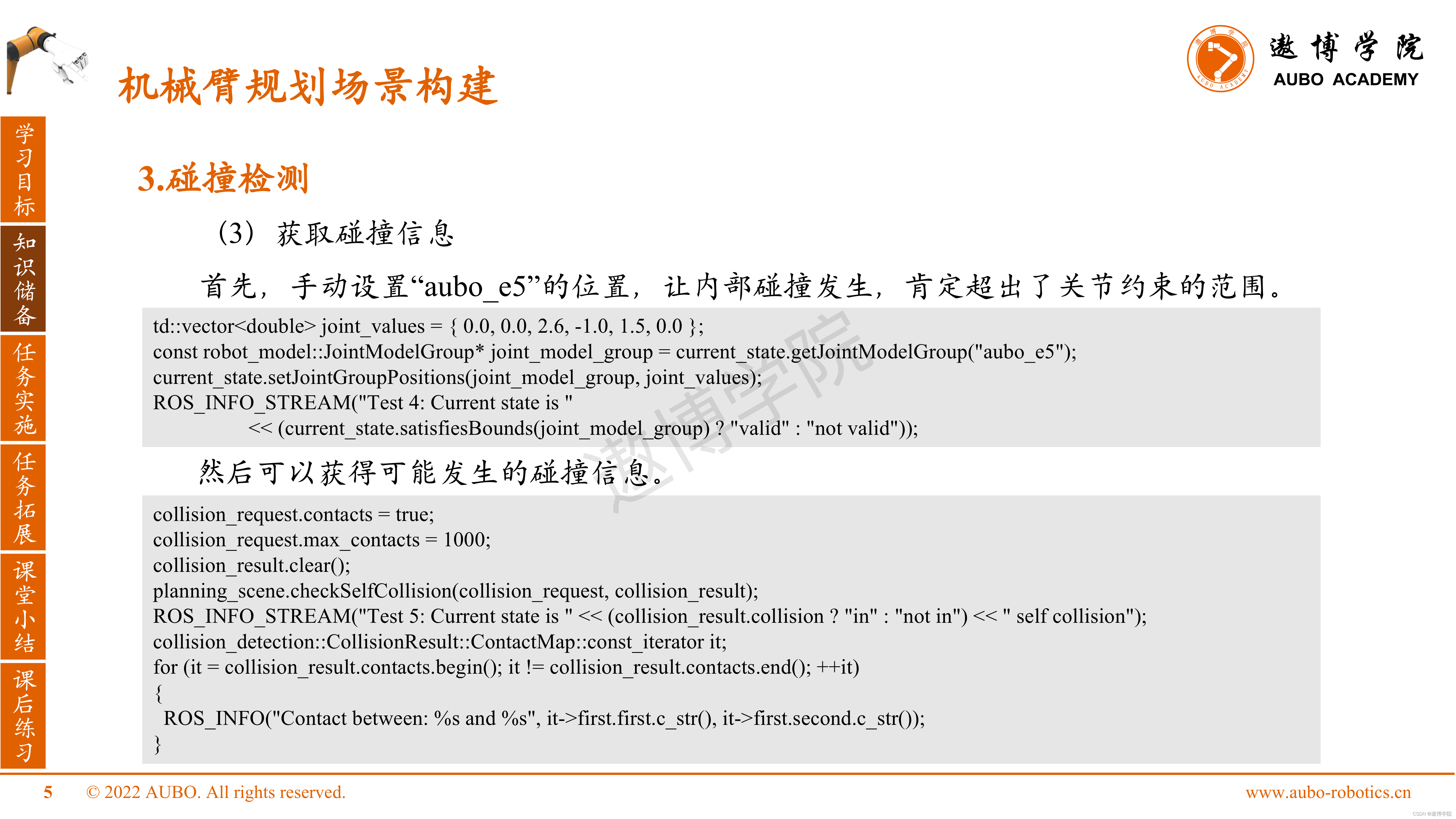
(3)获取碰撞信息
首先,手动设置“aubo_e5”的位置,让内部碰撞发生,肯定超出了关节约束的范围。然后可以获得可能发生的碰撞信息,实现代码如下所示。
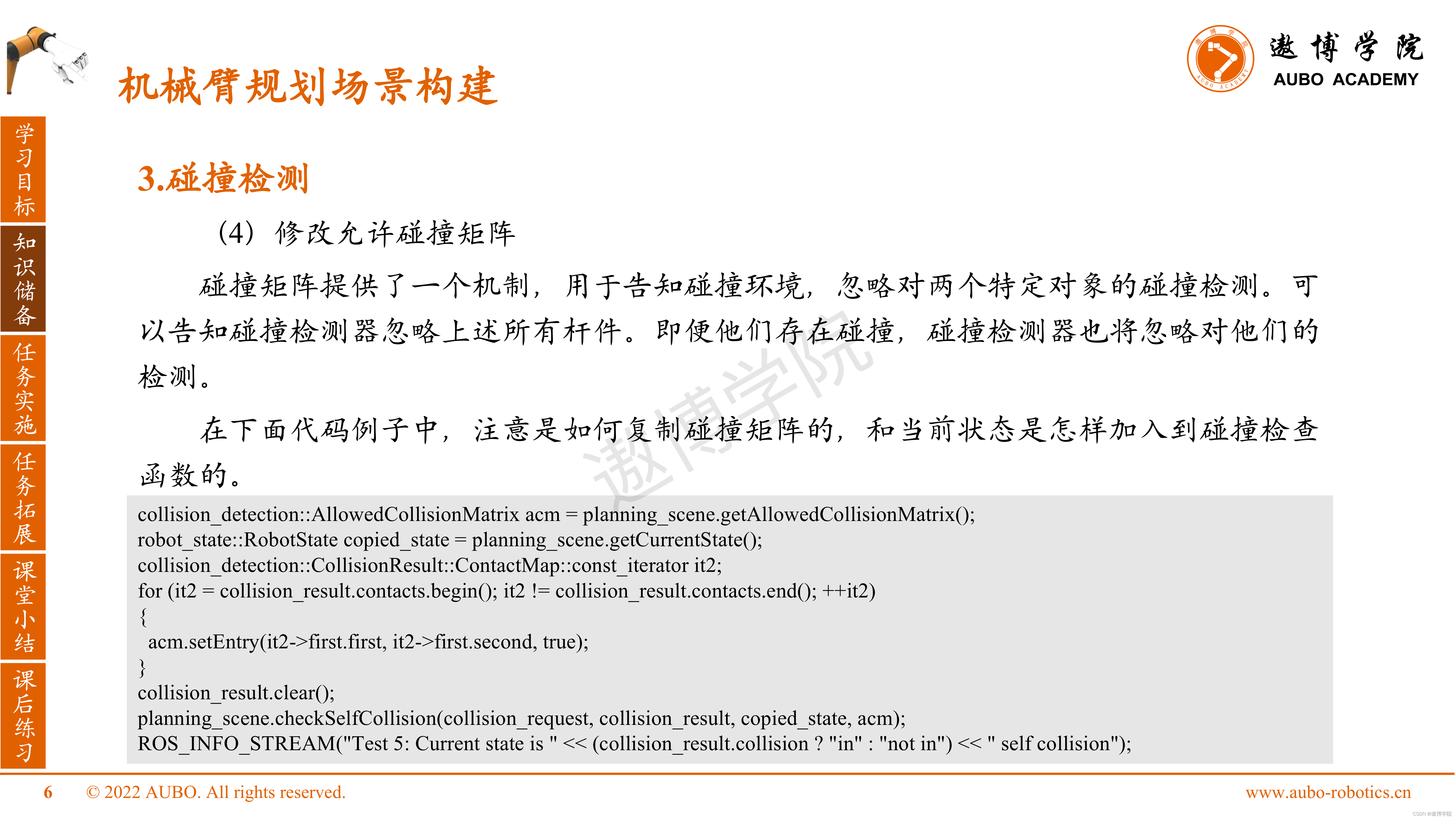
(4)修改允许碰撞矩阵
碰撞矩阵提供了一个机制,用于告知碰撞环境,忽略对两个特定对象的碰撞检测。可以告知碰撞检测器忽略上述所有杆件。即便他们存在碰撞,碰撞检测器也将忽略对他们的检测。
在下面代码例子中,注意是如何复制碰撞矩阵的,和当前状态是怎样加入到碰撞检查函数的。
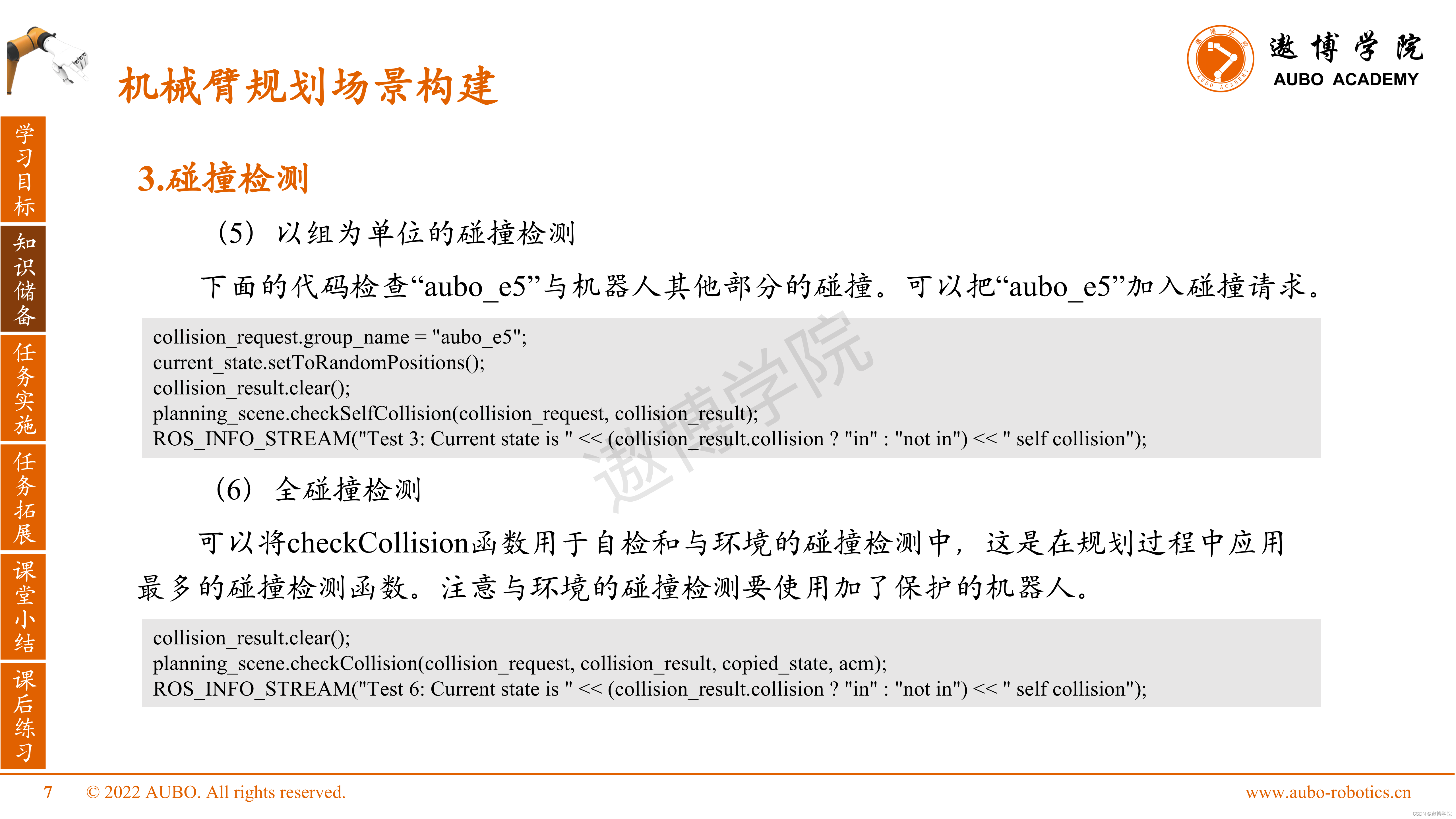
(5)以组为单位的碰撞检测
下面的代码检查“aubo_e5”与机器人其他部分的碰撞。可以把“aubo_e5”加入碰撞请求。
(6)全碰撞检测
可以将checkCollision函数用于自检和与环境的碰撞检测中,这是在规划过程中应用最多的碰撞检测函数。注意与环境的碰撞检测要使用加了保护的机器人。实现代码如下所示。
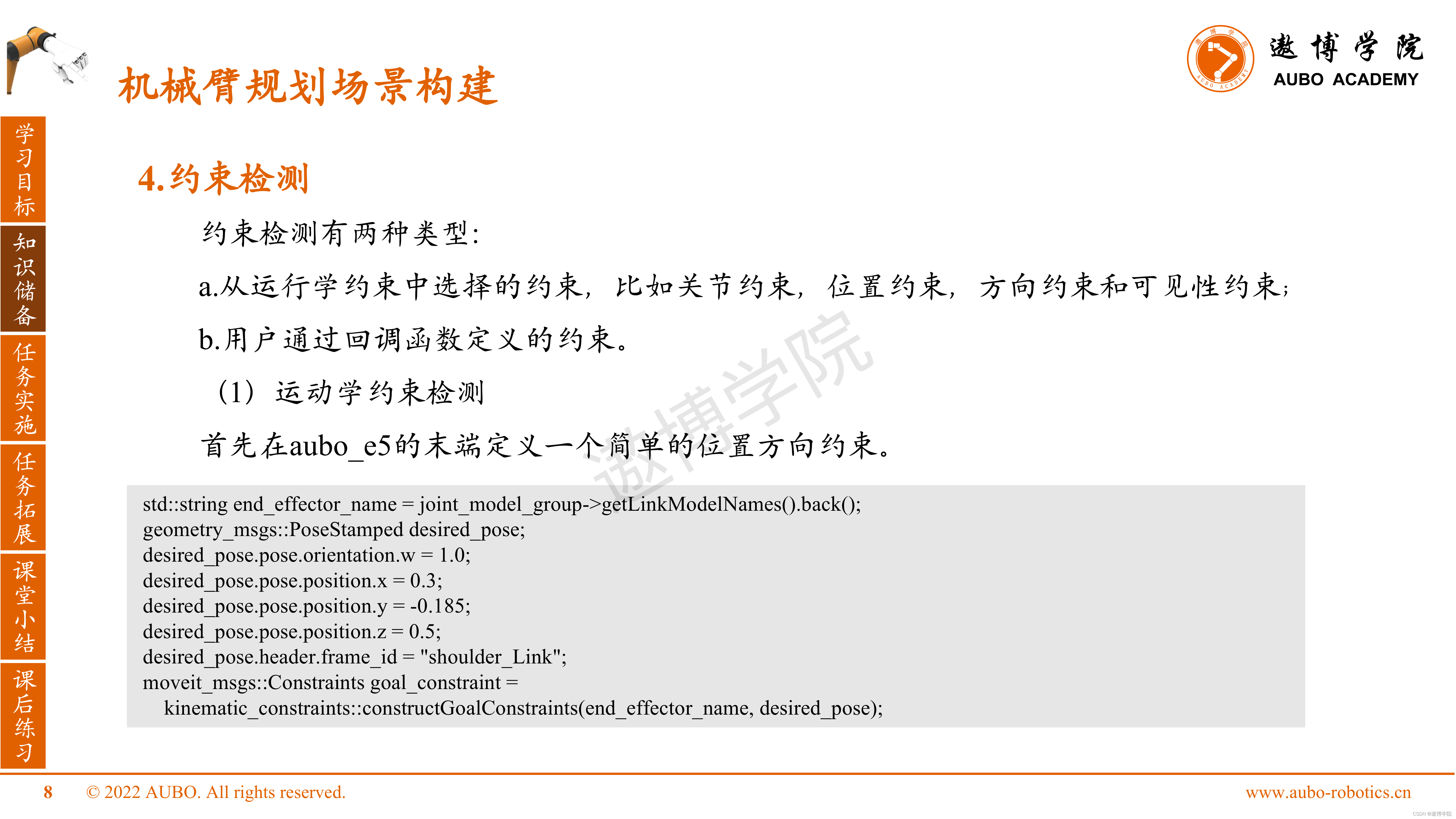
4.约束检测
约束检测有两种类型:
a.从运行学约束中选择的约束,比如关节约束,位置约束,方向约束和可见性约束;
b.用户通过回调函数定义的约束。
(1)运动学约束检测
首先在aubo_e5的末端定义一个简单的位置方向约束,实现代码如下所示。
可以使用PlanningScene类的isStateConstrained函数来检查状态是否符合约束。
当需要在同一个规划器中重复检查一个相同的约束的时候,还有一个更有效的方式。首先构建一个运动约束集(KinematicConstraintSet),用于预处理ROS约束消息。
下面代码是一个使用KinematicConstraintSet类比较直接的方式。
(2)用户自定义的函数可以在PlanningScene类中使用setStateFeasibilityPredicate函数调用自定义的回调函数来实现。下面的例子用于判断“shoulder_joint”的角度是否大于零。
当isStateValid被调用时,将执行三个检查:碰撞、约束和自定义回调函数的可行性,如下列代码所示。
五、任务实施
接下来,我们来看下,使用PlanningScene接口向规划场景中添加物体的程序演示。
10.机械臂规划场景构建
六、任务拓展
分析例程代码
在演示例程提供的代码中,找到哪些是规划场景有关的代码,并分析这些代码的作用,并在下列官方说明文档网址中,学习规划场景的相关的其他接口。
PlanningScene官方说明文档网址:http://docs.ros.org/en/indigo/api/moveit_core/html/classplanning__scene_1_1PlanningScene.html
七、课堂小结
下面我们进行课堂小结:
ROS的规划场景功能可以完成碰撞检测与约束检测,在开发过程中,可以在机械臂的规划场景中添加或删除物体从而与真实环境一致,构建符合真实环境的规划场景。
八、课后练习
最后给大家布置一道课后习题
尝试使用PlanningScene编程接口,向规划场景中的机械臂的末端添加圆柱形物体,并且可以随着机械臂运动。

在接下来的ROS课程中,我们会讲解遨博机械臂自主避障,欢迎持续关注。


















 5796
5796

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









