





ArduSub is an advanced open-source ROV/AUV control system.
Overview
ArduSub水下机器人的控制器是一个完整的开源解决方案,提供远程操作控制(通过智能潜水模式)和全自动的执行任务。
作为DroneCode软件平台的一部分,它能够无缝地使用地面控制站的软件,可以监控车辆遥测和执行强大的任务规划活动。它还受益于DroneCode平台的其他部分,包括模拟器,日志分析工具,为车辆管理和控制和更高层次的api。
ArduSub海洋机器人技术的前沿,针对那些想尝试先进技术,前沿软件和新功能。它可以用在许多不同类型的ROV包括几个配置器。
Key Features
- Feedback control and stability: Based on a multicopter autopilot system, the ArduSub controller has accurate feedback control to actively maintain orientation.
- Depth hold: Using pressure-based depth sensors, the ArduSub controller can maintain depth within a few centimeters.
- Heading hold: By default, the ArduSub automatically maintains its heading when not commanded to turn.
- Camera Tilt: Camera tilt control with servo or gimbal motors through the joystick or gamepad controller.
- Light Control: Control of subsea lighting through the joystick or gamepad controller.
- No Programming Required: The ArduSub controller works for a variety of ROV configurations without the need for any custom programming. Most parameters can be changed easily through the ground control station.
What You’ll Need
There are numerous potential combinations of hardware and vehicles compatible with the ArduSub controller. Here’s a short summary list:
- Supported ROV with thrusters and speed controllers
- Autopilot controller like the 3DR PixHawk
- Tether for communication via serial or Ethernet
- Laptop computer with QGroundControl installed
- USB gamepad or joystick controller (example)
- Pressure sensor for depth measurement (example)
ROV
ArduSub is compatible with many different ROV frames. Please see here for a list of actively supported frames.
Hardware Controller
With DroneCode compatibility, the ArduSub controller is usable with many different hardware options including:
- PixHawk from 3DRobotics
- PixRacer* from AUAV
- Navio+/Navio2 from Emlid
- Erle Brain, PXFmini* from Erle Robotics
- BBBmini shield for BeagleBone Black
*These options have 8 or less PWM outputs and may not support all ArduSub frame types
Tether and Tether Interfaces
ArduSub is compatible with both serial and Ethernet based communication interfaces. The hardware autopilot used must support the option that you choose. The Pixhawk only supported a serial connection but can be connect to Ethernet through a companion computer. Other autopilots support Ethernet natively.
There are several available tether interface boards that work well with ArduSub:
- To be completed.
Topside and Ground Control Station
The ArduSub software is designed primarily to interface through QGroundControl (QGC), an open-source, cross-platform user interface for drones of all types. The interface connects to the ArduSub controller through the tether and displays vehicle status information and allows parameters and settings to be updated.
Most importantly, QGC interfaces with the joystick or gamepad controller used to command the vehicle. It is compatible with most USB joysticks. There are several recommended joysticks:
- Xbox 360 / Xbox One Controller with wireless USB connection
- Logitech 310 (wired) and Logitech 710 (wireless) gamepads
If using an Ethernet-based tether option and computer-based autopilot, then streaming video can be displayed directly in QGC.
Supported Frames
ArduSub includes a high-level motor library that can configure motors in any configuration. This library is used to implement a number of supported frame configurations. Currently supported are:
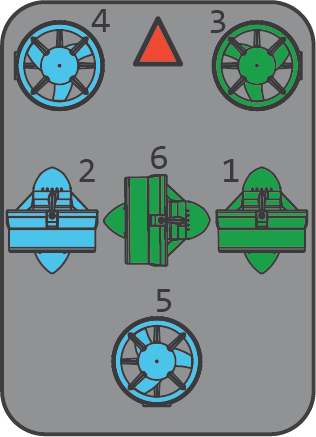
BlueROV Configuration with 6-DOF thruster positioning. (Frame: bluerov)
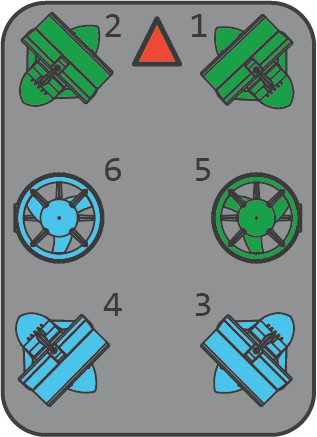
Vectored ROV with side-by-side vertical thrusters. (Frame: vectored)
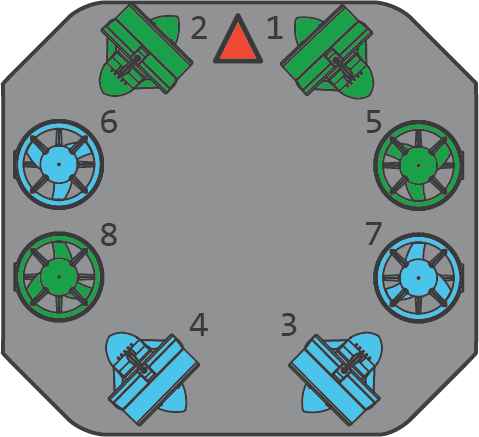
Vectored ROV w/ Four Vertical Thrusters, an 8-thruster configuration with 6-DOF control and heavy-lifting capacity. (Frame: vectored6dof)
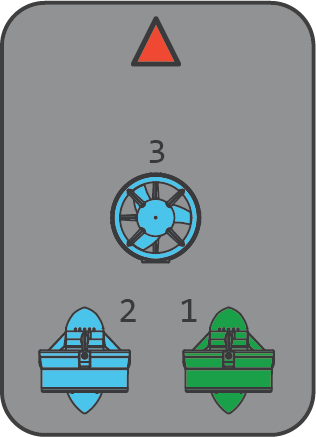
ROV with a single vertical thruster. (Frame: simplerov)
ROV with side-by-side vertical thrusters. (Frame: simplerov)
Please see here if you would like to add your own configuration.
Sensors and Actuators
In addition to the standard onboard sensors (IMU, compass), the ArduSub controller supports a number of external sensors including:
- Pressure/depth sensors for measurement and auto depth-hold (example)
- GPS for position at the surface (does not work underwater)
In the future the ArduSub controller will be able to interface with more sensors such as depth sounders, scanning sonars, temperature sensors, and conductivity sensors.
The controller can command dimmable lights and can be configured to control standard servos as well for additional functionality.
Applications
ArduSub provides the functionality needed for a wide variety of applications from simple observation-class ROVs to sophisticated research-class ROVs. Here’s a short list of applications that ArduSub-powered ROVs can be used for:
- Observation and exploration
- Wreck discovery and documenting
- Photography and videography
- Boat and equipment inspection
- Biological sampling and surveying
- Underwater retrieval
- Academic and research projects
- ROV and AUV competitions















 646
646











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









