







Service通讯-client端实现:
#!/usr/bin/env python
#coding:utf-8
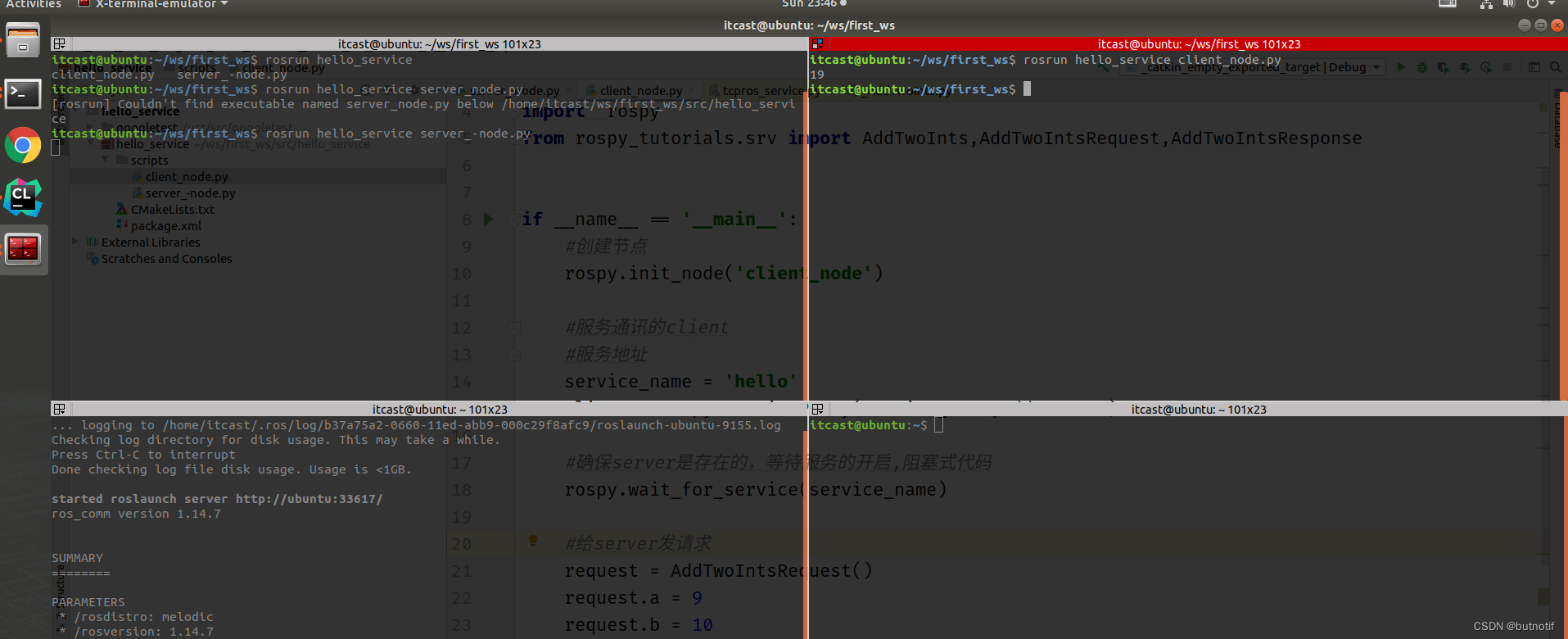
import rospy
from rospy_tutorials.srv import AddTwoInts,AddTwoIntsRequest,AddTwoIntsResponse
if __name__ == '__main__':
#创建节点
rospy.init_node('client_node')
#服务通讯的client
#服务地址
service_name = 'hello'
client = rospy.ServiceProxy(service_name,AddTwoInts)
#确保server是存在的,等待服务的开启,阻塞式代码
rospy.wait_for_service(service_name)
#给server发请求
request = AddTwoIntsRequest()
request.a = 9
request.b = 10
response = client.call(request)
if isinstance(response,AddTwoIntsResponse):
print response.sum
rospy.spin()
service命令行:















 7727
7727











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









