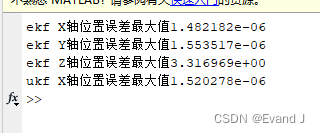
描述 对工具箱SINS/GPS,153例程的修改,将EKF和UKF放在一个文件里面,一次运行可以得到两个滤波的结果(带绘图与误差量化输出)。 片段 运行截图 程序完整源代码 在有工具箱的情况下,直接运行此代码,即可得到结果 % 基于PSINS工具箱的IMU数据生成与滤波 % date:2024-2-15 % Evand(evandworld@qq.com) % Ver1 clear











 订阅专栏 解锁全文
订阅专栏 解锁全文
















 125
125











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








