







无人机组合导航系统在复杂环境下的应用日益广泛,但在实际操作中,系统的非线性和不确定性仍然是影响导航精度的主要问题。传统的Kalman滤波算法在面对有色噪声、不确定参数和量测偏差等情况时,可能导致较大的估计误差,甚至系统发散。因此,开发一种鲁棒的滤波算法以提高导航系统的精度和可靠性十分必要。
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者
研究目标
本课题旨在将“Consider”方法引入随机采样的集合Kalman滤波算法中,设计一种鲁棒的Consider集合Kalman滤波算法,以应对无人机组合导航系统中的非线性和系统不确定性问题。通过数值仿真实验验证该算法的有效性与鲁棒性,分析其在实际应用中的潜力。
创新点
- 引入“Consider”方法:通过构建一组样本参数来处理不确定性,增强滤波器对量测偏差的适应能力。
- 鲁棒性提升:结合随机采样和加权平均机制,显著降低系统在非线性和不确定性情况下的估计偏差。
- 多传感器融合:在滤波过程中同一时间融合来自陀螺仪、加速度计和GPS等多种传感器的数据,提升系统整体的导航精度。
研究方法
- 模型构建:建立无人机组合导航系统的动态模型,考虑传感器的误差源。
- 算法设计:
- 设计鲁棒的Consider集合Kalman滤波算法,包含预测和更新步骤。
- 通过“Consider”方法生成模型参数集合。
- 数值仿真:使用MATLAB和Python对算法进行仿真,比较其与传统Kalman滤波算法的性能。
实现示例
MATLAB 示例代码
% MATLAB代码示例:鲁棒集合Kalman滤波算法
clc;
clear;
% 参数设置
numParticles = 100; % 粒子数量
numSteps = 50; % 时间步数
% 真实状态(随机生成)
true_state = cumsum(0.1 * randn(numSteps, 2)); % 真实位置(x, y)
% 初始化粒子
particles = repmat(true_state(1, :), numParticles, 1) + randn(numParticles, 2) * 0.5;
weights = ones(numParticles, 1) / numParticles;
% 保存估计状态
estimated_state = zeros(numSteps, 2);
for k = 1:numSteps
% 预测步骤
noise = 0.1 * randn(numParticles, 2);
particles = particles + noise;
% 更新权重
for i = 1:numParticles
% 假设测量值为真实状态加噪声
measurement = true_state(k, :) + 0.2 * randn(1, 2);
weights(i) = normpdf(measurement(1), particles(i, 1), 0.5) * ...
normpdf(measurement(2), particles(i, 2), 0.5);
end
weights = weights / sum(weights);
% 重采样步骤
indices = randsample(1:numParticles, numParticles, true, weights);
particles = particles(indices, :);
% 状态估计
estimated_state(k, :) = mean(particles, 1);
end
% 绘制结果
figure;
plot(true_state(:, 1), true_state(:, 2), 'g-', 'DisplayName', '真实状态');
hold on;
plot(estimated_state(:, 1), estimated_state(:, 2), 'b-', 'DisplayName', '估计状态');
xlabel('X位置');
ylabel('Y位置');
legend show;
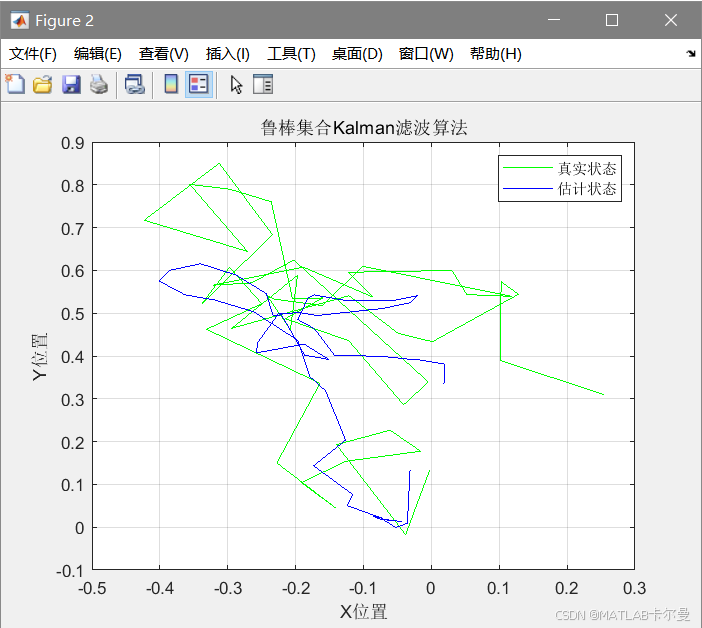
title('鲁棒集合Kalman滤波算法');
grid on;
hold off;
运行结果:
Python 示例代码
import numpy as np
import matplotlib.pyplot as plt
# 参数设置
num_particles = 100 # 粒子数量
num_steps = 50 # 时间步数
# 真实状态(随机生成)
true_state = np.cumsum(0.1 * np.random.randn(num_steps, 2), axis=0)
# 初始化粒子
particles = np.tile(true_state[0, :], (num_particles, 1)) + np.random.randn(num_particles, 2) * 0.5
weights = np.ones(num_particles) / num_particles
# 保存估计状态
estimated_state = np.zeros((num_steps, 2))
for k in range(num_steps):
# 预测步骤
noise = 0.1 * np.random.randn(num_particles, 2)
particles += noise
# 更新权重
measurement = true_state[k, :] + 0.2 * np.random.randn(2) # 假设测量值
weights = np.exp(-0.5 * np.sum((particles - measurement) ** 2, axis=1)) # 计算权重
weights /= np.sum(weights) # 归一化权重
# 重采样步骤
indices = np.random.choice(range(num_particles), size=num_particles, p=weights)
particles = particles[indices]
# 状态估计
estimated_state[k, :] = np.mean(particles, axis=0)
# 绘制结果
plt.plot(true_state[:, 0], true_state[:, 1], 'g-', label='真实状态')
plt.plot(estimated_state[:, 0], estimated_state[:, 1], 'b-', label='估计状态')
plt.xlabel('X位置')
plt.ylabel('Y位置')
plt.legend()
plt.title('鲁棒集合Kalman滤波算法')
plt.grid()
plt.show()
结论
本课题通过引入“Consider”方法和鲁棒集合Kalman滤波算法,旨在提升无人机组合导航系统在非线性和系统不确定性下的性能。研究结果将为无人机的高精度导航提供重要的理论支持和实践指导。
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











