







地磁导航利用地球磁场的自然特性,通过感知磁场变化,帮助机器人或无人设备实现定位和导航。相比于 GPS、激光雷达等导航方法,地磁导航具有以下优势:
- 低成本:使用地磁传感器(如电子罗盘),硬件成本低,适合大规模部署。
- 全天候:不受天气或光线条件的限制,适合室内外环境。
- 隐蔽性:无需外部信号支持,适应复杂或对隐蔽性要求较高的场景。
背景与研究意义
然而,地磁导航也面临一些挑战,例如环境磁场的时空变化、磁干扰的影响以及传感器噪声等。因此,研究基于低成本地磁传感器的鲁棒导航方法具有重要的理论和实践意义,尤其在室内定位、安防巡检和机器人导航中具有广泛的应用前景。
研究目标
本课题的目标是研究一种基于地磁特征的低成本导航方法,主要包括以下内容:
- 地磁特征建模:通过采集环境地磁数据,建立地磁特征地图。
- 定位与匹配算法:利用地磁传感器读取的实时数据,结合地磁特征地图,实现鲁棒的定位与导航。
- 抗干扰设计:针对地磁噪声和干扰问题,设计滤波算法提高导航精度。
技术路线
-
地磁特征建模:
- 利用地磁传感器采集环境磁场强度数据,记录三维磁场分量( B x B_x Bx, B y B_y By, B z B_z Bz)。
- 建立地磁特征地图 M ( x , y ) \mathbf{M}(x, y) M(x,y),以空间位置 ( x , y ) (x, y) (x,y) 为索引,存储对应的磁场特征向量。
-
实时定位与匹配:
- 根据传感器实时读取的磁场向量
B
r
e
a
l
=
[
B
x
,
B
y
,
B
z
]
\mathbf{B}_{real} = [B_x, B_y, B_z]
Breal=[Bx,By,Bz],与特征地图中的磁场特征向量
B
m
a
p
\mathbf{B}_{map}
Bmap 计算相似性:
相似性 = 1 − ∥ B r e a l − B m a p ∥ ∥ B m a p ∥ \text{相似性} = 1 - \frac{\|\mathbf{B}_{real} - \mathbf{B}_{map}\|}{\|\mathbf{B}_{map}\|} 相似性=1−∥Bmap∥∥Breal−Bmap∥ - 通过搜索特征地图,确定最匹配的位置 ( x , y ) (x, y) (x,y)。
- 根据传感器实时读取的磁场向量
B
r
e
a
l
=
[
B
x
,
B
y
,
B
z
]
\mathbf{B}_{real} = [B_x, B_y, B_z]
Breal=[Bx,By,Bz],与特征地图中的磁场特征向量
B
m
a
p
\mathbf{B}_{map}
Bmap 计算相似性:
-
抗干扰设计:
- 应用卡尔曼滤波或滑动窗口滤波,降低传感器数据中的高频噪声。
- 使用基于多点匹配的加权平均方法,增强定位鲁棒性。
关键公式
-
地磁特征向量:
B ( x , y ) = [ B x , B y , B z ] \mathbf{B}(x, y) = [B_x, B_y, B_z] B(x,y)=[Bx,By,Bz]
其中, B x B_x Bx, B y B_y By, B z B_z Bz 分别为测得的地磁场在三个轴上的分量。 -
相似性计算:
S ( x , y ) = 1 − ∥ B r e a l − B ( x , y ) ∥ ∥ B ( x , y ) ∥ S(x, y) = 1 - \frac{\|\mathbf{B}_{real} - \mathbf{B}(x, y)\|}{\|\mathbf{B}(x, y)\|} S(x,y)=1−∥B(x,y)∥∥Breal−B(x,y)∥
当 S ( x , y ) S(x, y) S(x,y) 的值最大时,认为当前位置与 ( x , y ) (x, y) (x,y) 最匹配。 -
卡尔曼滤波:
- 状态预测:
x k ∣ k − 1 = F x k − 1 + w k − 1 \mathbf{x}_{k|k-1} = \mathbf{F} \mathbf{x}_{k-1} + \mathbf{w}_{k-1} xk∣k−1=Fxk−1+wk−1 - 状态更新:
x k ∣ k = x k ∣ k − 1 + K k ( z k − H x k ∣ k − 1 ) \mathbf{x}_{k|k} = \mathbf{x}_{k|k-1} + \mathbf{K}_k \left( \mathbf{z}_k - \mathbf{H} \mathbf{x}_{k|k-1} \right) xk∣k=xk∣k−1+Kk(zk−Hxk∣k−1) - 卡尔曼增益:
K k = P k ∣ k − 1 H T ( H P k ∣ k − 1 H T + R ) − 1 \mathbf{K}_k = \mathbf{P}_{k|k-1} \mathbf{H}^T \left( \mathbf{H} \mathbf{P}_{k|k-1} \mathbf{H}^T + \mathbf{R} \right)^{-1} Kk=Pk∣k−1HT(HPk∣k−1HT+R)−1
- 状态预测:
MATLAB代码示例
% 基于地磁特征匹配的低成本导航
clear; clc; close all;
rng(0);
%% 1. 地磁特征地图生成
% 假设地图大小为10x10,随机生成每个点的地磁特征
mapSize = 10; % 地图大小
Bx = rand(mapSize, mapSize) * 50; % X方向磁场分量
By = rand(mapSize, mapSize) * 50; % Y方向磁场分量
Bz = rand(mapSize, mapSize) * 50; % Z方向磁场分量
% 地磁特征地图存储为矩阵
magneticMap = sqrt(Bx.^2 + By.^2 + Bz.^2); % 磁场强度
%% 2. 模拟真实传感器读取的磁场数据
% 假设真实位置为 (5, 5),读取其磁场特征
realPosition = [5, 5];
realBx = Bx(realPosition(1), realPosition(2));
realBy = By(realPosition(1), realPosition(2));
realBz = Bz(realPosition(1), realPosition(2));
realMagnetic = sqrt(realBx^2 + realBy^2 + realBz^2);
% 添加噪声
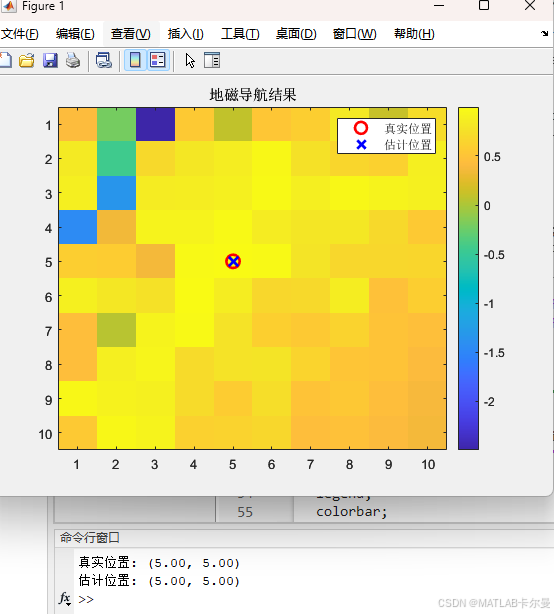
完整代码的运行结果:
代码说明
-
地磁特征地图生成:
- 使用随机值模拟一个大小为
10x10的地磁特征地图,每个点的磁场强度由 B x B_x Bx, B y B_y By, B z B_z Bz 组成。
- 使用随机值模拟一个大小为
-
传感器数据模拟:
- 在真实位置处采集地磁数据,并添加高斯噪声模拟传感器的不确定性。
-
定位算法:
- 通过计算传感器数据与地图中每个点的地磁特征相似性,找到相似性最大的点作为估计位置。
-
可视化:
- 绘制相似性分布图,并标注真实位置和估计位置。
课题价值
本课题不仅能够降低导航系统的硬件成本,还能在 GPS 信号失效或复杂环境中提供可靠的导航方案。结合地磁特征建模与抗噪算法,可进一步提高系统的鲁棒性和精度,为服务机器人、物流无人车和安防巡逻等领域提供重要技术支撑。
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者



















 5841
5841

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











