






1、介绍
光流在实际环境中应用很难,因为大部分同质区域,如白墙,没有足够的特征点来计算光流。
我们的算法&实验:
1. 相对大小探测器感知和避撞前方障碍物;
2. 特征描述器探测特征点大小的相对变化并实现实时避撞;
3. 使用引导算法使MAV在森林中飞行,实验中整条路径中摆放了20个障碍物。
2、相关工作
由于大小、重量和能量的限制,考虑到计算能力的改进和需要计算比较少,相机是UAV上可承载的最小的传感器。
生物视觉系统:
1. 运动视差;(光流、SFM)
2. 单目cues;
2. 立体视觉。
光流方法的局限性在于:帧与帧间的光流与前方角度成比例,这个对墙壁跟踪和中心飞行时有用,但是对于避撞来说作用很小。
尽管单目方法不能直接测量到障碍物的距离,但仍然可以用来避撞,因为光流与到障碍物的时间有一定关系。
本文提出是单目线索方法之一,用相对大小来探测前方障碍物。当UAV前方物体变大时,说明障碍物临近UAV。障碍物变化与临近障碍物时间成比例。
文献[23-2012]使用光流在森林中避障,所以要看看。
3、方法
相对大小探测器函数参数为时间,返回障碍物的大小。当离障碍物的距离由3m变为了2m时,图像大小变为原来的1.5倍。因为图像帧率已知,因此可求得到障碍物的时间。
文献[14]中SIFT实时性差且没有应用到实际机器人中。
SUFT特征点(openCV已经封装此函数):1)比SIFT计算快;2)可计算相对大小变化,即使障碍物大小变化仍可很好匹配.
本文通过匹配连续图像中的特征点,比较特征点所在区域大小的变化来识别是否摄像头靠近障碍物。
当前特征点扩大率由原先特征点大小的改变和模块匹配组成。
3.1 规模扩大器算法:
用于匹配,过滤和计算连续图像帧SURF特征点相对变化。
输出:障碍物的位置。
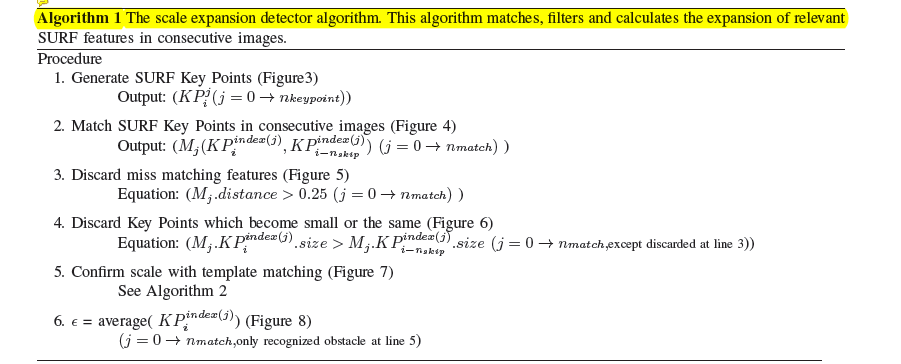
1. 计算SURF特征点;
2. 连续图像匹配SURF特征点;
3. 去除没有匹配的点,如果两匹配点间距离小于0.25;
4. 去除特征点变小或者不变的点;
5. 确定模块匹配范围:(模块匹配算法输出:可以表示障碍物的特征点)
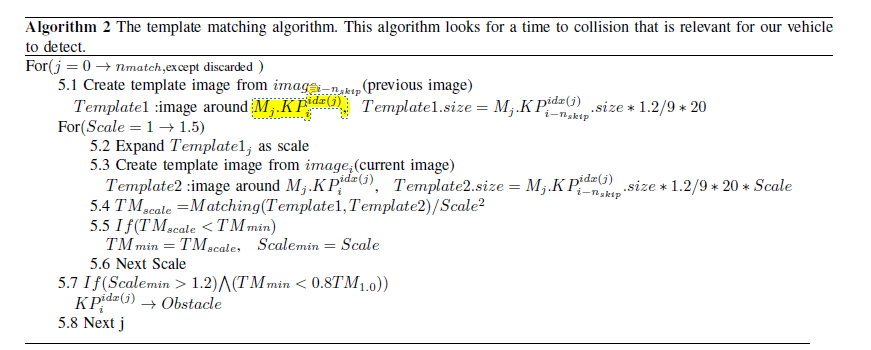
- 上述Template1中KP下标应该是i-nskip,因为其实由第i-nskip图像生成的;
- 5.1 Template1为第i-nskip帧图像的第j个特征点周围截取size的大小;
- 5.2 在每次循环中,将此块图像Template1扩大到和Template2一样;
- 5.3 Template2的选取和Template1一样;
- 5.4 Template1和Template2进行匹配,计算它们中每个像素的不同,然后输出和它们大小一样的图像(这个是文中说的);而此处TMscale表示在此scale下模块匹配的结果,即两个图像匹配特征点形成的矢量(类似光流),因为图像xy均扩大了scale倍,则这里除scale2.
- 5.5 保存在循环中运动最小的矢量(其越小,说明两个图像的匹配度越高,即Template1在变化很小的时候就可以变成Template2)和对应的比例scale;
- 5.7 如果最小比例scale大于1.2(说明在camera运动过程中离障碍物越近,障碍物变大。如果小于1.2则我们认为前方是同质区域,如白墙等)且运动矢量(光流)小于[0.8*标准],则将j特征点标记为障碍物。
6. 计算剩余点的平均值,即为障碍物。
3.2 避撞策略
- 若在视野中发现障碍物,则无人机向一旁飞;
- 控制航向角来到达目的地。
以下参数的设置保证飞行轨迹的合理性:反应时间;加速限制;飞行速度;障碍物感知距离;视野;树干大小;两树间的最小速度。
4、实验
- 配置:
- 前方相机92度,320X240的像素,频率为10Hz,算法中采用8bits RGB信息存储的灰度图像,算法在地面计算机上实现。
- 采用声纳高度传感器、IMU(陀螺仪、加速度传感器)和向下的相机来控制AR.Drone的高度。
- 实验:
- 仿真实验;
- 放置8个树桩,AR.Drone试飞测试,23次,20次成功。
本文参考文献[26-2012]的场景设计,可以看一下。
- 结论:
该算法使用低像素的单目摄像头、普通的PC,在复杂环境中提取SUFT特征点且结合比例扩大器算法识别障碍物位置,并且不需要障碍物的先验知识,可以避开类似tree这样的slim障碍物。但是需要障碍物的质地是SURF特征点。
5、想法
- 交叉障碍物场景参考。















 342
342

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









