







✅博主简介:本人擅长建模仿真、程序设计、论文写作与指导,项目与课题经验交流。项目合作可私信或扫描文章底部二维码。
自动泊车系统作为智能驾驶技术的重要组成部分,能够有效提高驾驶安全性和便捷性。在此研究中,我们针对自动泊车过程中的路径规划与跟踪控制进行了深入探讨,提出了一套综合解决方案。主要内容包括车辆运动学模型的建立、改进的Bi-RRT*路径规划算法以及基于模型预测控制的运动控制器设计。
车辆运动学模型的建立
在自动泊车过程中,车辆的行驶速度通常较低,因此必须考虑在低速状态下的运动特性。基于阿克曼转向原理,我们建立了相应的车辆运动学模型。阿克曼转向原理考虑了车辆的转向特性,使得模型能够更真实地反映车辆在行驶过程中的行为。
同时,为了确保泊车过程中的安全性,我们根据碰撞检测的原理,建立了专门针对泊车场景的车辆碰撞检测模型。该模型通过对周围环境进行实时监测,判断车辆与障碍物之间的距离,并在路径规划过程中及时反馈,确保在整个泊车过程中不发生碰撞。
Bi-RRT*算法的改进
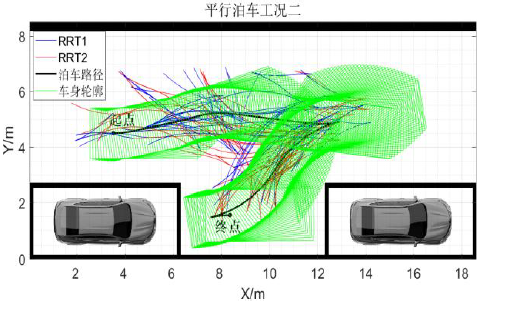
在路径规划中,原始的渐进最优双向快速搜索随机树(Bi-RRT*)算法存在一定的局限性。为提高其在泊车场景中的应用效果,本文对该算法进行了三方面的改进。
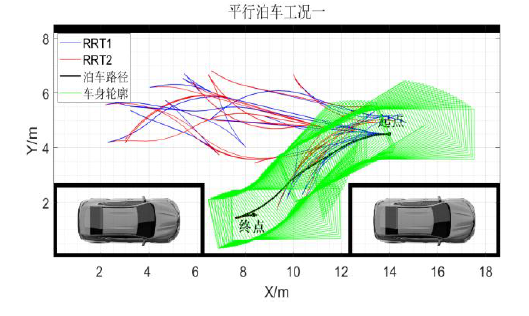
首先,引入Reeds-Shepp曲线进行节点扩展。这种曲线能够有效地符合车辆的运动学约束,使得生成的路径更加符合实际情况。同时,通过对Reeds-Shepp曲线的路径代价进行修改,我们能够减少不必要的曲线和倒车路径,从而优化规划效率。
其次,我们在算法中引入了两种约束采样方式:避障采样和径向采样。这一措施显著提升了算法的采样效率,使得在复杂的停车环境中,车辆能够更快速地找到合适的路径。
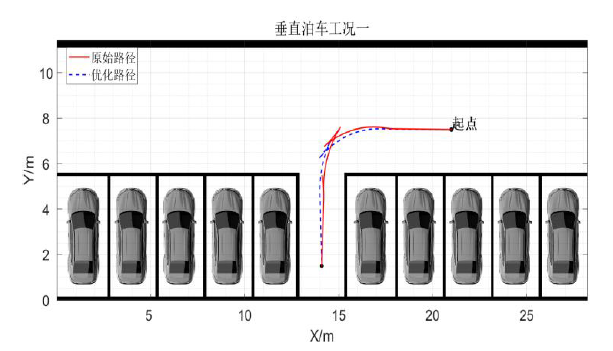
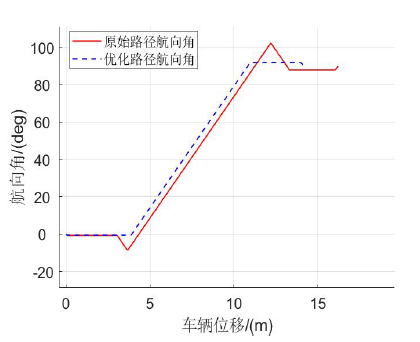
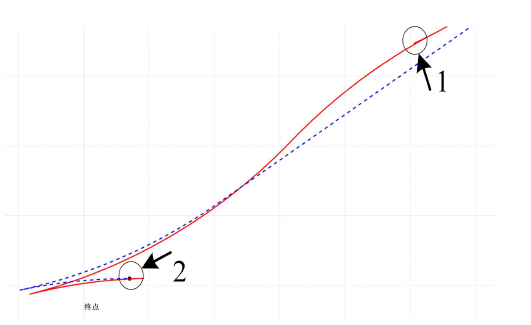
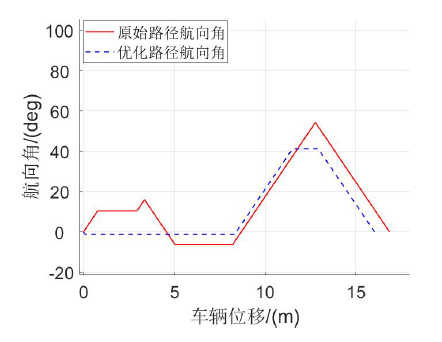
最后,针对生成的初步泊车路径,我们实施了剪枝和平滑优化。这一过程确保了最终规划路径的最优性,同时降低了路径复杂度,提高了行驶安全性。
经过多次仿真验证,改进后的算法能够在不同的起始位置和泊车场景中快速规划出符合车辆运动学约束且安全无碰撞的泊车路径。这为自动泊车系统的实用性提供了有力支持。
基于模型预测控制的运动控制器设计
为了确保车辆能够准确跟踪规划的路径,本文基于模型预测控制(MPC)设计了车辆运动控制器。MPC作为一种前馈控制策略,能够有效应对动态变化的环境和复杂的控制任务。
在设计MPC控制器时,首先需要建立车辆的预测模型。这一模型考虑了车辆的运动学特性,能够对未来的状态进行准确预测。接着,我们设计了目标函数和约束条件,以使得车辆在跟踪路径的过程中尽量减小误差,并确保在操作过程中不会发生碰撞。
通过Simulink和CarSim的联合仿真,我们对MPC控制器的效果进行了验证。结果显示,规划的路径合理且跟踪算法准确,车辆在不同环境和场景下均能安全、平稳地完成泊车操作
% Autonomous Parking System Path Planning and Control
% Parameters initialization
num_particles = 50; % Number of particles for PSO
max_iterations = 100; % Maximum iterations
target_position = [5, 5]; % Target parking position
initial_position = [0, 0]; % Initial position
path = []; % Path for the vehicle to follow
% Main algorithm loop for path planning
for iter = 1:max_iterations
% Sample points and evaluate potential paths
new_position = sample_new_position(initial_position);
if is_valid_path(initial_position, new_position) % Check if the path is valid
path = [path; new_position]; % Add new position to the path
end
end
% MPC controller for tracking the path
for t = 1:length(path)
current_position = path(t, :);
% Predict future states based on the vehicle model
[predicted_states] = predict_vehicle_model(current_position);
% Compute control input to minimize error
control_input = compute_control_input(current_position, target_position, predicted_states);
% Apply control input to the vehicle
update_vehicle_position(control_input);
end
function new_position = sample_new_position(current_position)
% Randomly sample a new position based on the current position
new_position = current_position + rand(1, 2) * 0.5; % Random offset
end
function valid = is_valid_path(start_pos, end_pos)
% Check if the path between start and end positions is valid (no collision)
valid = true; % Placeholder for actual collision detection logic
end
function [predicted_states] = predict_vehicle_model(current_position)
% Simulate the vehicle's future states based on the current position
predicted_states = current_position; % Placeholder for actual prediction
end
function control_input = compute_control_input(current_position, target_position, predicted_states)
% Calculate control input based on the difference from the target position
control_input = target_position - current_position; % Simple proportional control
end
function update_vehicle_position(control_input)
% Update vehicle's position based on the control input
% Placeholder for actual vehicle movement logic
end


















 3977
3977

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











