






 本文详细解释了Vivado工具中的set_multicycle_path功能,用于在FPGA设计中调整多周期时序路径的分析要求,以优化资源利用并确保时序收敛。作者通过实例说明了如何在不同时钟域和相位条件下正确使用此功能。
本文详细解释了Vivado工具中的set_multicycle_path功能,用于在FPGA设计中调整多周期时序路径的分析要求,以优化资源利用并确保时序收敛。作者通过实例说明了如何在不同时钟域和相位条件下正确使用此功能。
1.定义
和set_max_delay/set_min_delay一样属于时序例外的一种。
时序例外在之前的文章中讲过,如果不去约束的话,可能会造成时序资源的浪费,不因该分析的分析了,不应该优化的优化了,不应该这么严格去分析的也这么严格的去分析了,跑这样的程序浪费电脑资源,同样也会增加运行时间。
时序例外有几种:
(1)set_false_path:直接设置不分析
(2)set_max_delay/set_min_delay:直接覆盖默认requirement
(3)set_case_analysis:设置pin或port为常数或特定跳变沿,相当于设置palse_path
(4)set_multicycle_path:相对于源时钟或者目的时钟去调整requirement
针对set_multicycle_path,其定义为:根据源时钟或目的时钟,通过修改路径requirement倍数,改变路径requirement,来放松该路径的setup或hold分析要求,以满足时序收敛。
这里再解释一下什么是requirement,vivado工具默认进行的是单周期的时序分析,一般一条时序路径默认对应了一个requirement,是根据时钟周期来确定的,也就是一般情况下setup的requirement是一个时钟周期(默认单周期分析,当前时钟launch,下个时钟周期capture),hold的requirement就是0;
2.语法及说明
set_multicycle_path <path_multiplier> [-setup|-hold] [-start|-end] [-from <start_point>] [-to <endpoint>] [-through <pins|cells|nets>]
其中:
[-setup|-hold]表明是调整建立时间的还是保持时间的;
[-start|-end]表明是相对于源时钟还是相对于目的时钟来调整,setup默认对应-end,hold默认对应-start,如果要对应源时钟来调整setup,则使用-setup -start,hold同理,如果是两个时钟一致,则-end/-start没有区别,UG903里有一个官方的总结:
上图中的Moves the launch edge和Moves the capture edge也正是set_multicycle_path的调整方式,就是挪动默认的发起沿和捕获沿, 无论是setup还是hold,requirement就是两个沿的时间差。
但是这里需要注意的是,由于保持时间检查是在建立时间检查的基础上进行的,也就是说,得先确立一条路径的建立时间检查的发起沿和捕获沿,才能确认该路径的保持时间检查需求,这是因为,保持时间检查是为了确保两个事儿:
(1)当前发起沿发送的数据,不被当前捕获沿之前的时钟沿所捕获
(2)当前发起沿的下一个时钟沿发送的数据,不被当前捕获沿所捕获
然后工具会去分析,以上两个关系中哪个情况比较恶劣,选最坏的哪个作为该路径的hold分析时钟沿基础,这是xilinx所有FPGA时序分析的基础,也比较关键。
再回到主题,如果你只调了建立时间的multicycle,相当于发起沿或者捕获沿的位置变了,这时候,hold分析用的时钟沿关系就也变化了,所以,一般调整了setup的多周期路径,就得跟着调整hold的多周期路径。
3.举几个例子
(1)相同时钟域下的多周期路径

这种路径也是非常常见的一种多周期路径,默认情况下,静态时序分析工具(STA)会认定其建立与保持时间关系为:
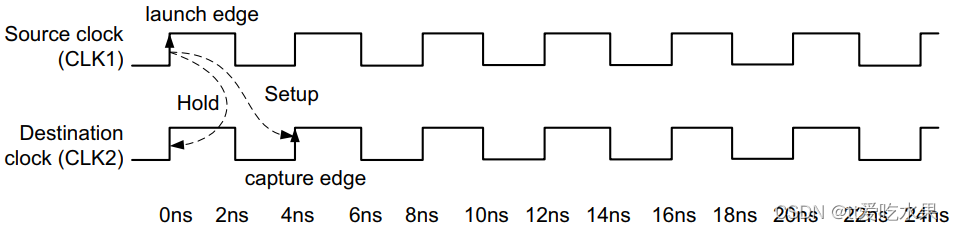
这也是在实际工程中比较常见的场景,此时可能由于DATAPATH过于复杂,导致数据无法在一个时钟周期内稳定下来,或者数据能在一个时钟周期内稳定下来,但是在几个时候周期后才会去使用它,这时候就需要用户去指示STA工具这是一条多周期的路径,需要以例外的方式处理它。
0ns处为发起沿,4ns处为捕获沿,这是这条路径最差的建立时间关系,所以setup requirement就是4ns(一个时钟周期),在此基础上,衍生出两个hold关系(如前面所述),选其中最差的(两个一致),就是途中标hold的那个关系,两个时钟沿做差,结果为0,所以hold requirement就是0ns。
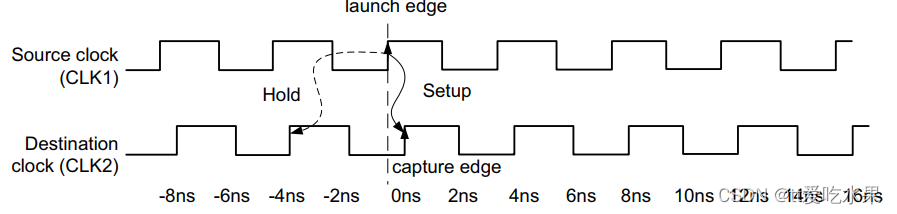
在上述基础上,给两个寄存器加上个CE(clock enable)信号,这个信号两个时钟周期拉高一次,也就是如下图所示的关系:

这时候,如果还是按照上图中的关系去分析建立时间,会造成STA的资源浪费,应为没有必要让建立时间关系这么紧,实际上,建立时间关系可以放松到下一个时钟沿,也就可以如下设置多周期:
set_multicycle_path -setup -end 2 -from <startpoint> -to <endpoint>
其中2是path_multiplier,可以这么理解,setup是指定分析沿向指定方向移动path_multiplier-1个时钟周期,hold的path_multiplier是指定分析沿向指定方向移动path_multiplier个时钟周期。
但是经过这么一调整,setup的requirement放松了,但是hold关系变了,变成下面的关系了:

这样的hold关系是很难满足的,因为捕获沿后移,对应的捕获沿前一个时钟沿也相当于后移了,根据hold slack = data_arrive_time - require_time,而其中的require_time = capture_edge + clock_delay + hold_time,capture_edge变大了,slack为正的难度就变大了。
所以这时候就需要再对hold的关系进行调整:
set_multicycle_path 1 -hold -end -from <start_point> -to [end_point]
这里的1代表,将hold分析中的目的时钟沿(由于使用了-end)向前移动1个时钟周期。
这时候,setup和hold关系就变为:

STA在以上的基础上去分析才是最优的。
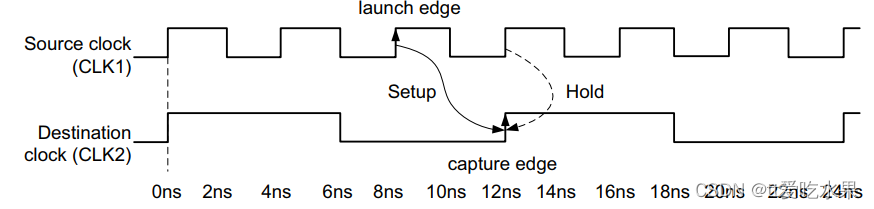
(2)同频不同相的两个不同时钟之间的多周期
假设clk1和clk2周期相同为4ns,相位差0.3ns,如下所示:

默认时序分析图如下:
因为vivado会在两个时钟公共周期内取最差的一条来当作setup分析的基础,所里这里setup需求为0.3ns,这基本是不可能满足的,且在这种情况下hold分析的需求是-3.7ns,这个需求又是十分宽松的。所以需要通过多周期进行调整这些不合理:
set_multicycle_path 2 -setup -from [get_clocks clk1] -to [get_clocks clk2]
(3)慢时钟到快时钟
假设clk1周期是clk2的三倍,默认关系如下:
 应调整为:
应调整为:
set_multicycle_path 3 -setup -from <start_point> -to <end_point>
set_multicycle_path 2 -hold -end -from <start_point> -to <end_point>
调整之后:

(4)快时钟到慢时钟
假设clk2周期是clk1的3倍,默认关系如下:
应调整为:
set_multicycle_path -setup -start 3 -from <start_point> -to <end_point>
set_multicycle_path -hold 2 -from <start_point> -to <end_point>
调整之后:
















 3656
3656

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









