







Abbr:
![]() TBD
TBD
![]() 牢记
牢记
 重点
重点
贝叶斯滤波器有多种数学表达形式:
从卡尔曼滤波开始,用一阶矩和二阶矩表示置信度,然后利用离散的栅格表示法,最后引入使用粒子滤波的算法。
1. 扩展卡尔曼滤波:
扩展卡尔曼滤波定位用一阶矩和二阶矩 表示置信度 bel(x,), 即均值µ,和协方差 。
讨论: 在基于特征的地图中, EKF 如何实现?
预备知识:
C6 感知章节,
特征地图的表示--多个特征ID(地标) 构成的信息集合。
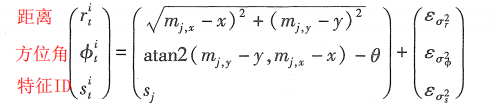
传感器测量模型:
已知:机器人的坐标![]() , 特征地图m 已知 (高精度地图),特征ID 也已知(特征匹配过程的输出结果),特征ID的测量结果Z
, 特征地图m 已知 (高精度地图),特征ID 也已知(特征匹配过程的输出结果),特征ID的测量结果Z
求:测量的概率模型(测量结果的置信度)?


个人理解如下:


。。。基础薄弱,看到这里,需要回去看前面章节。第五章,第三章KF 。。。















 359
359











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









