







第7讲视觉里程计
学习任务
- 理解图像特征点的意义, 并掌握在单幅图像中提取出特征点,及多幅图像中匹配 特征点的方法。
- 理解对极几何的原理,利用对极几何的约束,恢复出图像之间的摄像机的三维运 动。
- 理解PNP 问题,及利用已知三维结构与图像的对应关系,求解摄像机的三维运 动。
- 理解ICP 问题,及利用点云的匹配关系,求解摄像机的三维运动。
- 理解如何通过三角化,获得二维图像上对应点的三维结构。
7.1 特征点法
- 路标
- 特征点

举个栗子🌰ORB

BRIEF


7.2 2D-2D 对极几何



E共有五个自由度:也就是说至少有五对点就可以把E算出来,称为五点法但是比较麻烦,所以把它当成普通矩阵用八对点把E求出来。
八点法求矩阵E(Essential)

八对点构成的方程组8×9的矩阵,相当于AX=0的情况,解出A来就是要求的矩阵E
从E计算R,t:奇异值分解

使用H恢复R,t(八点法共面时)


小结

7.3 三角测量
在单目SLAM 中,仅通过单张图像无法获得像素的深度信息,我们需要通过三角测量(Triangulation)(或三角化)的方法来估计地图点的深度。
三角测量的定义
三角测量是指,通过在两处观察同一个点的夹角,确定该点的距离。在SLAM 中,我们主要用三角化来估计像素点的距离。
三角法求深度原理


7.4 3D-2D PnP(♥重要的姿态估计方法♥)
PnP定义
PnP(Perspective-n-Point)是求解3D 到2D 点对运动的方法。它描述了当我们知道n 个3D 空间点以及它们的投影位置时,如何估计相机所在的位姿。

如果两张图像中,其中一张特征点的3D 位置已知,那么最少只需三个点对(需要至少一个额外点验证结果)就可以估计相机运动。特征点的3D 位置可以由三角化,或者由RGB-D 相机的深度图确定。因此,在双目或RGB-D 的视觉里程计中,我们可以直接使用PnP 估计相机运动。而在单目视觉里程计中,必须先进行初始化,然后才能使用PnP。3D-2D 方法不需要使用对极约束,又可以在很少的匹配点中获得较好的运动估计,是最重要的一种姿态估计方法。
PnP问题求解方法
PnP 问题有很多种求解方法,例如用三对点估计位姿的P3P[45],直接线性变换(DLT),EPnP(Efficient PnP)[46],UPnP[47] 等等)。此外,还能用非线性优化的方式,构建最小二乘问题并迭代求解,也就是万金油式的Bundle Adjustment。我们先来看DLT,然后再讲Bundle Adjustment。
[45] X.-S. Gao, X.-R. Hou, J. Tang, and H.-F. Cheng, “Complete solution classification for the perspective-three-point problem,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 25, pp. 930–943, Aug 2003.
[46] V. Lepetit, F. Moreno-Noguer, and P. Fua, “Epnp: An accurate o(n) solution to the pnp problem,” International Journal of Computer Vision, vol. 81, no. 2, pp. 155–166, 2008.
[47] A. Penate-Sanchez, J. Andrade-Cetto, and F. Moreno-Noguer, “Exhaustive linearization for robust camera pose and focal length estimation,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 35, no. 10, pp. 2387–2400, 2013.
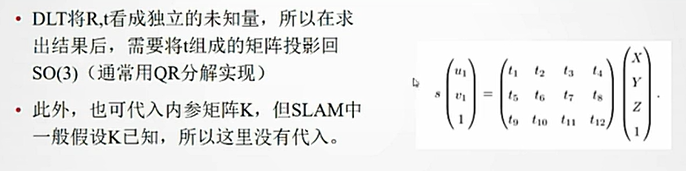
7.4.1 直接线性变换(DLT)

7.4.2 P3P
即:利用三对点求相机外参
它仅使用三对匹配点,对数据要求较少,推导请参考文献【49】
[49]iplimage, “P3p(blog).” “http://iplimage.com/blog/p3p-perspective-point overview/”, 2016.

P3P 需要利用给定的三个点的几何关系。它的输入数据为三对3D-2D 匹配点。记3D点为A,B,C,2D 点为a, b, c,其中小写字母代表的点为大写字母在相机成像平面上的投影。
P3P 还需要使用一对验证点,以从可能的解出选出正确的那一个(类似于对极几何情形)。记验证点对为D-d,相机光心为O。请注意,我们知道的是A,B,C 在世界坐标系中的坐标,而不是在相机坐标系中的坐标。一旦3D 点在相机坐标系下的坐标能够算出,我们就得到了3D-3D 的对应点,把PnP 问题转换为了ICP 问题。(因为图中OA的长度是未知的)



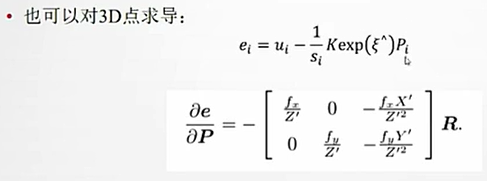
7.4.3 PnP 优化解法 Bundle Adjustment

前面说的线性方法,往往是先求相机位姿,再求空间点位置,而非线性优化则是把它们都看成优化变量,放在一起优化。这是一种非常通用的求解方式,我们可以用它对PnP 或ICP 给出的结果进行优化。


7.5 3D-3D ICP
假设我们有一组配对好的3D 点(比如我们对两个RGB-D 图像进行了匹配)

ICP的求解有两种方法:利用线性代数的求解(主要是SVD),以及利用非线性优化方式的求解(类似于Bundle Adjustment)。
7.5.1 SVD 方法
带匹配的



不为零只是无关

















 1999
1999











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









