







首先,已经可以根据demo仿写自己的工程,同时也就调用了系统自带的函数,这些函数在demo都有使用,很容易成功;其次,在上一篇中介绍了ROS2中系统API函数原型,这样也就可以调用demo中没有用到的系统中的函数;现在记录一下,ROS2中如何调用自定义cpp文件和h文件的方法。
先来干货再举例,在Ubuntu1804中是没有IDE编译器的,所以自定义的cpp文件和h文件需要手动关联起来,同时调用路径也需要手动添加。新建一个include文件夹,在其中新建ZtMathLibrary.cpp和ZtMathLibrary.h两个文件。
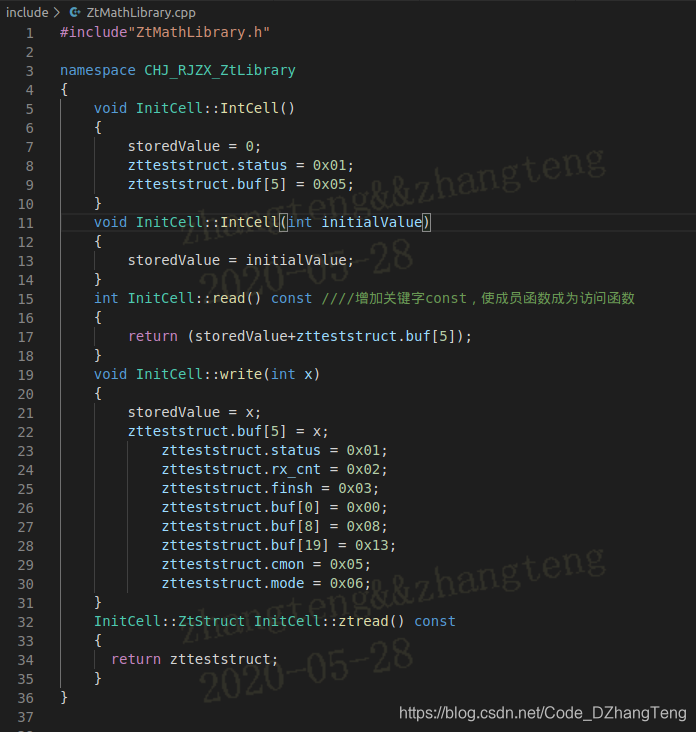
ZtMathLibrary.cpp内容如下:
ZtMathLibrary.h内容如下:

重点来了,在CMakeLists.txt中添加寻找include文件夹的路径;同时需要将ZtMathLibrary.cpp文件进行编译,传统的IDE编译器中会自动编译.cpp文件&#x
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2377
2377

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









