







参考链接:
Recording and playing back data — ROS 2 Documentation: Galactic documentation
使用docker创建了一个ubuntu1804镜像:
docker run -it --gpus all \
-p 8860:8860 \
-v /tmp/.X11-unix:/tmp/.X11-unix \
-v /home/lbw/temp_dir:/temp_dir \
-e DISPLAY=unix$DISPLAY -e GDK_SCALE -e GDK_DPI_SCALE \
--add-host docker_host:172.17.0.2 --add-host master_host:172.17.0.1 \
ubuntu:18.04
安装了一些系统必要的库
apt-get update
apt-get install wget
apt-get install python3
apt-get install gedit
apt-get install python3-argcomplete
通过鱼香ROS安装命令:
wget http://fishros.com/install -O fishros && . fishros
选择安装ros2-eloquent,安装完毕后运行小乌龟测试:
ros2 run turtlesim turtlesim_node

再看一个窗口:
ros2 run turtlesim turtle_teleop_key
小键盘上下左右遥控小乌龟画图
再开一个终端查看消息:
ros2 topic list

打印消息
ros2 topic echo /turtle1/cmd_vel
控制乌龟值线行走,可以打印乌龟的速度

ros2消息的操作,需要安装一下ros2 bag.
(和ros1不同,ros2桌面版不带bag工具,需要另外安装)
apt-get install ros-eloquent-ros2bag ros-eloquent-rosbag2*
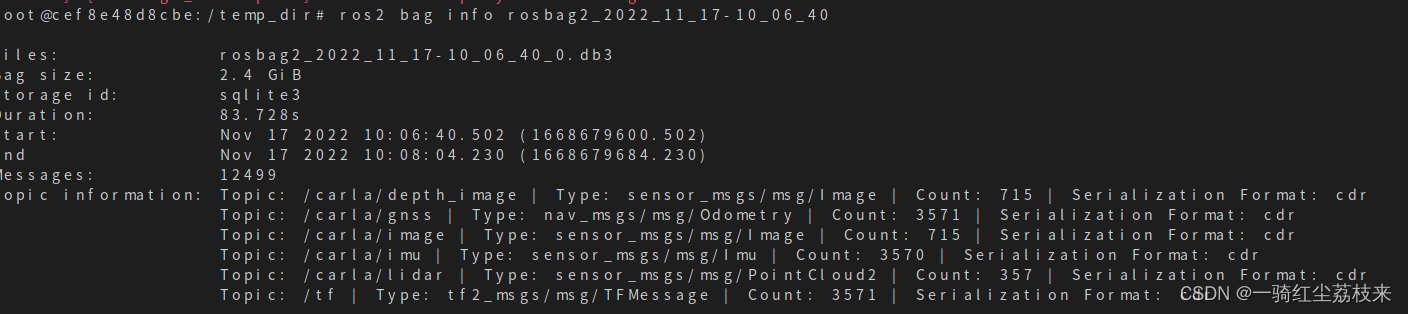
安装安成之后,查看包内消息:
rosbag2_2022_11_17-10_06_40是一个文件夹,ros2录制的都是文件夹:

ros2 bag info rosbag2_2022_11_17-10_06_40















 8380
8380











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









