







本专栏教程将记录我从安装carla到调用carla的pythonAPI进行车辆操控的全流程,带领大家从安装carla开始,到最终能够熟练使用carla仿真环境进行传感器数据采集和车辆控制.
第一节 carla 仿真环境的安装
准备工作:
在本节教程之前,需要大家安装ubuntu18.04以上的系统,并且安装对应的ros-melodic操作系统框架.以下的内容都是在ubuntu18.04环境下进行.并且,为了方便进行代码调试,推荐大家安装Vscode作为开发工具.为了方便查看carla提供的官方文档,建议下载Typora作为markdown文件浏览器.并且,为了使用显卡进行加速,还需要更新nvidia的显卡驱动>390,并安装cuda>10.1 的版本.
下载链接:
Typora:
https://www.aliyundrive.com/s/Fe4ixDY1JNV
Vscode:
https://www.aliyundrive.com/s/N8HPC8pZMhn
carla的安装方式有两种,一种是采用预编译包,一种是采用源码编译.为了方便安装,本次我们采用通过预编译包方式进行安装.
这里安装的carla版本为0.9.12
1.1下载:
通过github地址进行下载:
https://github.com/carla-simulator/carla/releases
需要下载以下两个包:
[Ubuntu] CARLA_0.9.12.tar.gz
[Ubuntu] AdditionalMaps_0.9.12.tar.gz
1.2 解压缩,把地图放入carla/Import目录下。
解压CARLA_0.9.12.tar.gz
tar -xzvf CARLA_0.9.12.tar.gz
之后把地图文件 AdditionalMaps_0.9.12.tar.gz移动到carla-0.9.12/Import目录下,无需解压.
然后运行下面的指令导入地图.
cd CARLA_0.9.12/
sh ImportAssets.sh
1.3 安装vulkan-utils
sudo apt install vulkan-utils
1.4 运行服务器
使用下面的命令运行服务器。
cd carla-0.9.12
sh CarlaUE4.sh


开启地图后,我们将处于上帝视角,你可以使用WASD键和鼠标进行导航。当然,这里什么都没有。这只是我们的服务器环境。下一步,我们将介绍如何使用python创建一个客户端程序,与服务器进行交互.
如果电脑运行比较卡,可以添加如下可选参数调低渲染 level:
sh CarlaUE4.sh -quality-level=Low
启动 CARLA 时,有一些配置选项可用:
carla-rpc-port=N:侦听端口 N 处的客户端连接。默认情况下,流式端口 Streaming port 设置为 N+1;
carla-streaming-port=N:指定用于传感器数据流的端口。 使用 0 获取随机未使用的端口。 第二个端口将自动设置为 N + 1;
quality-level={Low,Epic}:更改图形质量级别;
-carla-server:让 carla以服务的方式运行;
-benchmark -fps=15:引擎以1/15秒的固定时间逐步运行;
- 还可以修改启动服务器时的默认地图:
方法:在carla/Unreal/CarlaUE4/Config/DefaultEngine.ini中,把TownXX全部改成想要的地图。
可能出现的问题
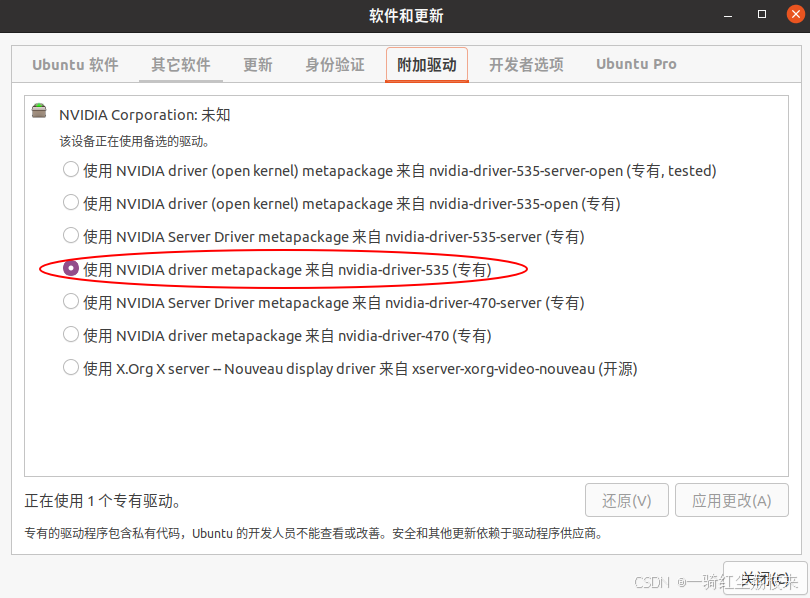
问题1 WARNING: lavapipe is not a conformant vulkan implementation, testing use only.
参考文章:Carla在Ubuntu的失败到成功记录
可以使用ubuntu"软件和更新"中的附加驱动重新安装显卡驱动,选择nvidia-driver-535(专有)。如果你的界面显示是灰色的,name参考这篇文章ubuntu22.04 出现附加驱动全部灰色,无法使用专有驱动,就可以恢复选项。

















 4907
4907

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









