






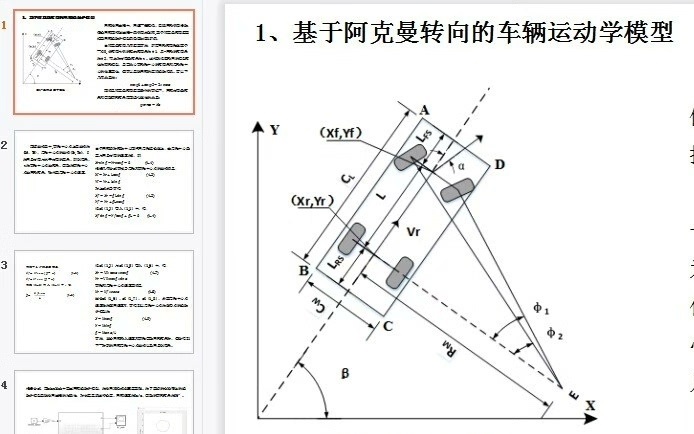
基于阿克曼转向的车辆运动学模型
在simulink中建立车辆运动学模型,为路径规划奠定基础,能够更好的检验简化的运动学模型反映运动过程的准确性。
包括:1、simulink仿真验证(版本为2018b)
2、说明文档--详细的建模过程
YID:8817702455641075
友帮计算
基于阿克曼转向的车辆运动学模型在路径规划和仿真验证中起着至关重要的作用。本文将介绍如何在Simulink中建立该模型,并详细说明建模过程,以帮助读者更好地理解和应用。
一、引言
随着汽车技术的不断发展,车辆运动学模型成为路径规划和控制的核心要素。阿克曼转向模型是一种常用的车辆运动学模型,可以准确地描述车辆行驶过程中的转向特性。本文将基于阿克曼转向模型,在Simulink中构建车辆运动学模型,以验证简化的运动学模型的准确性。
二、Simulink仿真验证
Simulink是Matlab软件中的一个功能强大的仿真工具,可以帮助工程师们建立各种系统的仿真模型。本文选择Simulink作为建模工具,通过仿真验证阿克曼转向模型的准确性。
-
Simulink软件版本
本文所使用的Simulink软件版本为2018b,在该版本下,Simulink提供了丰富的工具和库函数,方便用户进行车辆运动学模型的建模和仿真。 -
Simulink建模流程
(1)创建Simulink模型:首先,打开Simulink软件,创建一个新的模型文件。在模型文件中,可以添加各种需要的组件和模块。
(2)配置车辆参数:在Simulink模型中,设置车辆的参数,包括车辆的质量、转向角度、轮胎半径等。这些参数将影响车辆的运动学特性。
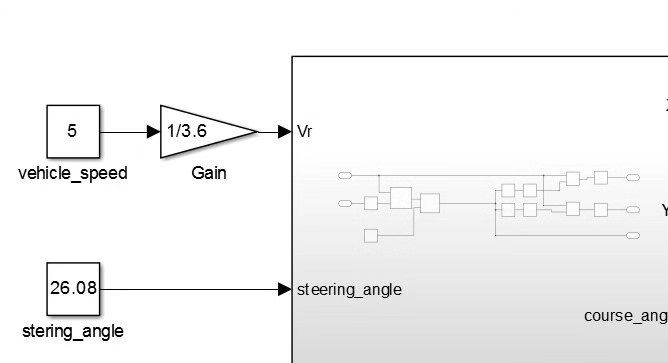
(3)添加阿克曼转向模块:在Simulink模型中,添加阿克曼转向模块。该模块可以根据车辆的参数和输入信号,计算出车辆的转向角度和轮胎转速。
(4)配置输入信号:在Simulink模型中,设置输入信号,包括车辆的速度、转向角度等。这些输入信号将作为阿克曼转向模块的输入,用于计算车辆的转向角度和轮胎转速。
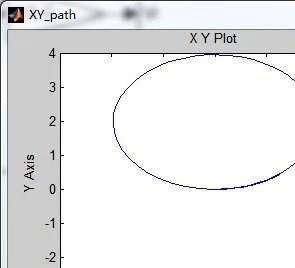
(5)运行仿真:配置完输入信号后,点击Simulink模型中的运行按钮,开始进行仿真。仿真结果将显示车辆的运动轨迹、转向角度等信息。
三、详细的建模过程说明文档
为了使读者更好地理解和应用本文介绍的建模方法,本文还提供了详细的建模过程说明文档。该文档将逐步讲解Simulink建模的各个环节,包括创建模型、配置车辆参数、添加阿克曼转向模块、配置输入信号等。读者可以按照文档的指导,一步一步地完成建模过程,从而更好地掌握Simulink建模技巧。
结论
本文基于阿克曼转向的车辆运动学模型在Simulink中建立了车辆运动学模型,并通过仿真验证了该模型的准确性。本文详细介绍了Simulink建模的流程和建模过程,提供了详细的建模过程说明文档。希望本文能为读者在路径规划和控制方面提供帮助,并使读者更好地理解和应用车辆运动学模型。
(以上文章仅供参考,具体内容和结构仍需要根据实际情况进行调整)
【相关代码,程序地址】:http://lanzoup.cn/702455641075.html


















 4226
4226

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









