







 EVO是一款用于SLAM系统精度评估的工具,支持计算绝对位姿误差(evo_ape)和相对位姿误差(evo_rpe)。通过命令行参数配置,可以进行对齐、画图、结果保存等操作。evo_config用于全局设置和配置文件管理,evo_traj用于轨迹管理和比较,evo_res则用于比较不同结果。
EVO是一款用于SLAM系统精度评估的工具,支持计算绝对位姿误差(evo_ape)和相对位姿误差(evo_rpe)。通过命令行参数配置,可以进行对齐、画图、结果保存等操作。evo_config用于全局设置和配置文件管理,evo_traj用于轨迹管理和比较,evo_res则用于比较不同结果。
evo工具github链接:link
evo_ape 计算绝对位姿误差
绝对位姿误差,常被用作绝对轨迹误差,比较估计轨迹和参考轨迹并计算整个轨迹的统计数据,适用于测试轨迹的全局一致性。
命令语法:命令 格式 参考轨迹 估计轨迹 [可选项]
其中格式包括euroc、tum等数据格式,可选项有对齐命令、画图、保存结果等。
常用命令示例:
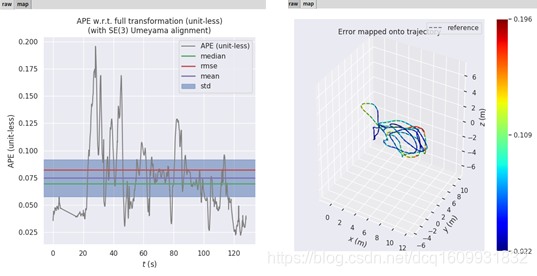
evo_ape euroc MH_data3.csv pose_graphloop.txt -r full -va --plot --plot_mode xyz --save_plot ./VINSplot --save_results ./VINS.zip
命令的含义为:计算考虑平移和旋转部分误差的ape,进行平移和旋转对齐,以详细模式显示,保存画图并保存计算结果。
命令运行后得到结果如下图所示
其中-r表示ape所基于的姿态关系
| -r/–pose_relation可选参数 | 含义 |
|---|---|
| full | 表示同时考虑旋转和平移误差得到的ape,无单位(unit-less) |
| trans_part | 考虑平移部分得到的ape,单位为m |
| rot_part | 考虑旋转部分得到的ape,无单位(unit-less) |
| angle_deg | 考虑旋转角得到的ape,单位°(deg) |
| angle_rad | 考虑旋转角得到的ape,单位弧度(rad) |
不添加-r/–pose_relation和可选项,则默认为trans_part。
-v表示verbose mode,详细模式,-a表示采用SE(3) Umeyama对齐,其余可选项如下表所示。不加-s表示默认尺度对齐参数为1.0,即不进行尺度对齐。
| 命令 | 含义 |
|---|---|
| –align/-a | 采用SE(3) Umeyama对齐,只处理平移和旋转 |
| –align --correct_scale/-as | 采用Sim(3) Umeyama对齐,同时处理平移旋转和尺度 |
| –correct_scale/-s | 仅对齐尺度 |
采用不同对齐命令效果图
 <
<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 9240
9240

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









