







 ABB机器人转数计数器更新仅影响电机旋转圈数,不影响零点位置,而微校则会改变零点位置,可能影响工艺焊道。在电机更换后,为确保零点准确性,可进行微校或联系售后重新标定。
ABB机器人转数计数器更新仅影响电机旋转圈数,不影响零点位置,而微校则会改变零点位置,可能影响工艺焊道。在电机更换后,为确保零点准确性,可进行微校或联系售后重新标定。
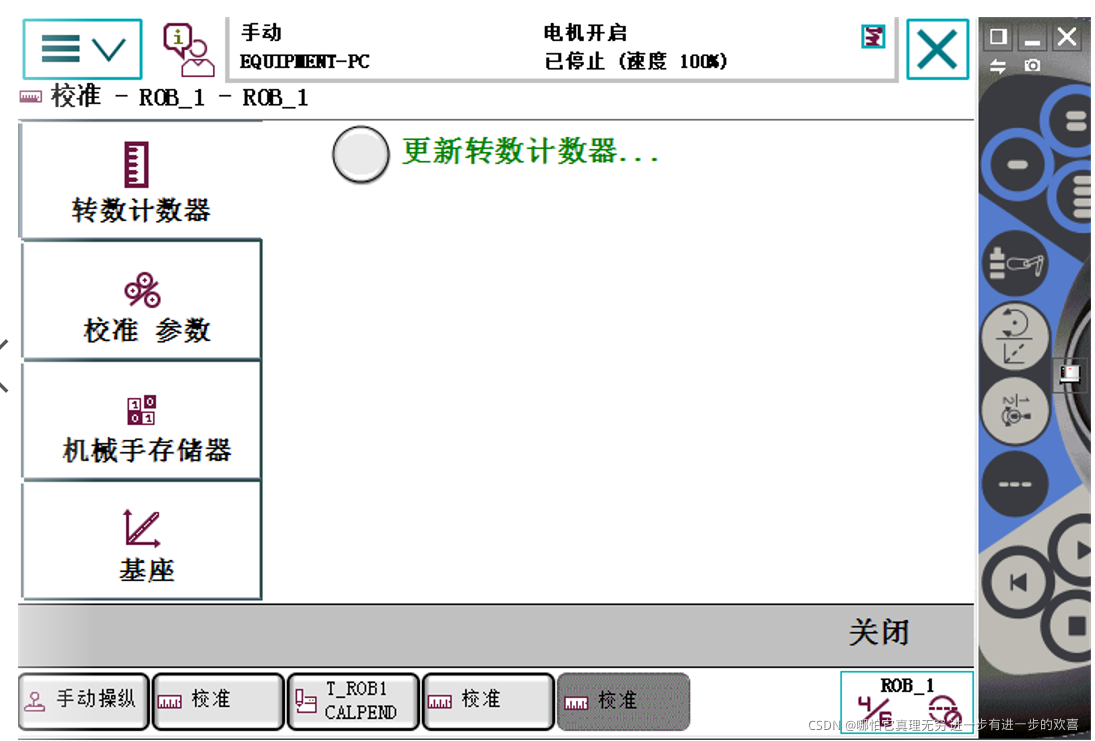
问题1:ABB机器人“转数计数器更新”和“微校”的区别?
- ABB机器人电机采用单圈值编码器,即电机转一圈,编码器能输出相应位置。但是由于减速比的缘故,实际机器人转180°,电机要转几十圈到几百圈不等(取决于减速比),当电机旋转超过一圈,旋转的圈数就通过机器人来计数(SMB板)。所有通常转数计数器丢失,SMB板电池没电或者更换SMB板后,此时,只是电机的旋转圈数丢失,零位的参考编码器值没有丢失。发生这种错误时,把相关轴移动到刻度线附近(肉眼允许有偏差),点击“更新转数计数器”即可,此时更新完后,示教器上各轴显示数据非零,而是此时机器人的位置(比如零点几度,由于肉眼对刻度造成的误差所致);以上操作,并没有改变机器人原有“真正”零位位置,也就是肉眼的误差不会影响机器人零位准确性,工艺也不需要重新校准焊道;

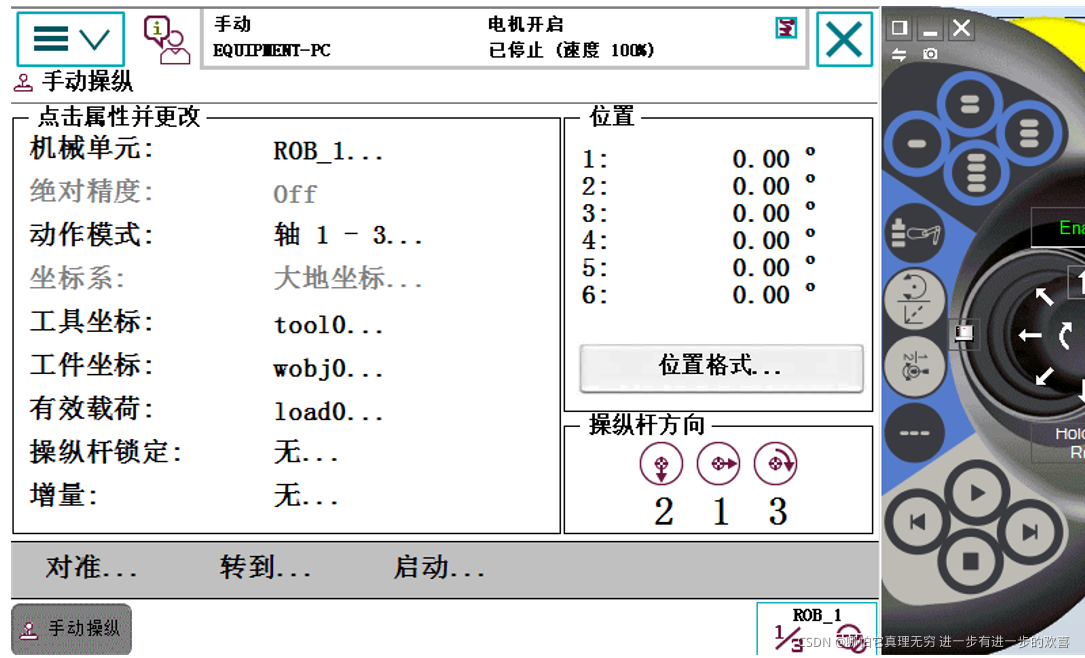
2)现场若发生电机更换在机器人电机拆装过后等(电机与本体装配关系发生变化),此时原有零位位置信息已经不准确(也就是本体银标签某个轴的数值已经不能代表真正零位信息)。
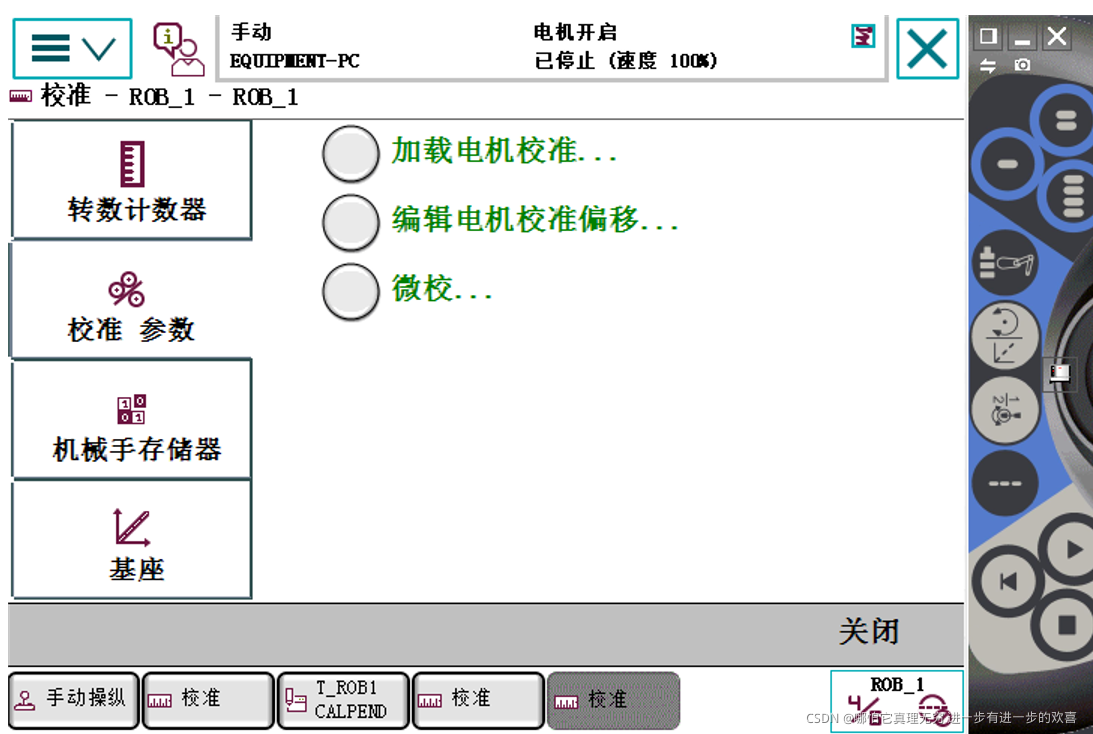
此时要保证零位的正确,可以联系ABB售后使用仪器来重新标定。如果现场要求不高,也可在机器人拆电机前移动到零位(示教器显示0),在对应轴画细线做标志,更换电机后,把该位置作为零位。如果做了上述的操作,可以点击下述页面的微校,此时校准后,该示教器上的轴数即显示为0.0,这种调整后会影响工艺的焊道;

















 3313
3313

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









