






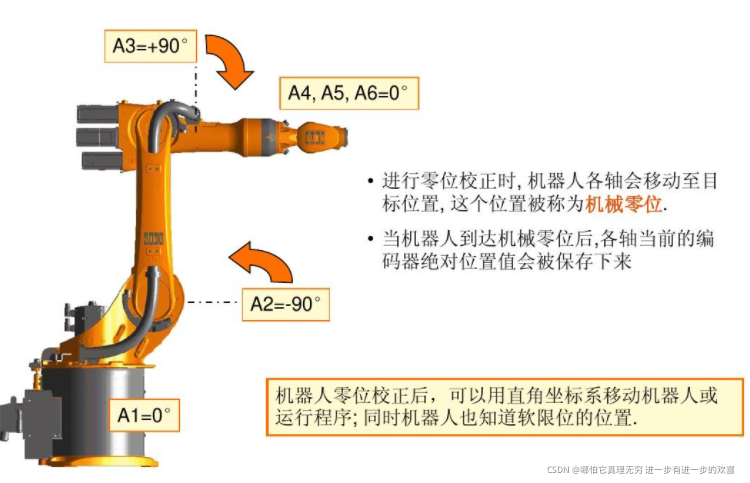
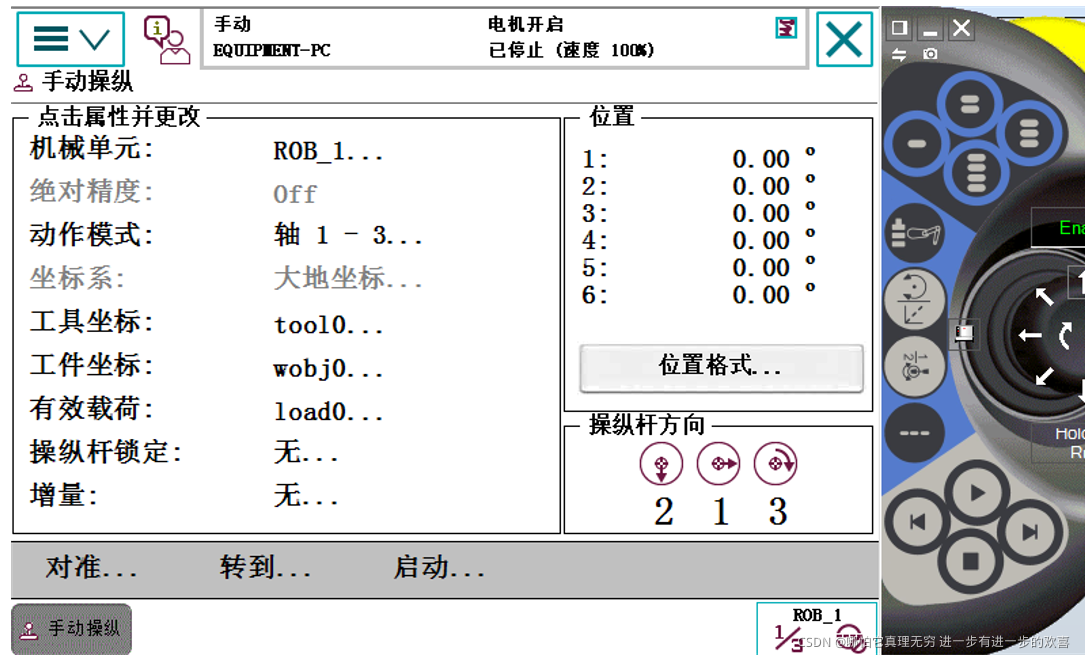
1、手动模式下,将机器人的1-6轴摇到机械零位,如下图机器人姿态;机器人1-6轴度数为0.0°;(如果示教器上示数因丢失不准,以实际的机械零位为准)
2、机器人控制柜断电,将机器人2轴处的焊枪编码线拆除,
使用梅花六角将护板的5个固定螺栓拆除,如下图

1、手动模式下,将机器人的1-6轴摇到机械零位,如下图机器人姿态;机器人1-6轴度数为0.0°;(如果示教器上示数因丢失不准,以实际的机械零位为准)
2、机器人控制柜断电,将机器人2轴处的焊枪编码线拆除,
使用梅花六角将护板的5个固定螺栓拆除,如下图

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1568
1568





