







关键词:Windows,QGC(QGroundControl)刷固件,slcan,convertdevice_xCAN_fw,candleLight_fw,CANable_MKS_fw,dronecan_gui_tool,DroneCAN/UAVCAN调试器,USB-CAN模块,Ardupilot,Px4,Pixhawk
Keyword:Using QGC (QGroundControl) to flash firmware,Windows,QGC(QGroundControl)update firmware,slcan,convertdevice_xCAN_fw,candleLight_fw,CANable_MKS_fw,dronecan_gui_tool,DroneCAN/UAVCAN Debugger,USB-CAN Convertor,Ardupilot,Px4,Pixhawk
Ключевые слова:Изменение прошивки с помощью QGC(QGroundControl),Windows,QGC(QGroundControl)обновить прошивку,slcan,convertdevice_xCAN_fw,candleLight_fw,CANable_MKS_fw,dronecan_gui_tool,Отладчик DroneCAN/UAVCAN,Конвертер USB-CAN,Ardupilot,Px4,Pixhawk
哈喽大家好,我是Mokel,这是DroneCAN调试器视频的第5期,这期视频我们将介绍使用QGroundControl软件刷新Pogo-DroneCAN调试器固件的内容,你可以在http://qgroundcontrol.com/官网下载最新版本的QGroundControl软件。
在前几期视频中有提到,我们使用的DroneCAN调试器,Pogo官方提供了几种不同的固件,分别是slcan、convertdevice_xCAN_fw、candleLight_fw、CANable_MKS_fw,其中slcan是我们过去几期视频中一直使用的固件,它的核心就是slcan协议,经过Pogo官方针对Pogo-DroneCAN调试器的适配处理后,使用该固件能够在Windows、Ubuntu/Linux 和 WSL2下完美地将DroneCAN调试器连接到dronecan_gui_tool上位机,以及使用can-utils工具集操作socketCAN与DroneCAN调试器交互;此外你还可以根据你的需求将其他三种CAN协议固件刷到Pogo-DroneCAN调试器中用于你的开发调试工作。
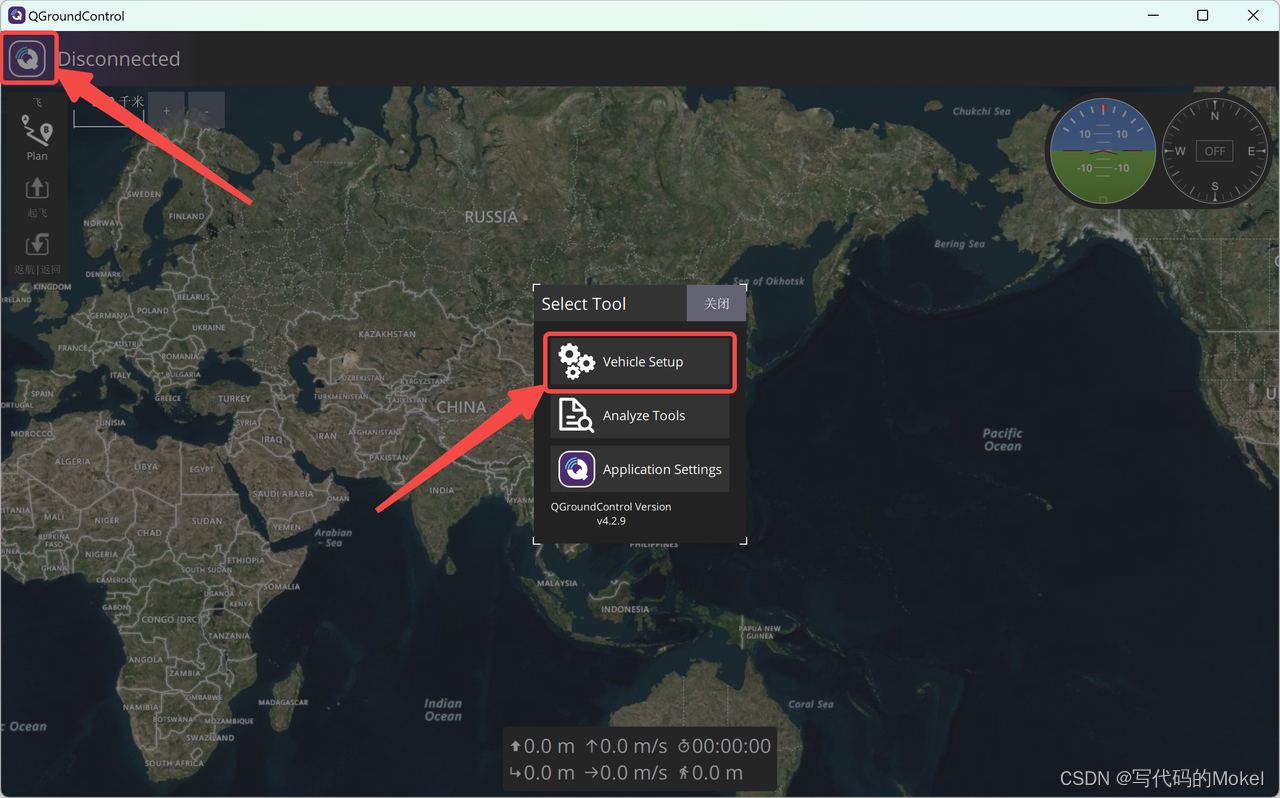
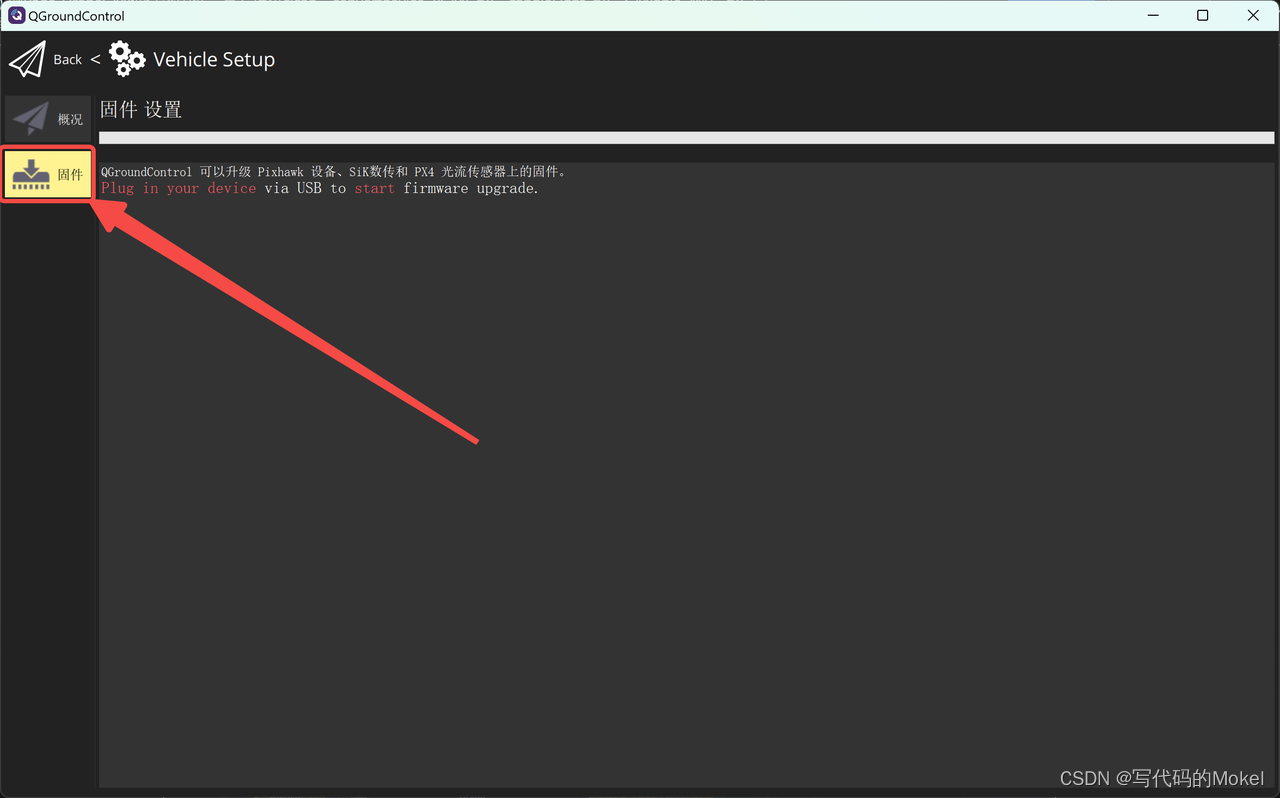
接下来,我们演示一下如何使用QGroundControl软件刷新Pogo-DroneCAN调试器固件,操作过程还是非常简单的。首先打开QGroundControl软件,然后点击左上角的软件Logo,软件会弹出Select Tool浮窗,在其中单机选择Vehicle Setup,进入到该窗口,在左侧边栏点击固件切换到固件页面。
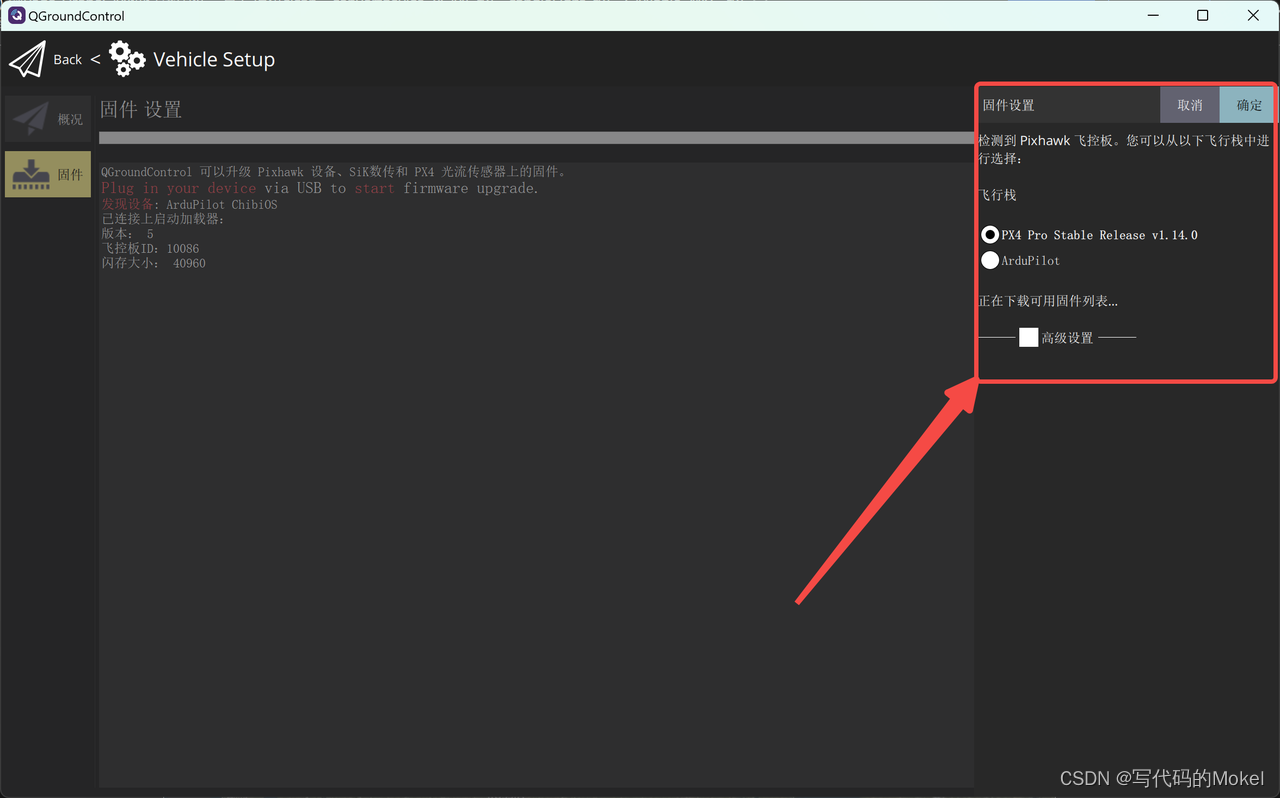
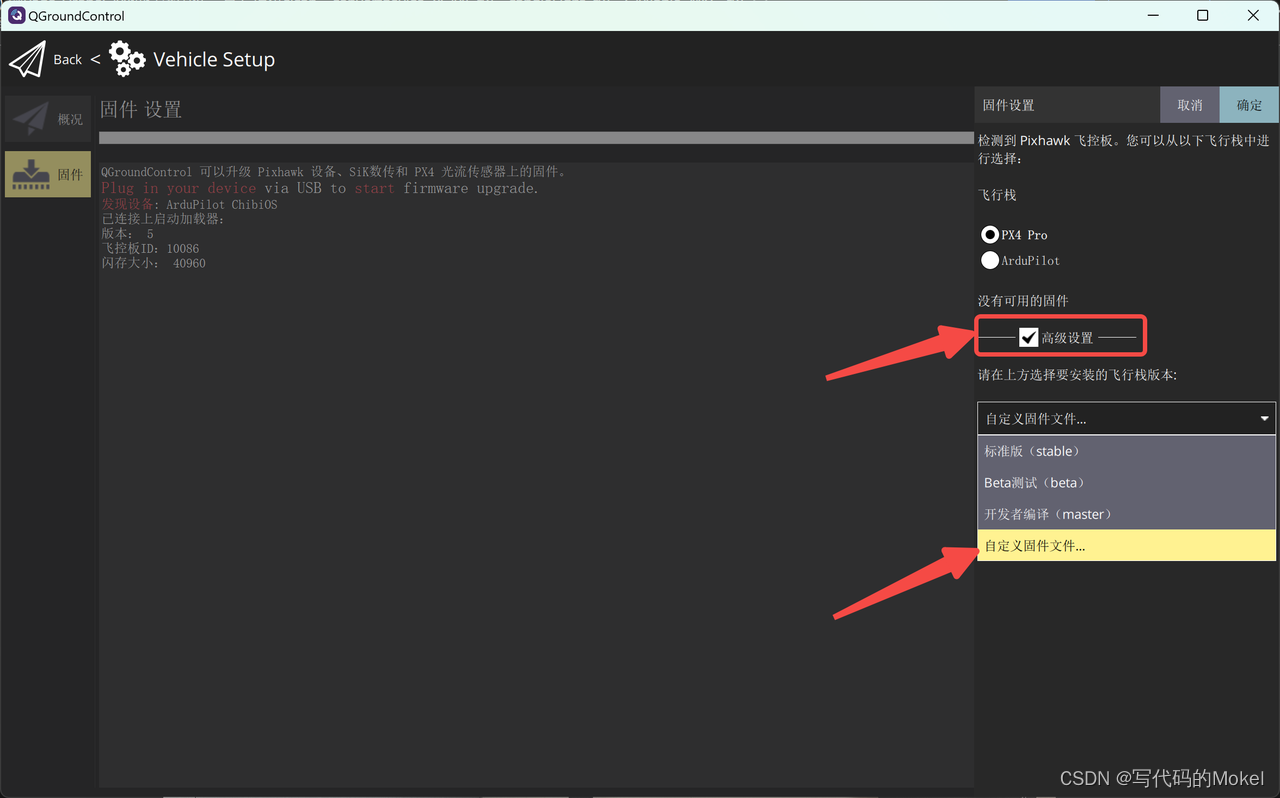
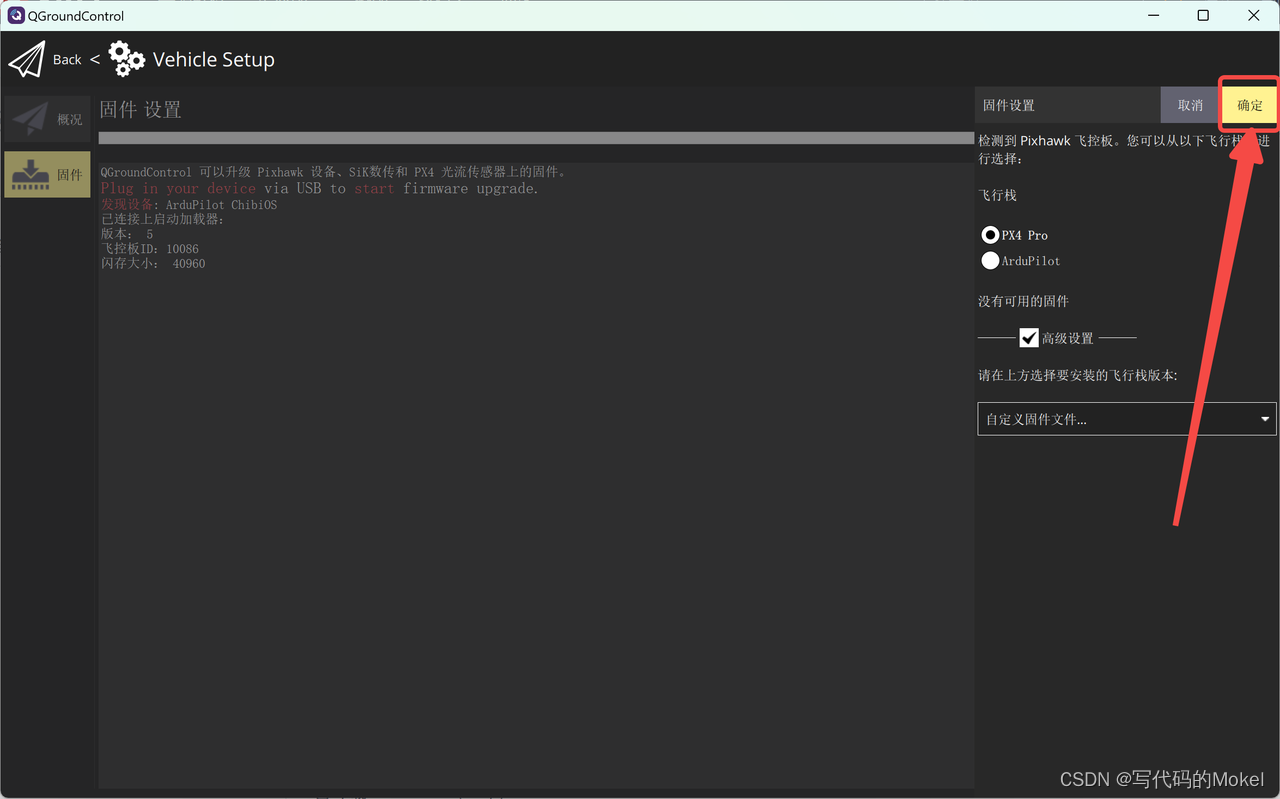
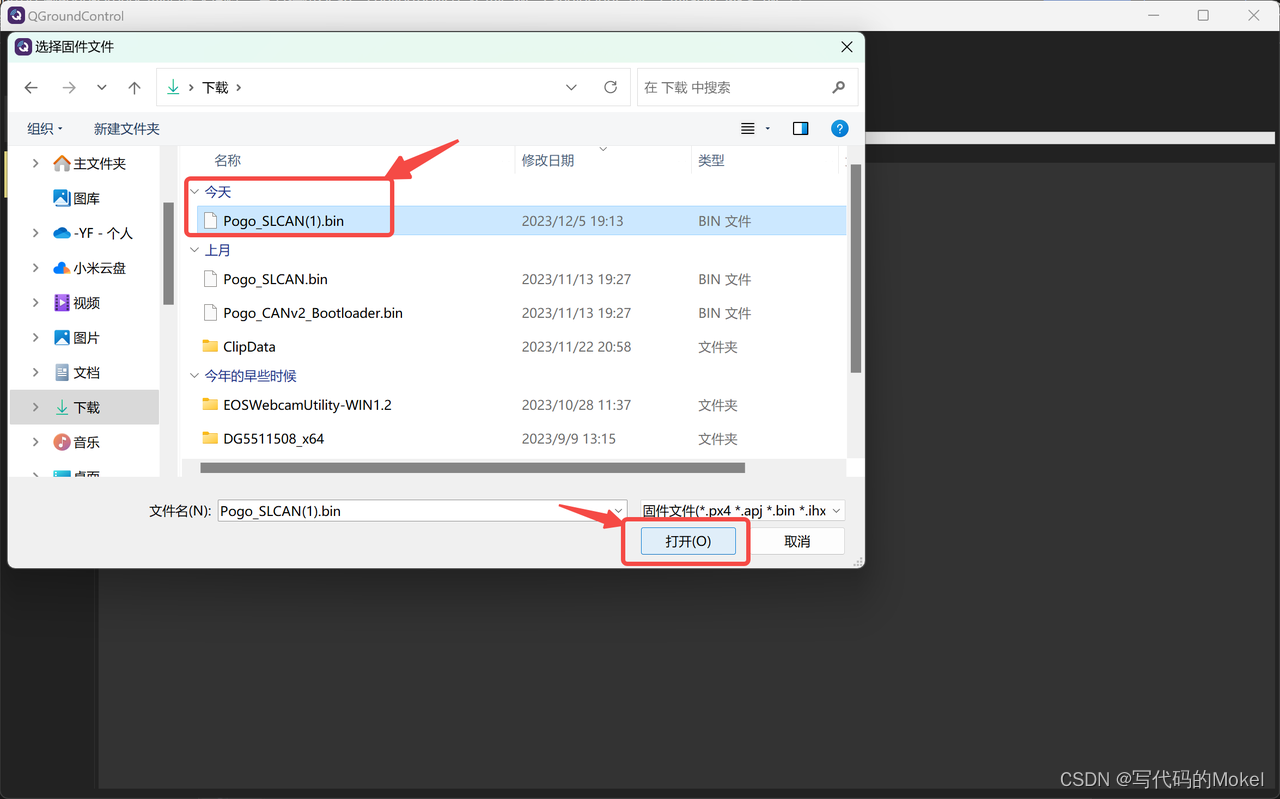
此时再将DroneCAN调试器通过TypeC线连接到电脑,然后QGroundControl会在右侧弹出固件设置浮窗,此时DroneCAN调试器的一个呼吸灯持续闪烁;先勾选高级设置,然后下方会出现一个选择飞行栈版本选择框,将其选择为自定义固件文件,然后点击右上角确认按钮,在弹出的文件选择器中选中需要刷新到调试器的固件,在这里我以slcan固件为例,然后点击打开按钮。

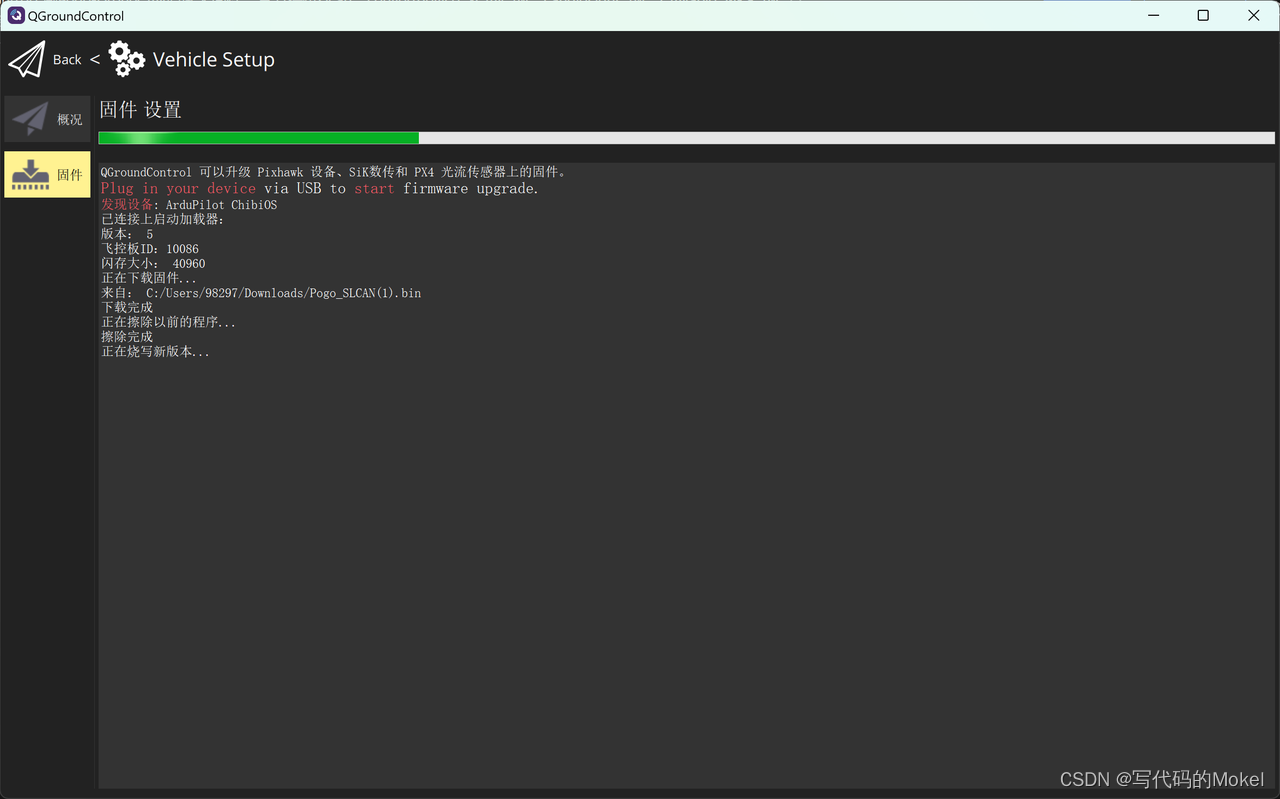
可以看到,QGroundControl软件正在将slcan固件更新到DroneCAN调试器中,固件输入的速度还是很快的,一会儿就完成了;需要注意的时,在固件刷新的过程中,QGroundControl可能会抛出写入失败的错误,此时你需要关闭QGroundControl软件,并从电脑上拔下DroneCAN调试器,然后再重新打开QGroundControl软件重复上述过程,基本就不再会报错;如果还有是写入失败的话,你可以多重复几次,目前我还没有遇到DroneCAN调试器无法刷新固件的问题,如果你们遇到了相关问题,可以找Pogo官方客服反馈。

完成固件的更新后,可以看到DroneCAN调试器的呼吸灯保持常亮状态,此状态表示固件成功写入到DroneCAN调试器了,那么你就可以继续其他开发调试工作了。

那么这期视频就到这里了,记得点赞投币收藏和关注,我们下期视频,不见不散!

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









