







 本文深入探讨了智能手机中的RGB + Depth技术,重点解析了TOF(飞行时间)深度相机的工作原理。TOF相机通过测量光脉冲的飞行时间来获取物体距离,常见于高端智能手机。文章介绍了TOF相机的组成、测距原理、影响因素以及与双目视觉、结构光的比较,展望了手势识别、AR游戏、三维空间测量等应用前景。
本文深入探讨了智能手机中的RGB + Depth技术,重点解析了TOF(飞行时间)深度相机的工作原理。TOF相机通过测量光脉冲的飞行时间来获取物体距离,常见于高端智能手机。文章介绍了TOF相机的组成、测距原理、影响因素以及与双目视觉、结构光的比较,展望了手势识别、AR游戏、三维空间测量等应用前景。
本篇博客已首发在博主个人微信公共号:计算机视觉life(微信号:CV_life)
本篇来探讨一下智能手机摄像头中:普通彩色相机(RGB) + 深度相机(Depth)的技术原理。
首先来解释一下什么是深度相机吧。
深度相机
顾名思义,深度相机就是可以直接获取场景中物体距离摄像头物理距离的相机。根据原理不同,主要有飞行时间(TOF)、结构光、激光扫描几种方式(注:有些地方将双目立体视觉相机也列为深度相机的一种,它是单纯依靠算法计算得到的深度信息)。目前使用较多的是TOF相机。目前主流的TOF相机厂商有PMD、MESA、Optrima、微软等几家,其中MESA在科研领域使用较多;PMD是唯一在室内/外都能使用的TOF相机厂商,多用于科研、工业等各种场合;Optrima、微软则主要面向家庭、娱乐应用,价位较低。
因为TOF相机使用的较为广泛,在此主要介绍一下TOF相机的原理。
TOF相机
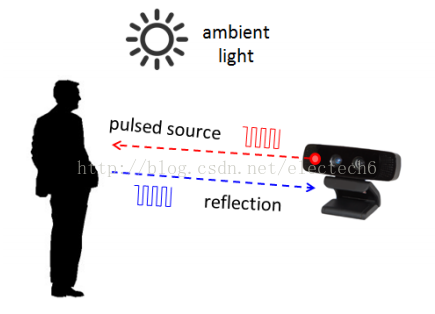
TOF(Time of flight)直译为“飞行时间”。其测距原理是通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离。这种技术跟3D激光传感器原理基本类似,只不过3D激光传感器是逐点扫描,而TOF相机则是同时得到整幅图像的深度(距离)信息。
TOF组成
TOF相机采用主动光探测,通常包括以下几个部分:
1、照射单元
照射单元需要对光源进行脉冲调制之后再进行发射,调制的光脉冲频率可以高达100MHz。因此,在图像拍摄过程中,光源会打开和关闭几千次。各个光脉冲只有几纳秒的时长。相机的曝光时间参数决定了每次成像的脉冲数。
要实现精确测量,必须精确地控制光脉冲,使其具有完全相同的持续时间、上升时间和下降时间。因为即使很小的只是一纳秒的偏差即可产生高达15 c m的距离测量误差。
如此高的调制频率和精度只有采用精良的LED或激光二极管才能实现。
一般照射光源都是采用人眼不可见的红外光源。
2、光学透镜
用于汇聚反射光线,在光学传感器上成像。不过与普通光学镜头不同的是这里需要加一个带通滤光片来保证只有与照明光源波长相同的光才能进入。这样做的目的是抑制非相干光源减少噪声,同时防止感光传感器因外部光线干扰而过度曝光。
3、成像传感器
是TOF的相机的核心。该传感器结构与普通图像传感器类似,但比图像传感器更复杂,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 9064
9064

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









