






点击蓝字,一键连接过去~~
(@转载请注明出处@)
| 智能底盘 | 感知与融合 | 规划与控制 | 嵌入硬件 |
|---|---|---|---|
| 自动驾驶底盘详解 | 多传感器融合详解 | 自动驾驶汽车的规划与控制(介绍) | 汽车电子控制单元(ECU)的架构—DCU和MDC域控制器 |
| 汽车各种控制器VCU、TCU、SCU、INS、MFS、BCM、IKEY、ESC、EPS、ESP、EPB、SAS等 |
| Docker | 配准算法 | CAN | 自动驾驶名词解释 |
|---|---|---|---|
| 只要一小时,零基础入门Docker | PCL中的点云配准(Registration)ICP算法 | 自动驾驶(45)—汽车标定-XCP简述 XCP协议基础知识 - 协议层 | ADAS中的LDW、FCW、BSD、LCA、ACC、AEB、APA、DMS代表的含义 AVM环视 |
| 无人驾驶汽车系统入门(十三)——正态分布变换(NDT)配准与无人车定位 |
宇通无人驾驶大客车软件系统架构

无人驾驶汽车硬件连接图

| 自动驾驶中计算机视觉研究 | 解释说明 |
|---|---|
| 控制模块 | 此模块用于控制汽车的速度、转向、刹车行为,靠线控执行器(方向盘线控、油门与制动线控、档位线控) |
| 决策模块 | 无人车一般选用工业环境下的计算机——工控机。该模块用于根据汽车所处的环境决策出汽车下一步需要采取的运动方式,该模块需要依赖GPS系统及计算机视觉系统,GPS系统用于对汽车运动的路径作全局规划,而计算机视觉系统则主要根据路况实时调整汽车行驶策略 |
| 目标检测 | |
| 感知模块 | 该模块分为环境感知和车辆定位 |
| 环境感知:动态目标检测(车辆、行人和非机动车)、静态物体识别(交通标志和红绿灯)、可行驶区域的分割(道路区域和车道线)。这里需要用到的主要是各种传感器(比如摄像头,激光雷达,毫米波雷达等)。 | |
| 摄像头适用于目标分类 | |
| 激光雷达适用于近距的目标检测和测距 | |
| 感知算法要完成两个主要的任务:物体检测和语义分割 | |
| 车辆定位则根据环境感知得到的信息来确定车辆在环境中所处位置,这里需要高精度地图,以及惯性导航(IMU)和全球定位系统(GPS)的辅助 | |
如下图所示,在一个控制周期内,传感器负责感知周围环境及自身状态,计算机中的软件系统负责环境建模、决策与规划,执行器负责执行指令并反馈结果。控制周期一般为毫秒级,由多种传感器采样频率、软件算法复杂度、计算机性能以及执行器频率决定。控制周期不能太长,太长则不能对突发情况进行及时处理,也不能太短,太短则会造成计算及执行器负载过高。正常人类驾驶员的反应时间为0.2秒左右,宇通无人驾驶大客车的控制周期为50毫秒,可以满足城市工况高速行驶要求。

| 传感器名称 | 传感器原理 | 具体分类 | ||
|---|---|---|---|---|
| 毫米波雷达 | 毫米波雷达原理介绍 , 在车载毫米波雷达中,目前主要有三种调制方案:调频连续波(Frequency Modulated Continuous Wave, FMCW)(常用),频移键控(Frequency Shift Keying, FSK)以及相移键控(Phase Shift Keying, PSK)。Fmcw毫米波雷达原理 。自动驾驶感知——毫米波雷达。 | 3D毫米波雷达,具有3个维度的信息,分别是距离、速度、方位角,不含有高度信息。 | 距离检测 | 通过计算经过调制的连续调频FMCW信号与回波之间的频率差来计算距离,雷达发射FMCW电磁波,速度为光速。 |
| 速度检测 | 通过多普勒效应探测目标与自车的相对运动速度,如需要目标绝对运动速度,则需要整车提供自车运动速度信息输入进行补偿得到。 | |||
| 方位角探测 | 通过相位法测角原理,利用不同接收天线阵元间接收回波的相位差计算方位角。 | |||
| 激光雷达 | 激光雷达是集激光、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通雷达,激光雷达具有分辨率高,隐蔽性好、抗干扰能力更强等优势。从功能模块可以把激光雷达分为激光器、扫描部件、感光芯片三部分。根据激光雷达扫描部分有无运动部件将其分类为机械式、半固态、纯固态三种类型的激光雷达是我们最为熟知的分类方法。 | 工作原理: | 测距原理 | 1、三角测距; 2、TOF测距 |
| 扫描原理 | ||||
| IMU | IMU 惯性测量单元(Inertial Measurement Unit) 是测量物体三轴角速度和加速度的设备。 一文了解IMU原理、误差模型、标定、惯性传感器选型以及IMU产品调研(含IMU、AHRS、VRU和INS区别) 。加速度计标定,陀螺仪标定 | 加速度计 | 加速度计的本质是检测力而非加速度,即加速度计的检测装置捕获的是引起加速度的惯性力,随后可利用牛顿第二定律获得加速度值。测量原理可以用一个简单的质量块、弹簧和指示计来表示。加速度计测量值 a m a_m am = f m \frac{f}{m} mf = a − g a − g a−g 为弹簧拉力对应的加速度, f f f 弹簧拉力, a a a 物体在惯性系统下的加速度, g g g 为重力加速度。加速度计利用电容或者电阻桥等原理测量 a m a_m am。加速度计采用“东北天”坐标系(ENU)。根据传感器敏感元件的不同,常见的加速度传感器包括电容式、电感式、应变式、压阻式、压电式等。 | |
| 陀螺仪 | 当一个质点相对于惯性系做直线运动时,因为质点自身惯性,它相对于旋转体系,其轨迹是一条曲线。立足于旋转体系,我们认为有一个力驱使质点运动轨迹形成曲线。 | |||
| 磁力计 | 磁力计是利用地磁场来定北极的一种器件。磁力计能提供装置在XYZ各轴所承受磁场的数据,接着相关数据会汇入微控制器的运算器,以提供磁北极相关的航向角,利用这些信息可侦测地理方位。磁力计是采用三个互相垂直的磁阻传感器,每个轴向上的传感器检测在该方向上的地磁场强度。 | |||
| 误差模型(加速度计和陀螺仪的误差) | 确定性误差 | 确定性误差可以事先标定确定,一般情况下,使用六面法标定确定性误差,包括:Bias、Scale、非正交误差。Bias: 理论上,当没有外部作用时,IMU 传感器的输出应该为0。但是,实际数据存在一个偏置b。Scale: scale 可以看成是实际数值和传感器输出值之间的比值(电信号到模拟信号,单位不同会通过一个 scale 的转化,这个 scale 会存在误差)。非正交误差: 多轴 IMU 传感器制作的时候,由于制作工艺的问题,会使得xyz轴可能不垂直。 | ||
| 随机误差 | 随机误差通常假设噪声服从高斯分布,随机性误差常用的Allan方差法进行标定,包括:高斯白噪声,bias随机游走(零偏Bias)。高斯白噪声: 测量噪声是AD转换器件引起的外部噪声,波动激烈的测量白噪声。随机游走(零偏Bias):随机游走噪声 是传感器内部机械、温度等各种物理因素产生的传感器内部误差的综合参数,是变化缓慢的bias。 | |||
4D毫米波雷达产业上下游梳理
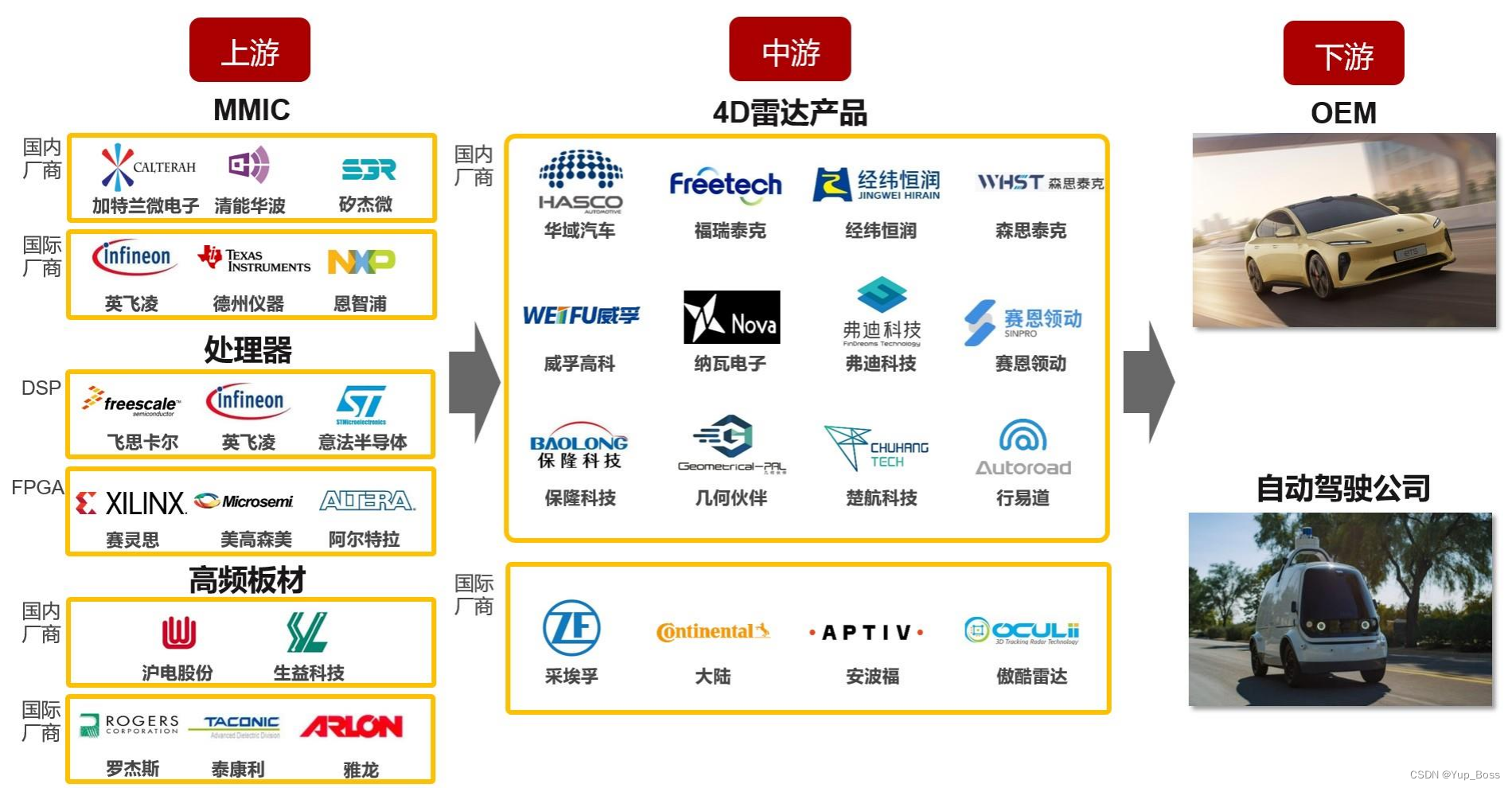
4D毫米波雷达有望在中低端车型上占领激光雷达降本后的生态位,配合摄像头及传统毫米波雷达形成一套高性价比的智能驾驶硬件组合。建议关注4D毫米波雷达整机相关标的公司:华域汽车、经纬恒润、保隆科技、威孚高科。上游产业链建议关注标的公司:沪电股份、生益科技。















 2269
2269











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









