






前言
本文是东平西凑来的
##参考了以下几篇博客:
https://blog.csdn.net/ck784101777/article/details/108229534
https://blog.csdn.net/So____/article/details/129566492
https://blog.csdn.net/weixin_44570248/article/details/118463199
https://blog.csdn.net/qq_33971022/article/details/109013661
原文链接:https://blog.csdn.net/yz2630570484/article/details/132685103
省流助手:unity报错先检查路径是否有中文!!!!
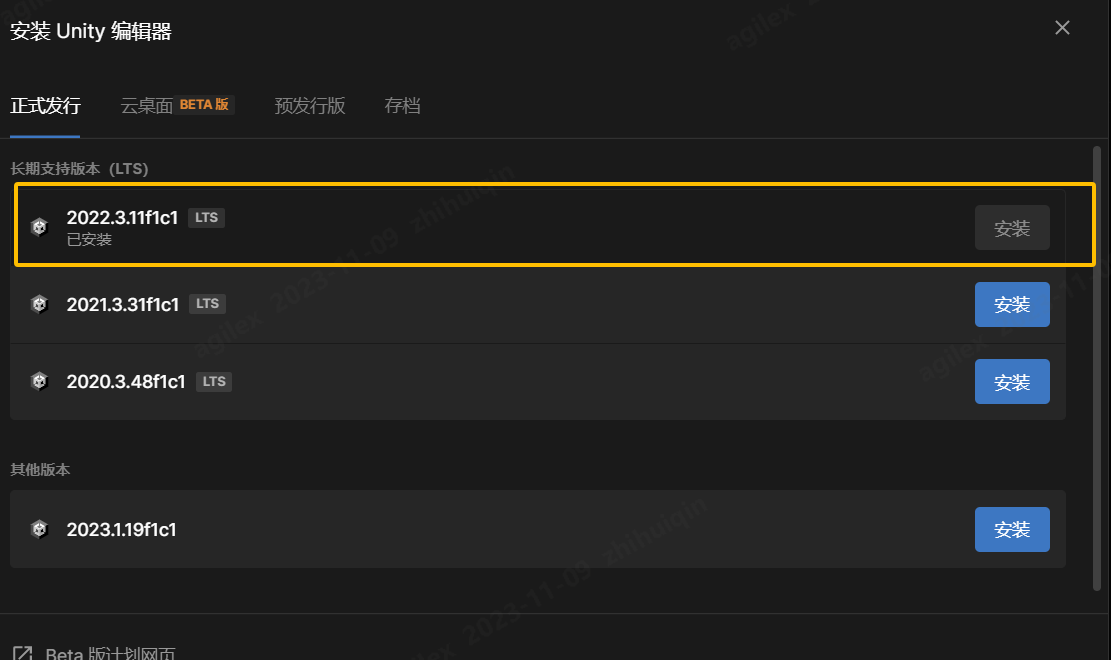
1.安装Unity
在win10系统下登录Unity官网下载相应的版本https://unity.cn/releases,这里最好是Unity Hub和Unity都在官网下载好相应的包,如下图:(本教程使用的是2022的版本)
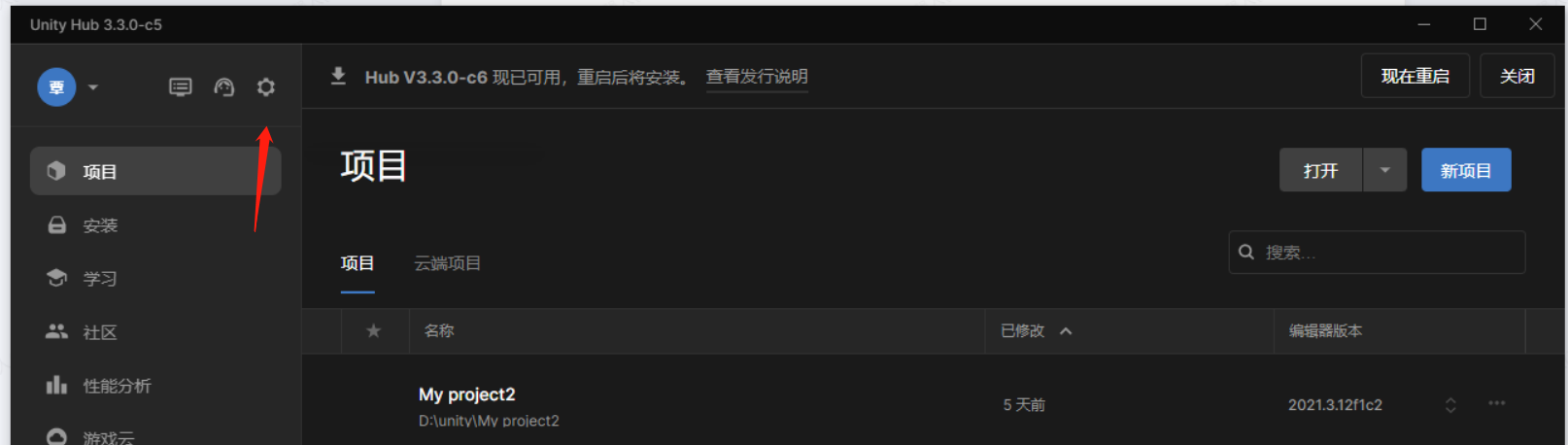
2. 配置基本信息
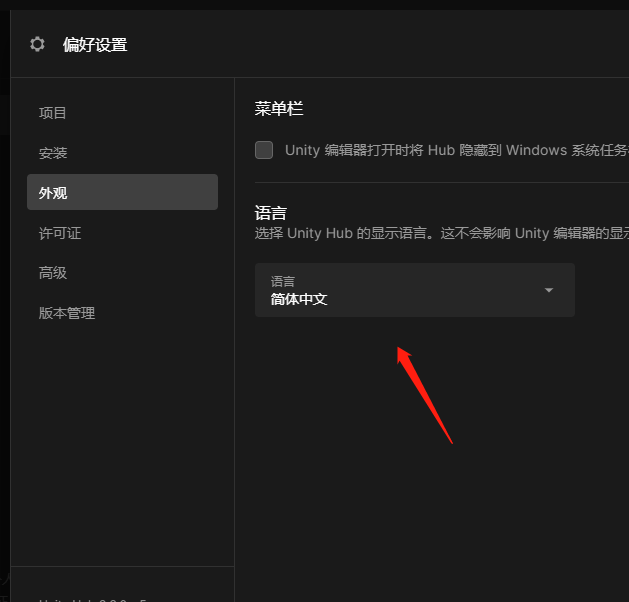
修改语言,将语言设置为中文
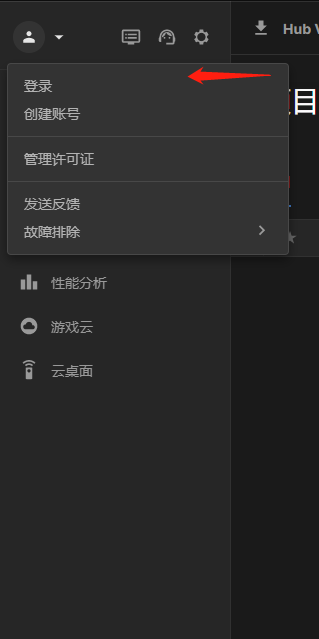
用微信登录激活个人版的即可使用
3.导入autoware map tools工具
注意:功能包文件夹路径不能有中文
(1)解压提供的autoware map tools。
(2)创建项目:项目->新建->3D->创建

(3)将autoware map tools导入unity
首先点击window选项,再点击package manager。

先点击左上角“+”,再点击Add package from disk。
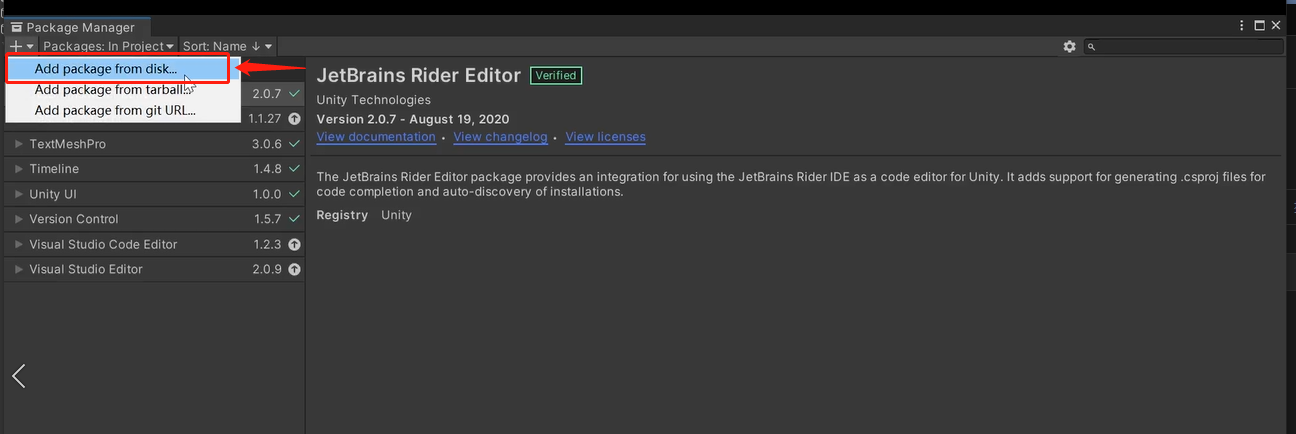
接着选择MapToolbox-master文件夹中的package.json,工具包就会自动导入。

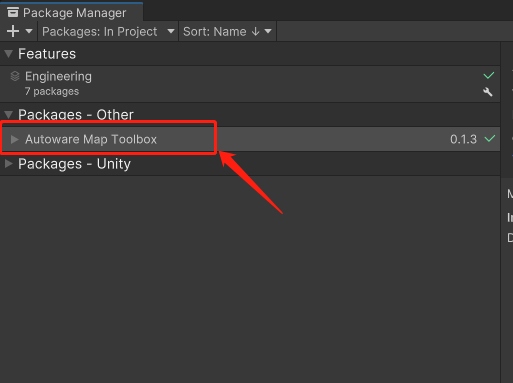
导入完成后可以看到Autoware Map Toolbox。
导入后可能会提示错误,在下方提示:
Library\PackageCache\com.unity.jobs@0.2.10-preview.13\Unity.Jobs\IJobParallelForDefer.cs(73,85): error CS8377: The type 'U' must be a non-nullable value type, along with all fields at any level of nesting, in order to use it as parameter 'T' in the generic type or method 'NativeList<T>'
原文链接:https://blog.csdn.net/hubiao1235/article/details/126369289解决方法:
打开Package Manager包管理器
在Unity的界面,点击Window选项中的Package Manager,并且点击加号中的 "Add package from git URL..." ,add packages “com.unity.entities”。
注意:
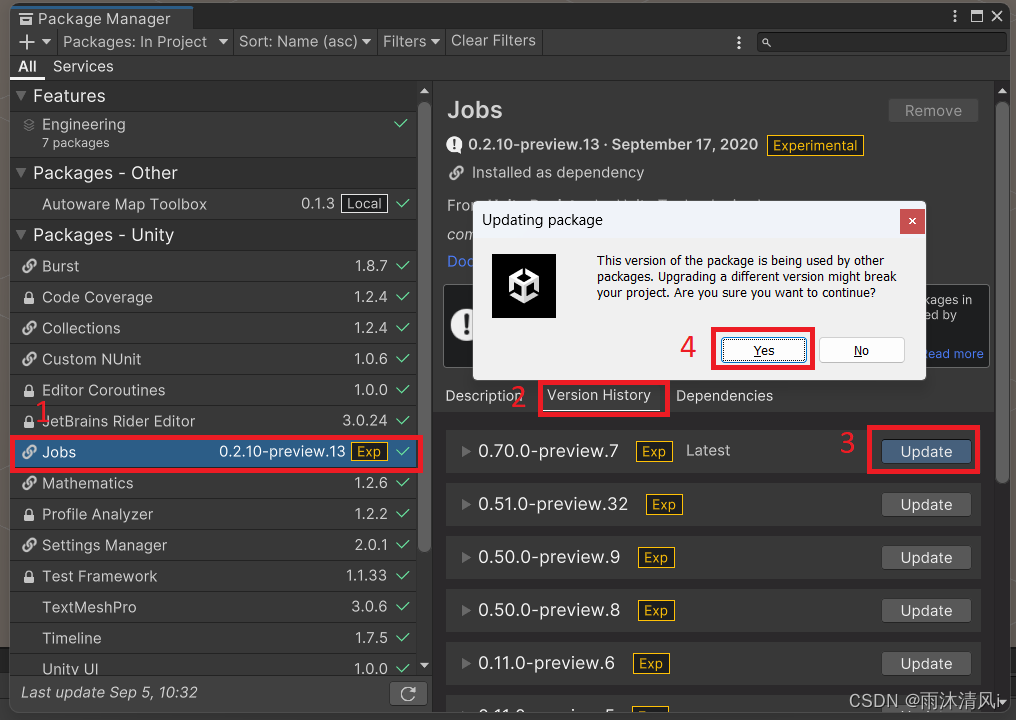
导入插件之后单击右键没有出现Autoware----AutowareADASMap工具包,后发现在导入完插件后报错:
Library\PackageCache\com.unity.jobs@0.2.10-preview.13\Editor\*******\:error在Window----Package Manager中找到Jobs----Version History----Updata更新,就能添加Autoware----AutowareADASMap工具包啦。
3. 画车道线
3.1 道路两边的白线
(1)移动地图文件
把地图文件放到刚刚创建的New Unity Project 3/Assets文件夹;注意路径中不能有中文。
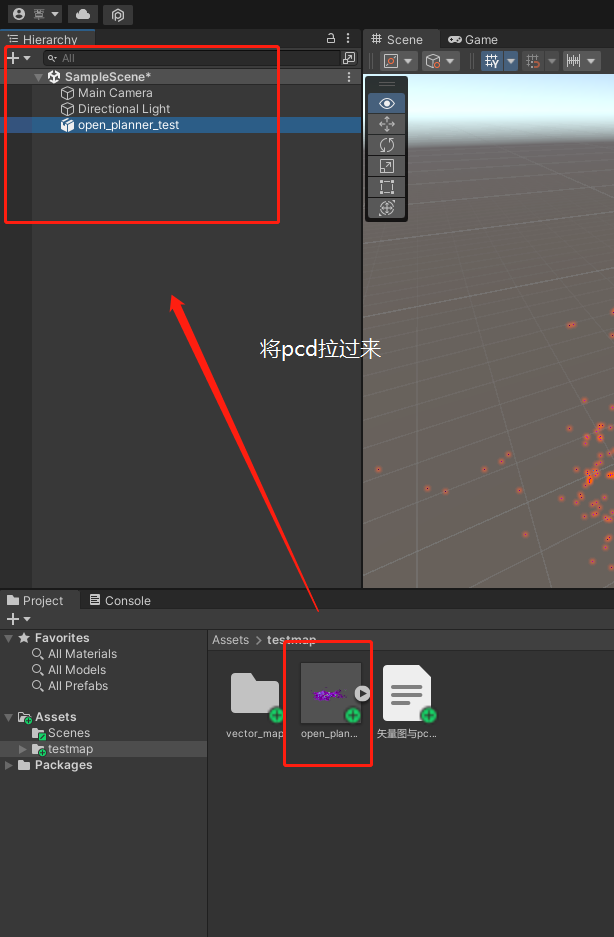
然后将PCD地图文件拖到SampleScene中打开。
(2)锁定旋转轴
点击y轴,然后点旁边的锁键来锁定视角。

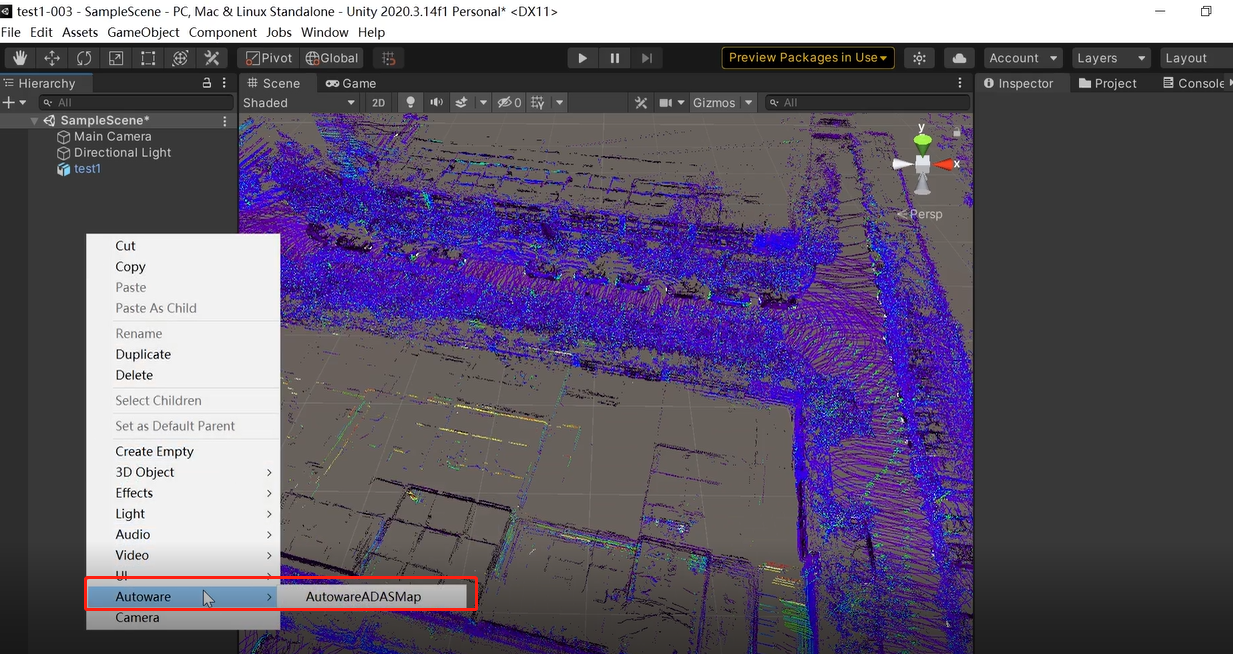
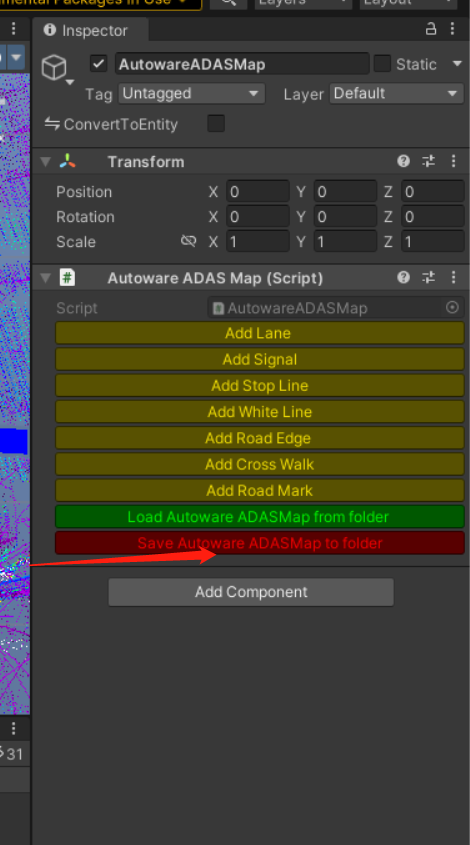
(3)新建Autoware adasmap
首先右键添加Autoware工具箱。
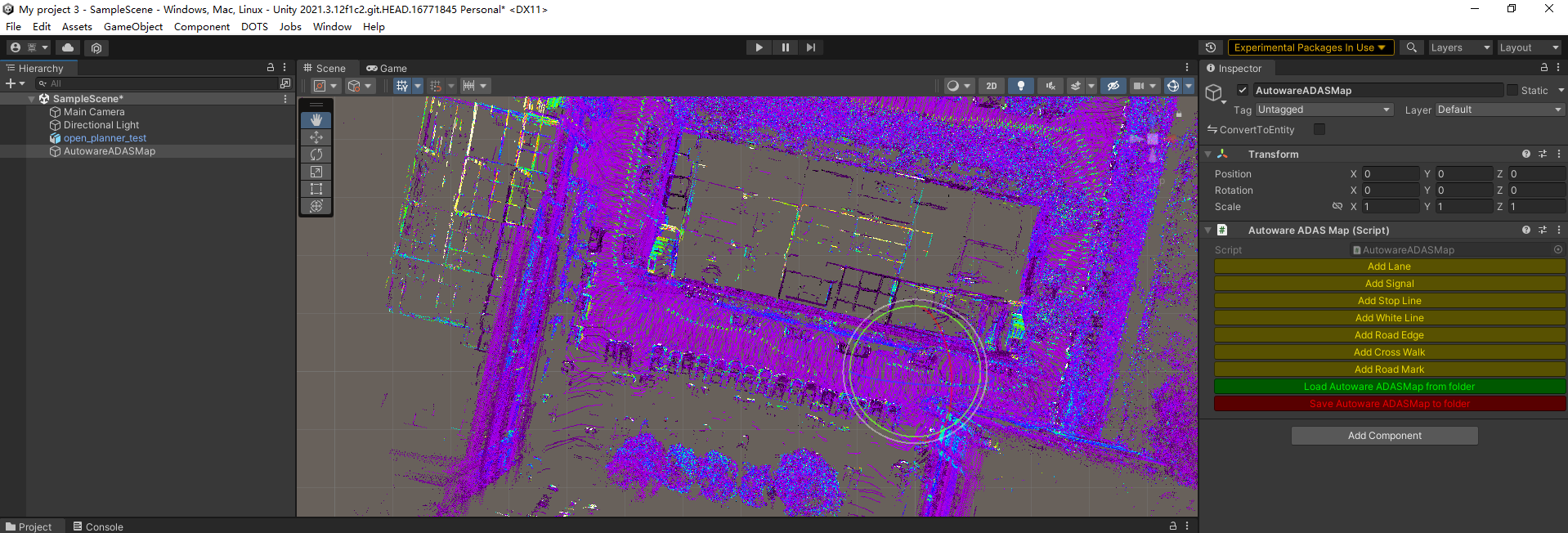
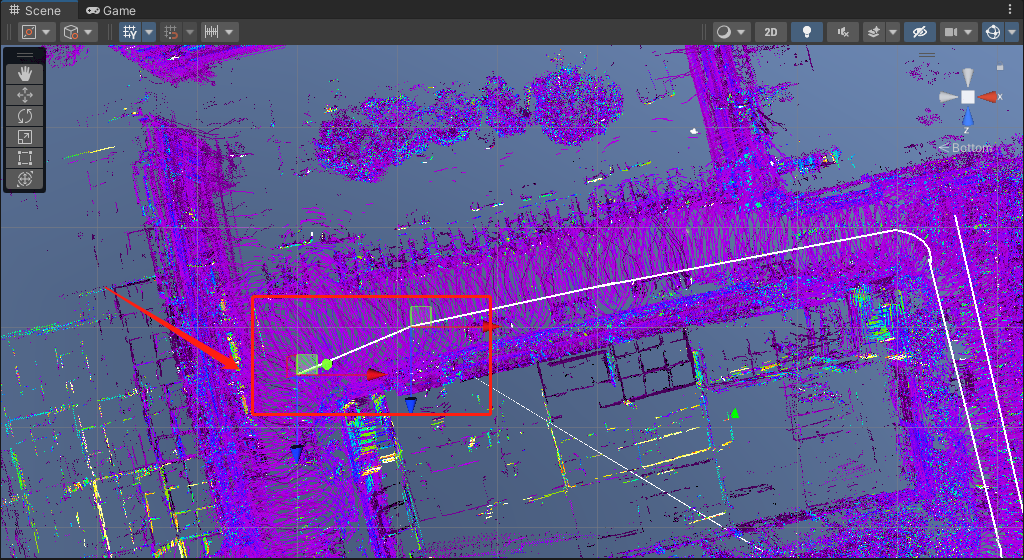
(4)添加白线
选择add White line,画一条白线,用于标志车道两旁。
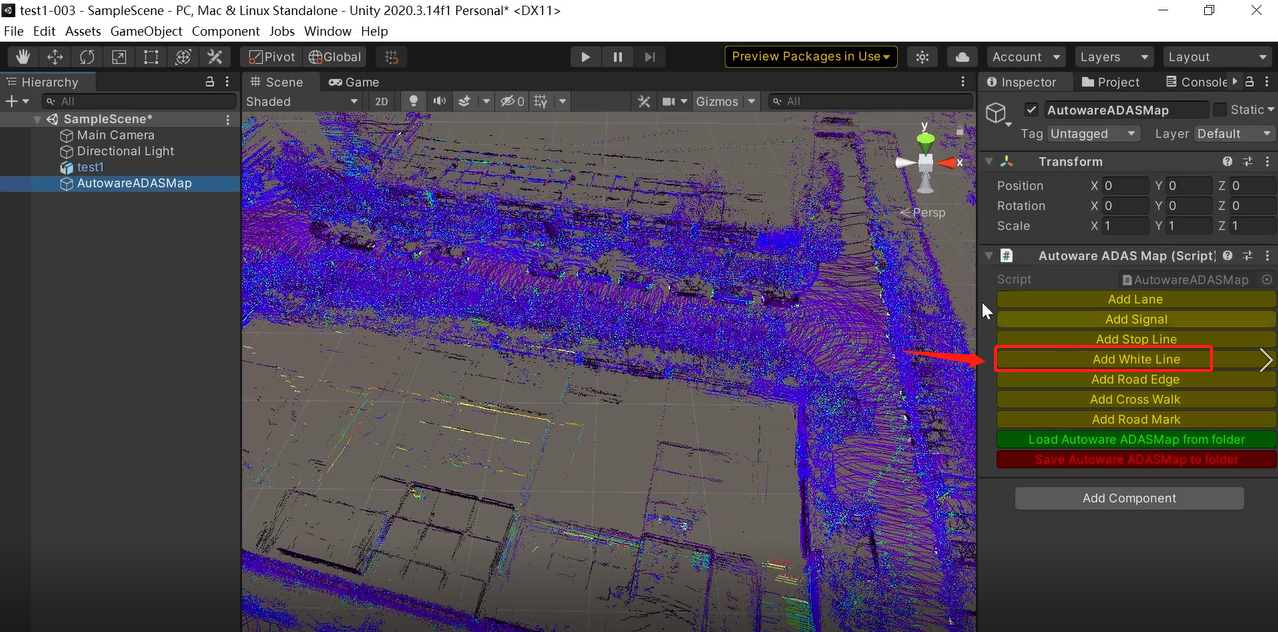
移动方框,会挪动线段起点和终点。
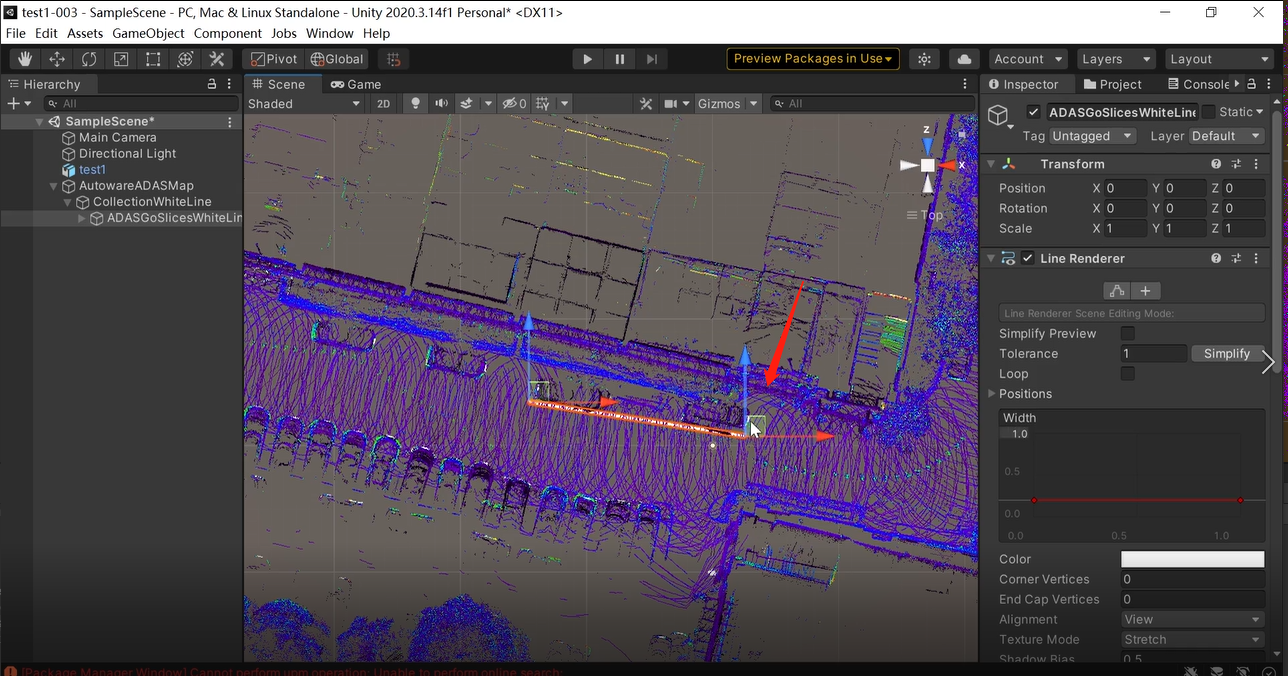
(5)白线延长和弯曲
点击左侧ADASGoSlicesWhiteLine展开,点击ADASGoWhiteLine。
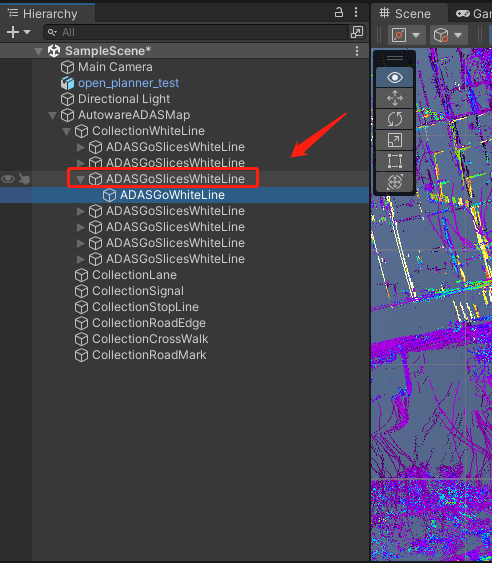
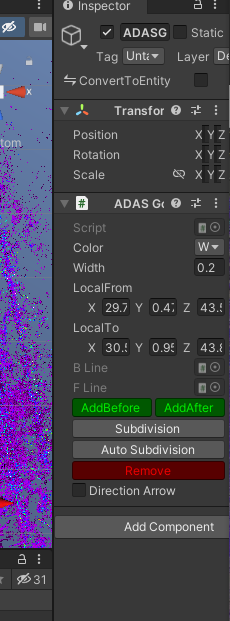
点击右侧AddAfter,在后方添加一个点,挪动方块以延长线段。
点击右侧AddBefore,在前方添加一个点,挪动方块以延长线段。
点击AddBefore后,如下图所示,会新增一个方块,挪动就可以拉长线段:
线段弯曲:点击Subdivision,会出现2个小方块,移动小方块调整曲线弯曲程度,选择normal way,完成曲线。

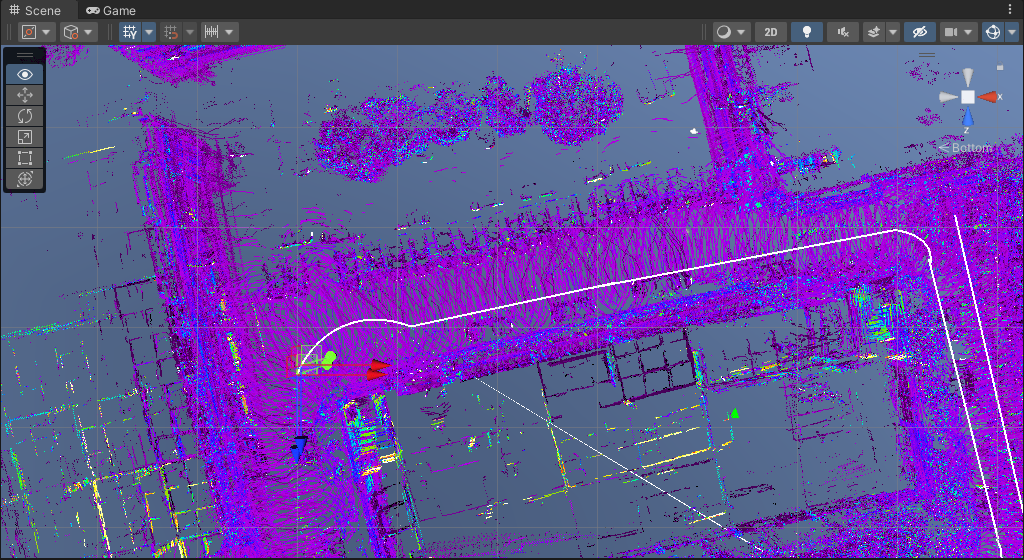
注意:不画曲线也要对线段进行“Subdivision”,选择normal way,完成曲线。
3.2添加中间的虚线
(1)先选AutowareADASMap,再选择add line

(2)添加虚线
此时会出现小方块,挪动改变线段长短,同white line。
注意:虚线用作于机器人移动的路线,是单行道,需要在绘制时注意方向。
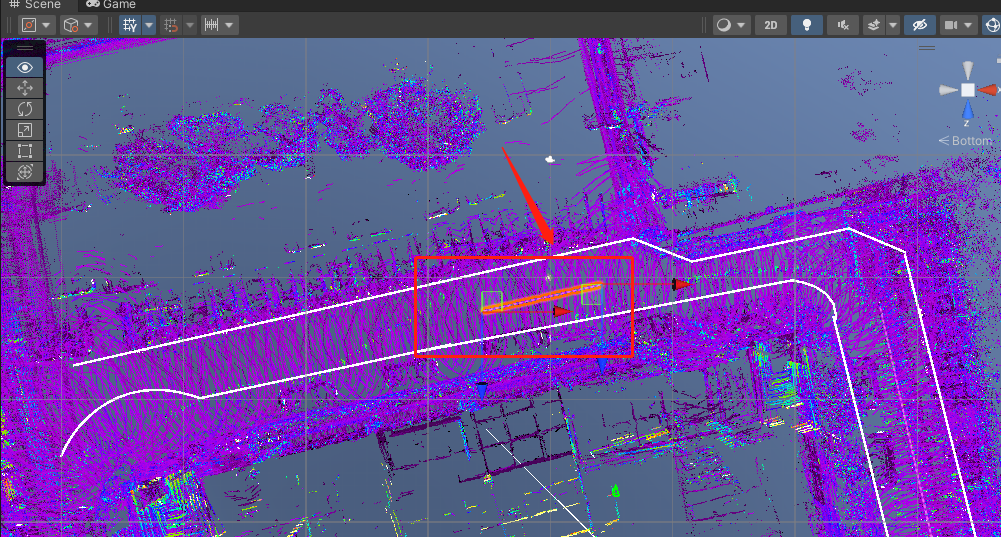
(3)弯曲线段->点击Subdivision->挪动方块,同上一小节白线的操作。
注意:不画曲线也要对线段进行“Subdivision”,选择normal way,完成曲线。
3.3保存道路线数据
点击工具栏的红字(Save Autoware ADASMap to folder),选择保存的文件夹,ctrl+s即可保存。















 1876
1876











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









