






前言
最近开始学习制作Lanelet2矢量地图用于限定区域自动驾驶项目,记录如下,欢迎大家一起讨论学习:
##参考了以下几篇博客:
https://blog.csdn.net/ck784101777/article/details/108229534
https://blog.csdn.net/So____/article/details/129566492
https://blog.csdn.net/weixin_44570248/article/details/118463199
https://blog.csdn.net/qq_33971022/article/details/109013661
一、平台及软件/插件安装
我使用的是Windows 11 + Unity Hub 3.3.0-c9 + Unity 2022.3.5f1c1 + Autoware Maptool Box 插件,建议先安装Unity Hub,然后在Unity Hub中安装推荐的Unity长期支持版(该方式安装的Unity默认安装在C盘)。
1、Unity Hub :
直接在Unit Hub官网https://unity.com/cn/download下载Windows版本,默认选项安装即可;
2、Unity:
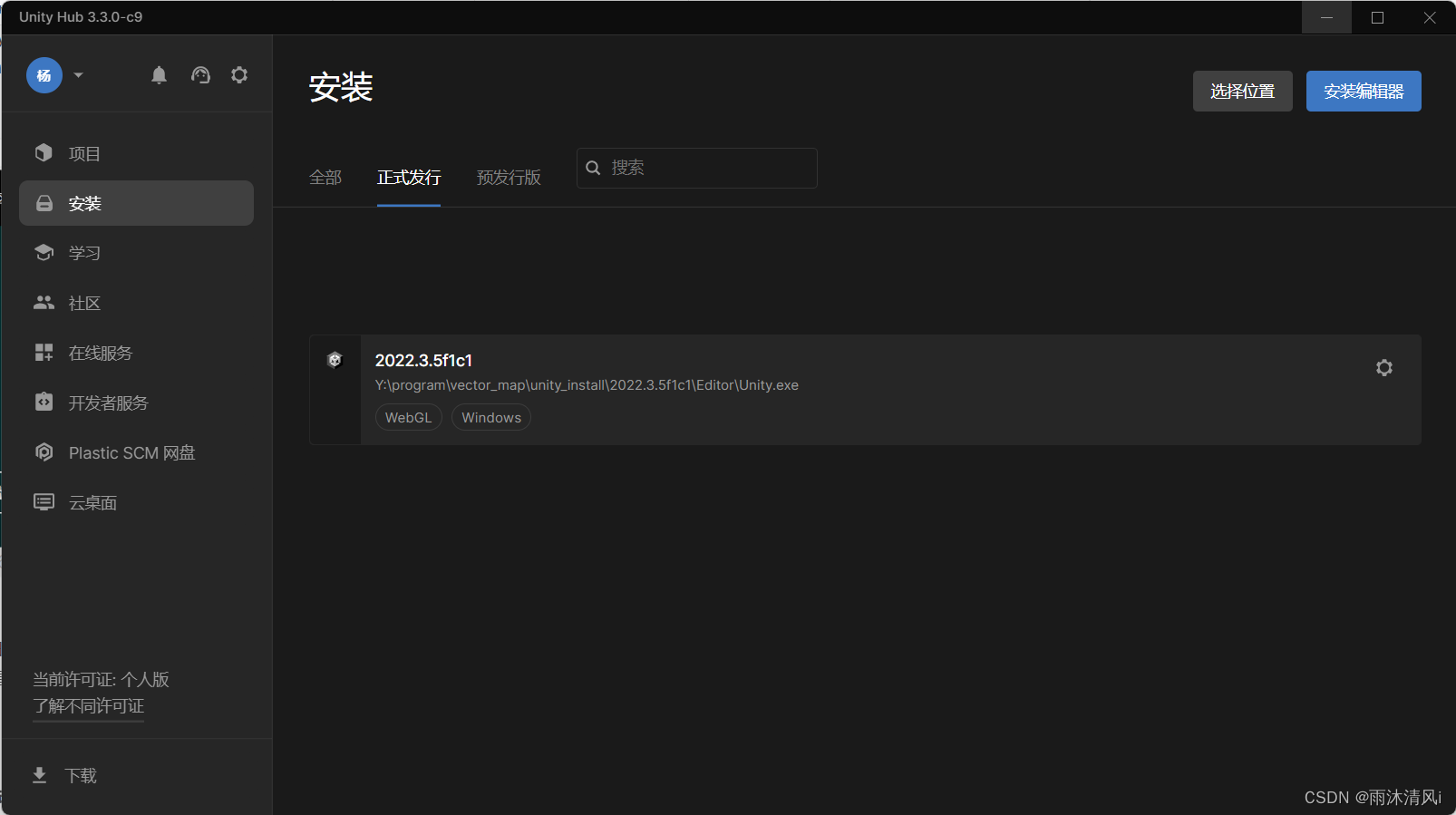
运行Unity Hub,点击左侧菜单栏中的安装,选择版本安装;
同时还需要对Unity进行激活,左上角设置----许可证激活个人版;
3、Autoware Maptool Box :
直接在Github地址https://github.com/autocore-ai/MapToolbox/tree/vector_map下载压缩包,然后解压即可(存放路径不能有中文)。
二、配置Unity
建立Unity项目和导入Autoware Maptool Box
1、创建一个新项目 :
打开Unity Hub----项目----新项目----3D,设置项目名称和存放位置(不能出现中文),不勾选“启用版本管理并同意政策条款”,然后点击创建项目;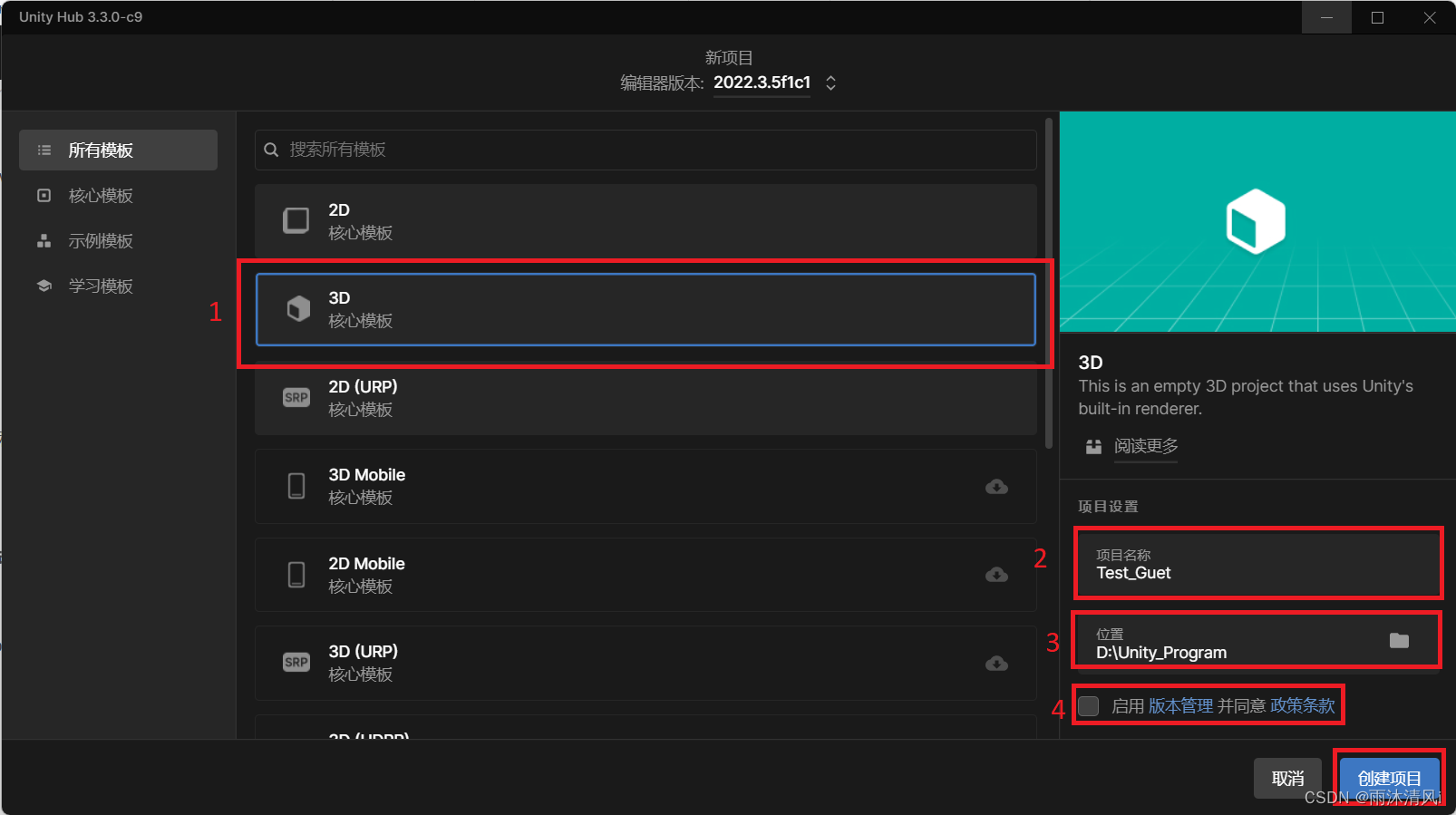
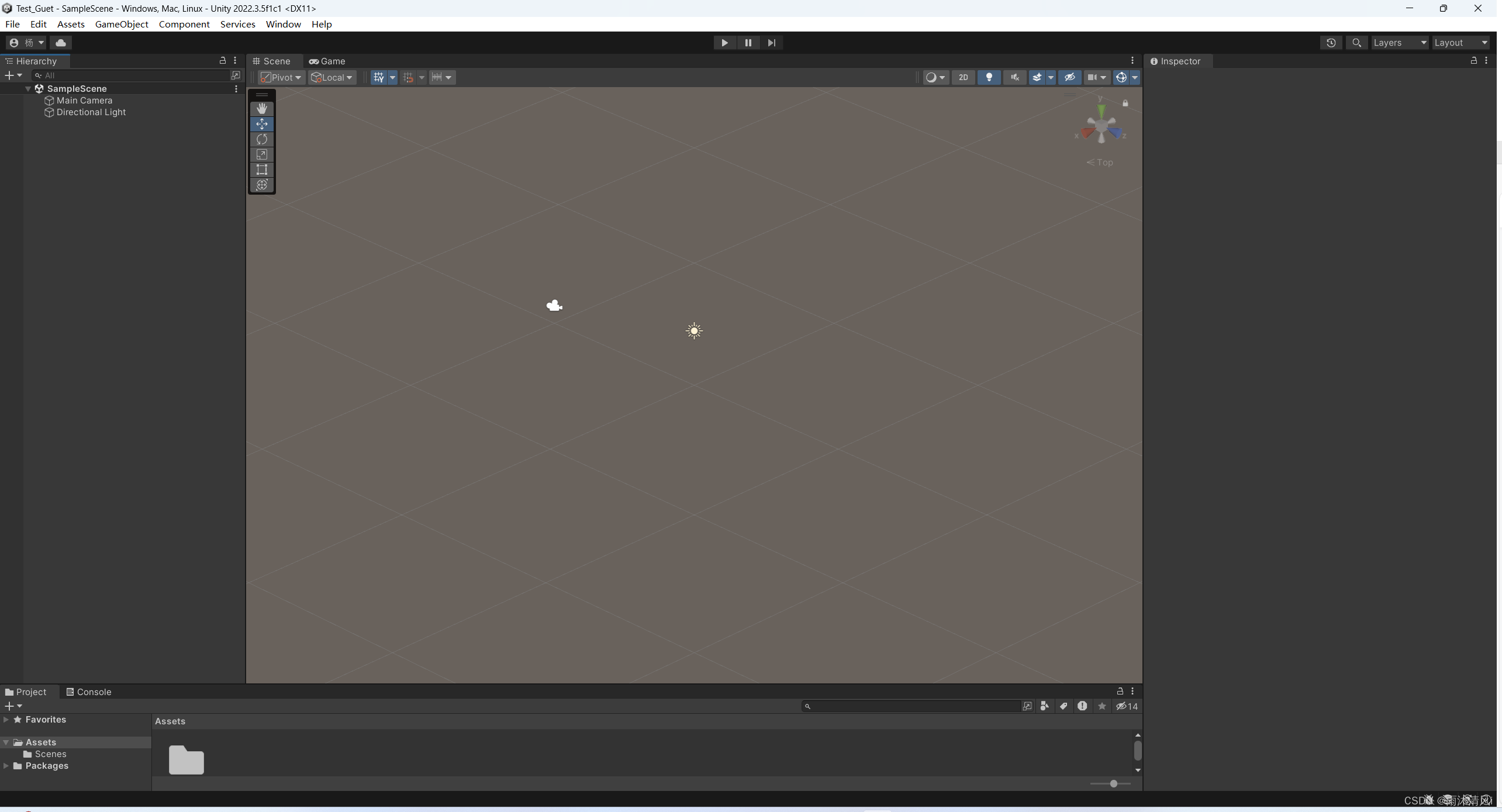
等待几分钟创建完成后界面如下:
2、导入Auoware Maptool Box
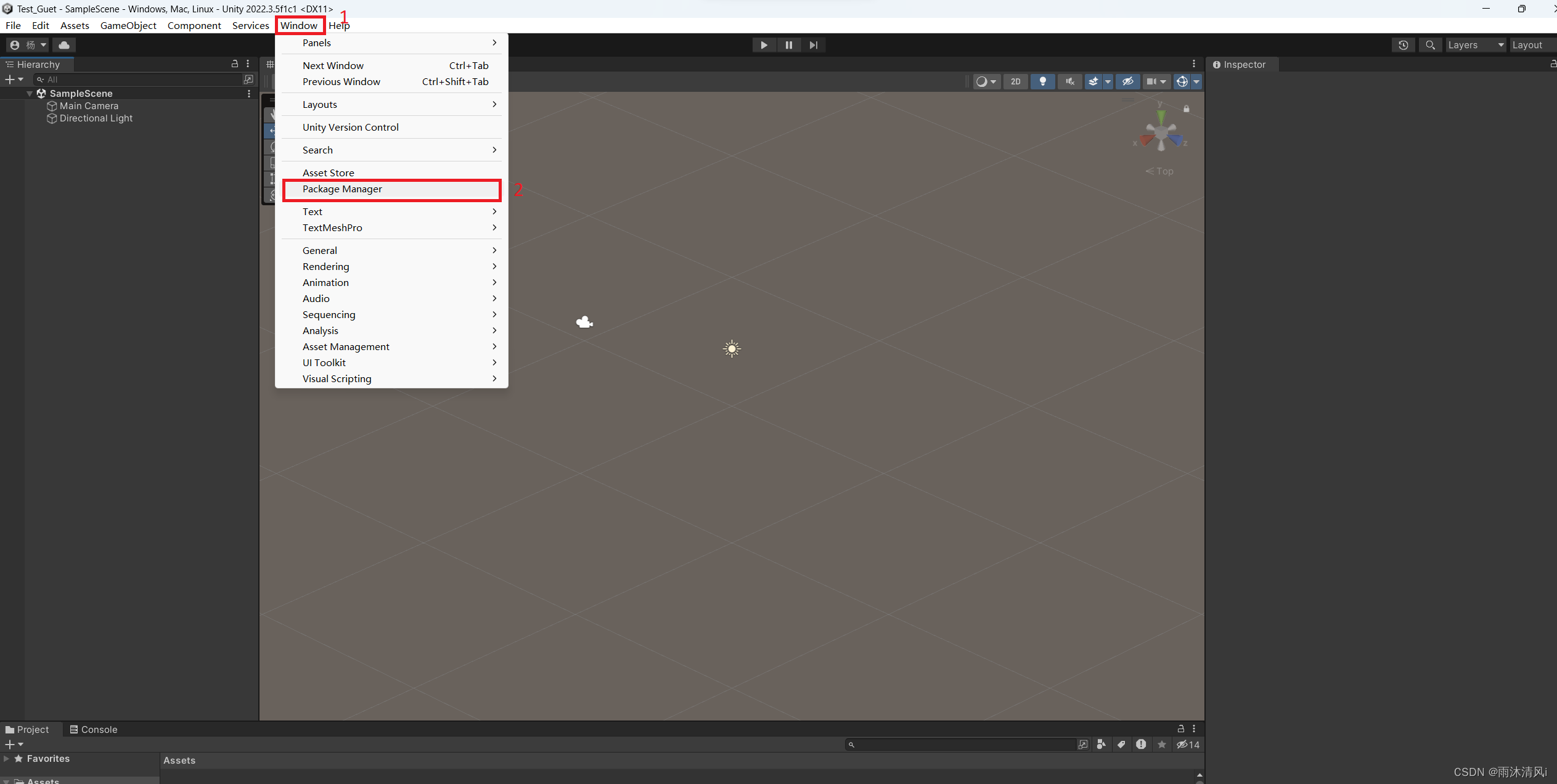
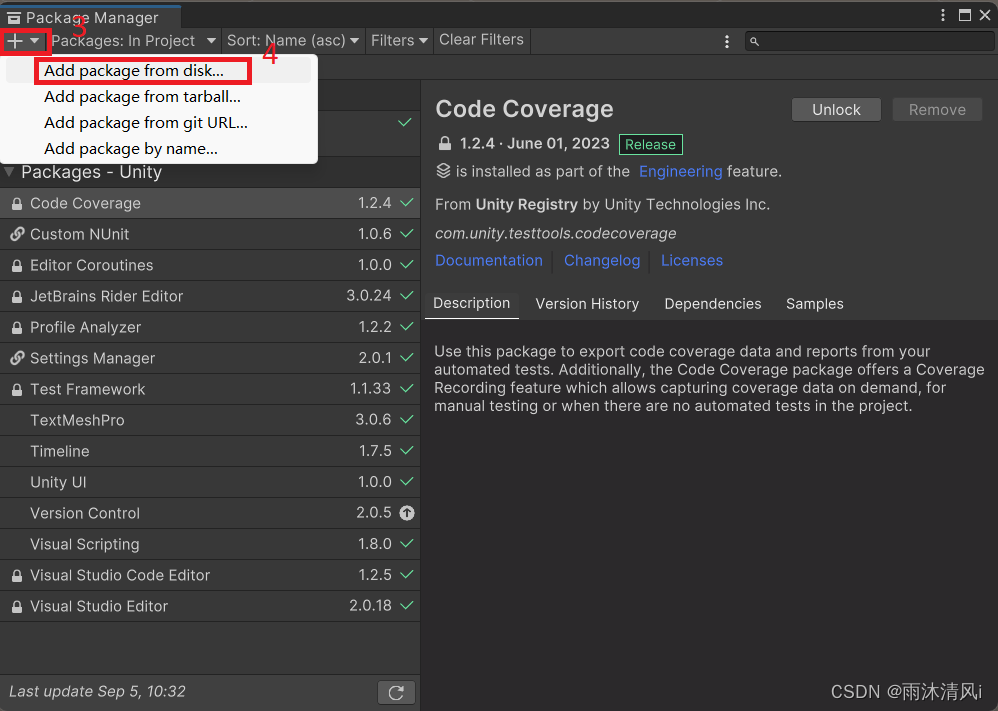
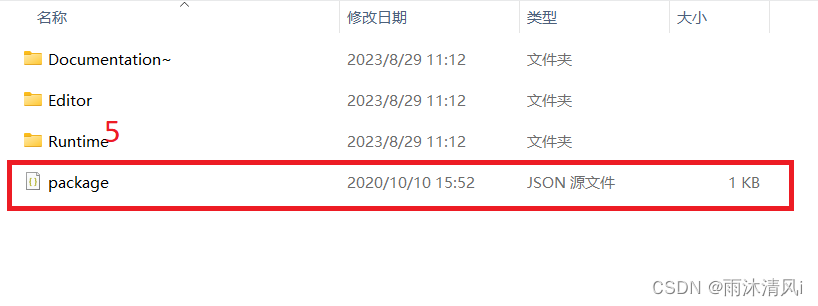
在项目界面上方菜单栏点击Window----Package Manager,然后在弹出的界面点击左上角的“+”----Add package from disk,选择Autoware Maptool Box解压路径中的package.json文件,等待半分钟,加载完成即插件导入完成。
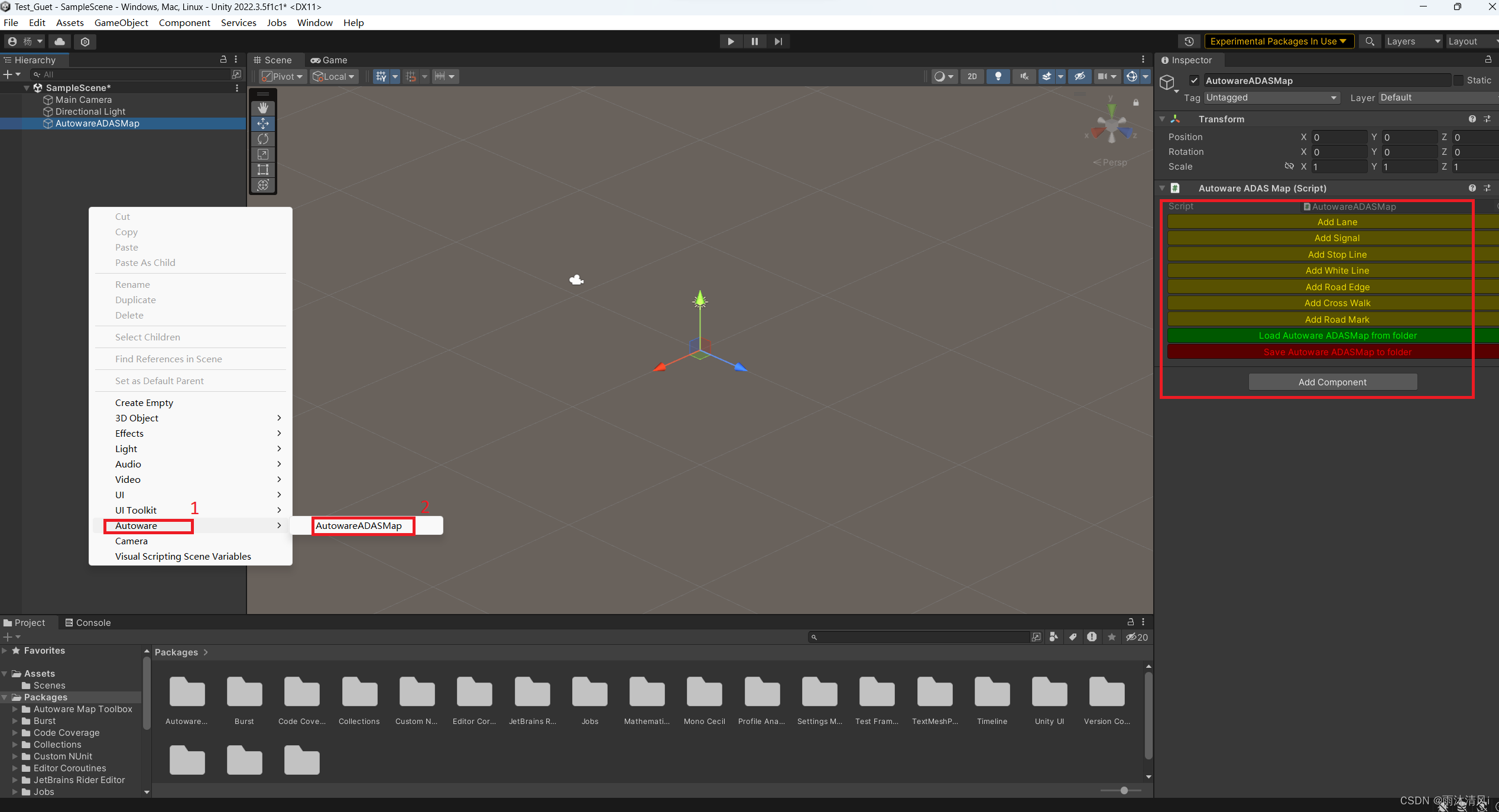
导入完成后,在左侧工具栏空白处单击右键会出现 Autoware----AutowareADASMap的工具,点击后在右侧工具栏有插入车道线、停止线、路沿等工具。
注意:
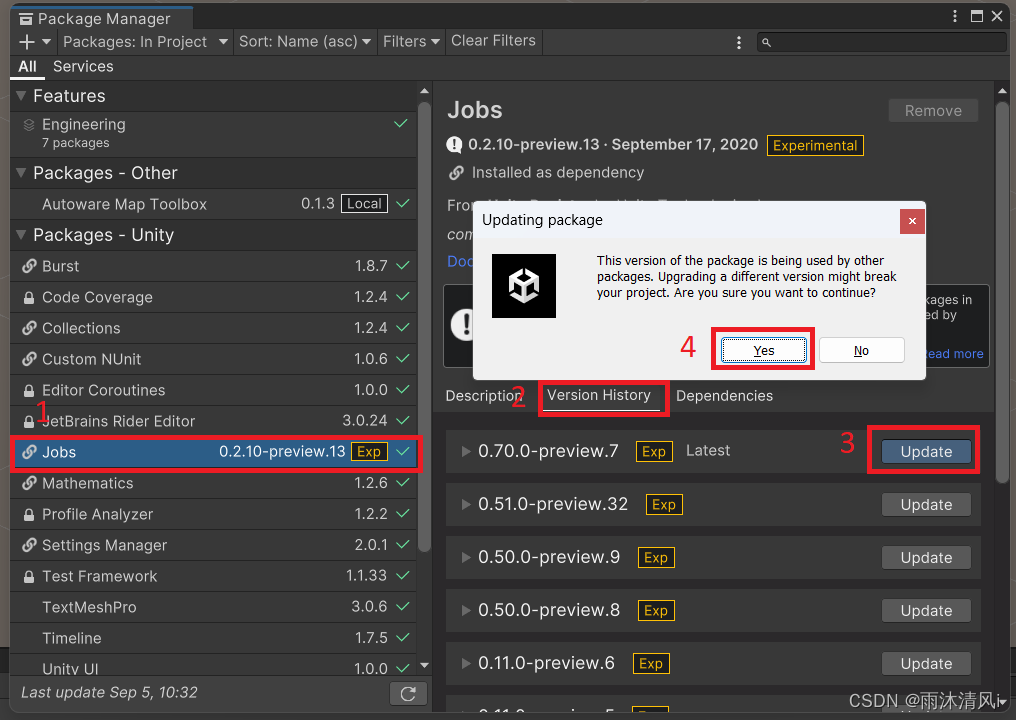
我的版本导入插件之后单击右键没有出现Autoware----AutowareADASMap工具包,后发现在导入完插件后报错:
Library\PackageCache\com.unity.jobs@0.2.10-preview.13\Editor\*******\:error
在Window----Package Manager中找到Jobs----Version History----Updata更新,就能添加Autoware----AutowareADASMap工具包啦。
三、制作Lanelet2矢量地图
1、加载pcd点云地图
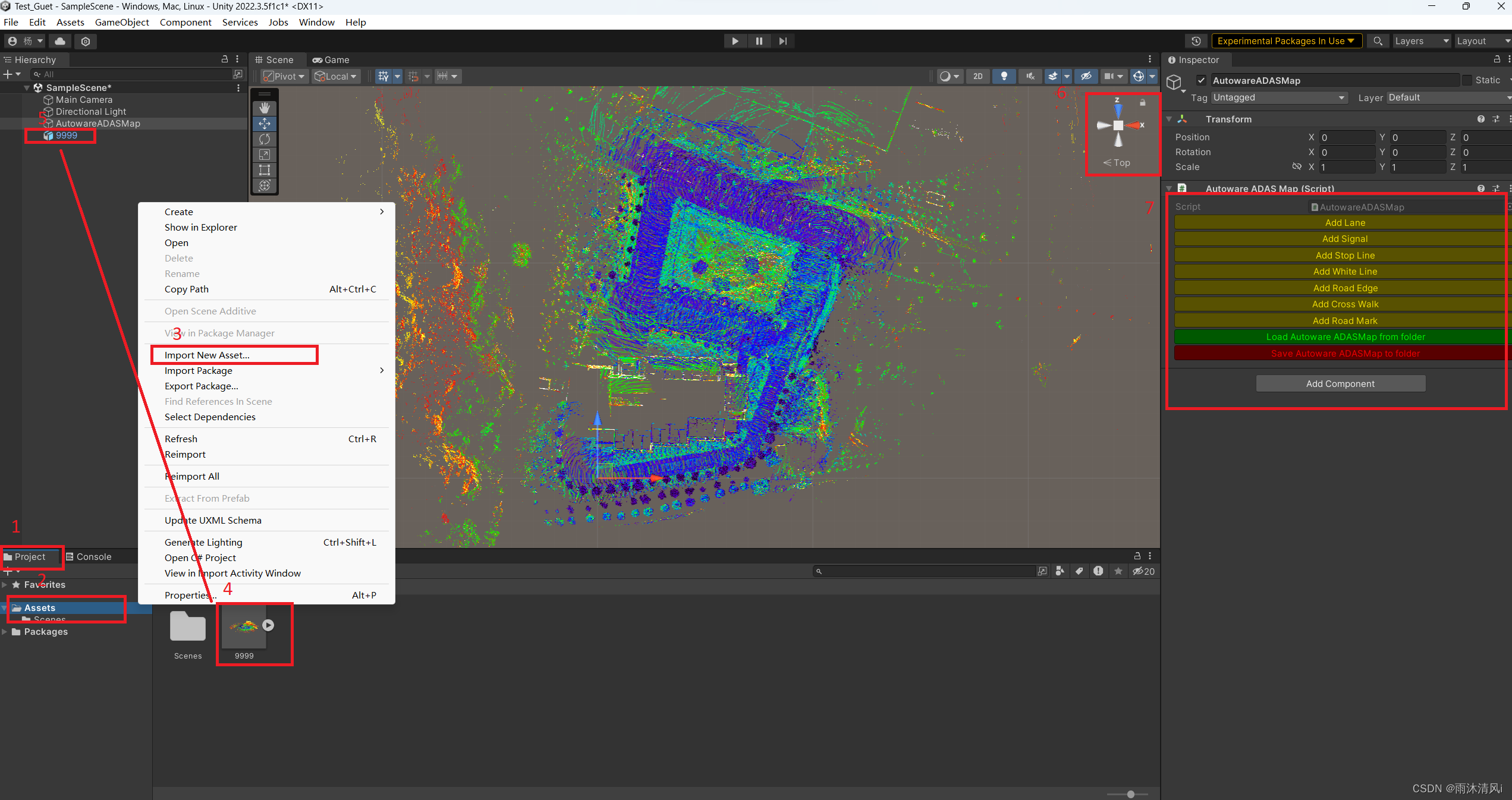
在项目的左下方Project----Assets----Import New Asset添加pcd点云地图,加载完成后在下方的场景里面出现加载的地图,将地图拖到工具栏中,然后调整到合适的视角,加载Maptool工具包。
2、制图
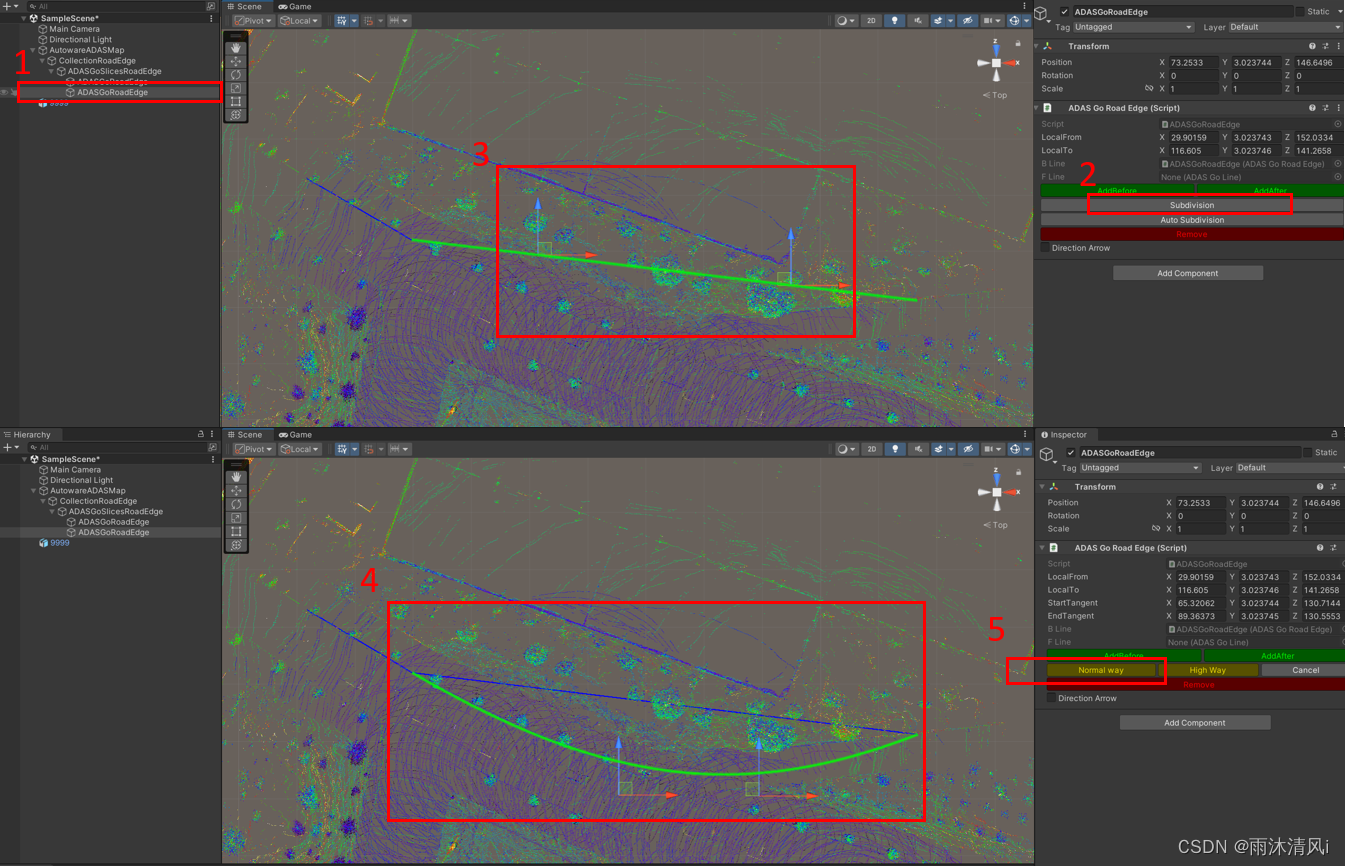
以路沿元素为例,在右侧点击Add Road Edge,在界面中出现两个重叠的坐标轴,此时需要到调整合适的视角,调整高度的值,使添加的道路元素保持在同一高度,并记录该高度值。
注意:如果高度误差太大,会出现在一个位置设置好两个坐标轴的位置,移动一下视角就会发生错位。
再调整到x朝右,z朝上的视角(调整视角的地方有个锁可以锁定,方便操作),先后移动两个坐标轴到预设的路沿位置后,点击AddAfter继续添加下一段。,如果添加的路沿为曲线,先将两个坐标轴移动到曲线的起点和终点,然后点击Subdivition,在起点和终点之间出现两个坐标轴,通过调整这两个坐标轴来调整曲率。
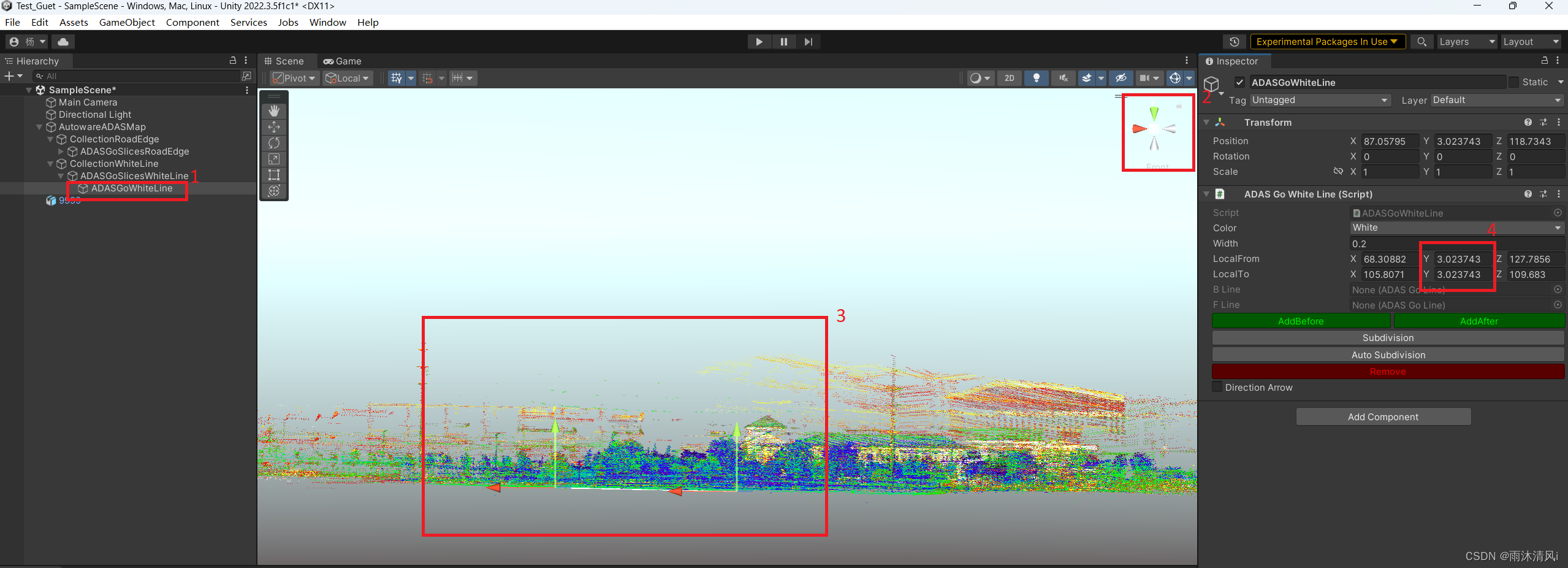
车道线(White Line)、停止线(Stop Line)等元素和上述方法一致,绘制Lane线时需要注意方向与该车道行驶方向一直,高度值直接填写即可。

















 6722
6722











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









