






【软件配置】不使用ROS系统,不进行编译,纯python环境配置rosbag,从而解析.bag文件
【anaconda】conda创建、查看、删除虚拟环境(anaconda命令集)_conda 创建环境-CSDN博客
【Windows配置三】Python3.6安装rosbag_rospy安装-CSDN博客
win10 + python3 + 安装rosbag & cv_bridge & sensor_msgs+解析bag文件生成pcd和图片 - 不能说的秘密 - 博客园 (cnblogs.com)
ROSBAG使用(二):使用python提取bag中的图像和点云 | 码农家园 (codenong.com)
注意:
- 安装版本应该尽量为py3.8,因为存在一个包仅支持到py3.8
- 先按照如下顺序配置依赖包:
#out wall net is best
pip install gnupg -i https://pypi.douban.com/simple/
pip install pycryptodome
pip install pycryptodomex
pip install pyyaml
pip install docutils
pip install python-dateutil
pip install pyparsing
pip install numpy
pip install python-opencv
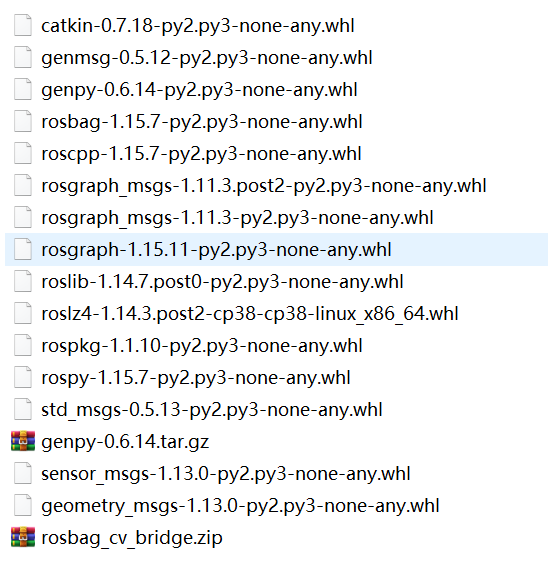
- 若使用设备不方便翻墙,在https://rospypi.github.io/simple下载rosbag包的离线whl文件,再根据报错逐步下载依赖包文件逐个安装即可。大概需要下载如下离线包
- 使用cv_bridge时若报错:No module named ‘cv_bridge.boost’
whl 下载地址:https://files.cnblogs.com/files/yunhgu/rosbag_cv_bridge.zip
pip install cv_bridge-1.13.0.post0-py2.py3-none-any.whl















 2111
2111

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









