






一、Laplace’s equation
数学和物理学中,拉普拉斯方程是一个二阶偏微分方程,通常表示为:
∇
2
f
=
0
\begin{equation}\nabla^2f=0\end{equation}
∇2f=0或者
Δ
f
=
0
\begin{equation}\Delta f=0\end{equation}
Δf=0其中,
Δ
=
∇
⋅
∇
=
∇
2
\Delta=\nabla\cdot\nabla=\nabla^2
Δ=∇⋅∇=∇2表示拉普拉斯算子(Laplace operator),
∇
⋅
\nabla\cdot
∇⋅表示散度算子(divergence operator),
∇
\nabla
∇表示梯度算子(gradient operator),
f
(
x
,
y
,
z
)
f(x,y,z)
f(x,y,z)是一个二阶可微的实函数。如果该方程的右边项是一个给定的函数
h
(
x
,
y
,
z
)
h(x,y,z)
h(x,y,z),则可以得到泊松方程(Possion’s equation):
∇
2
f
=
h
\begin{equation}\nabla^2f=h\end{equation}
∇2f=h 不论是拉普拉斯方程还是泊松方程,它们都是最简形式的椭圆形偏微分方程,同时拉普拉斯方程还是亥姆霍兹方程(Helmholtz equation)的一种特殊形式。
不同坐标系下的拉普拉斯方程的形式
1、在直角坐标系下:
∇ 2 f = ∂ 2 f ∂ x 2 + ∂ 2 f ∂ y 2 + ∂ 2 f ∂ z 2 = 0 \begin{equation}\nabla^2f=\frac{\partial^2f}{\partial x^2}+\frac{\partial^2f}{\partial y^2}+\frac{\partial^2f}{\partial z^2}=0\end{equation} ∇2f=∂x2∂2f+∂y2∂2f+∂z2∂2f=0
2、在柱坐标系下:
∇ 2 f = 1 r ∂ ∂ r ( r ∂ f ∂ r ) + 1 r 2 ∂ 2 f ∂ ϕ 2 + ∂ 2 f ∂ z 2 = 0 \begin{equation}\nabla^2f=\frac{1}{r}\frac{\partial}{\partial r}\left(r\frac{\partial f}{\partial r}\right)+\frac{1}{r^2}\frac{\partial^2f}{\partial\phi^2}+\frac{\partial^2f}{\partial z^2}=0\end{equation} ∇2f=r1∂r∂(r∂r∂f)+r21∂ϕ2∂2f+∂z2∂2f=0
3、在球坐标系下:
由于本文着重讨论球坐标系下的拉普拉斯方程的解,所以球坐标下的拉普拉斯方程作详细讨论:
求解目的:就是将
[
∂
f
∂
x
2
,
∂
f
∂
y
2
,
∂
f
∂
z
2
]
′
\begin{bmatrix}\dfrac{\partial f}{\partial x^2},\dfrac{\partial f}{\partial y^2},\dfrac{\partial f}{\partial z^2}\end{bmatrix}^{'}
[∂x2∂f,∂y2∂f,∂z2∂f]′用
f
f
f对
(
r
,
θ
,
ϕ
)
\left(r,\theta,\phi\right)
(r,θ,ϕ)的一阶和二阶偏微分的线性组合表示出来。
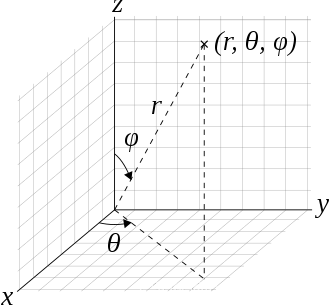
在球坐标
(
r
,
θ
,
ϕ
)
\left( r,\theta,\phi \right)
(r,θ,ϕ)中,
r
r
r表示径向距离,
θ
\theta
θ表示方位角,
ϕ
\phi
ϕ表示极角。
易得:
x
=
r
sin
θ
cos
ϕ
y
=
r
sin
θ
sin
ϕ
z
=
r
cos
θ
\begin{equation}\begin{aligned}&x=r\sin\theta\cos\phi \\&y=r\sin\theta\sin\phi \\&z=r\cos\theta \end{aligned}\end{equation}
x=rsinθcosϕy=rsinθsinϕz=rcosθ
①求出一阶偏导数
∂
f
∂
x
,
∂
f
∂
y
,
∂
f
∂
z
\frac{\partial f}{\partial x},\frac{\partial f}{\partial y},\frac{\partial f}{\partial z}
∂x∂f,∂y∂f,∂z∂f的球坐标形式:
根据上式分别对
(
r
,
θ
,
ϕ
)
\left(r,\theta,\phi\right)
(r,θ,ϕ)求导,再应用链式求导法则,可得:
∂
f
∂
r
=
∂
f
∂
x
∂
x
∂
r
+
∂
f
∂
y
∂
y
∂
r
+
∂
f
∂
z
∂
z
∂
r
=
∂
f
∂
x
[
sin
θ
cos
ϕ
]
+
∂
f
∂
y
[
sin
θ
sin
ϕ
]
+
∂
f
∂
z
[
cos
θ
]
∂
f
∂
θ
=
∂
f
∂
x
∂
x
∂
θ
+
∂
f
∂
y
∂
y
∂
θ
+
∂
f
∂
z
∂
z
∂
θ
=
∂
f
∂
x
[
r
cos
θ
cos
ϕ
]
+
∂
f
∂
y
[
r
cos
θ
sin
ϕ
]
+
∂
f
∂
z
[
−
r
sin
θ
]
∂
f
∂
ϕ
=
∂
f
∂
x
∂
x
∂
ϕ
+
∂
f
∂
y
∂
y
∂
ϕ
+
∂
f
∂
z
∂
z
∂
ϕ
=
∂
f
∂
x
[
−
r
sin
θ
sin
ϕ
]
+
∂
f
∂
y
[
r
sin
θ
cos
ϕ
]
+
∂
f
∂
z
[
0
]
\begin{equation} \begin{aligned}\frac{\partial f}{\partial r}&=\frac{\partial f}{\partial x}\frac{\partial x}{\partial r}+\frac{\partial f}{\partial y}\frac{\partial y}{\partial r}+\frac{\partial f}{\partial z}\frac{\partial z}{\partial r}\\&=\frac{\partial f}{\partial x} \left[ \sin\theta\cos\phi\right]+\frac{\partial f}{\partial y}\left[\sin\theta\sin\phi\right]+\frac{\partial f}{\partial z}\left[\cos\theta\right] \\\frac{\partial f}{\partial \theta}&=\frac{\partial f}{\partial x}\frac{\partial x}{\partial \theta}+\frac{\partial f}{\partial y}\frac{\partial y}{\partial \theta}+\frac{\partial f}{\partial z}\frac{\partial z}{\partial \theta}\\&=\frac{\partial f}{\partial x} \left[ r\cos\theta\cos\phi\right]+\frac{\partial f}{\partial y}\left[r\cos\theta\sin\phi\right]+\frac{\partial f}{\partial z}\left[-r\sin\theta\right] \\\frac{\partial f}{\partial \phi}&=\frac{\partial f}{\partial x}\frac{\partial x}{\partial \phi}+\frac{\partial f}{\partial y}\frac{\partial y}{\partial \phi}+\frac{\partial f}{\partial z}\frac{\partial z}{\partial \phi}\\&=\frac{\partial f}{\partial x} \left[ -r\sin\theta\sin\phi\right]+\frac{\partial f}{\partial y}\left[r\sin\theta\cos\phi\right]+\frac{\partial f}{\partial z}\left[0\right] \end{aligned} \end{equation}
∂r∂f∂θ∂f∂ϕ∂f=∂x∂f∂r∂x+∂y∂f∂r∂y+∂z∂f∂r∂z=∂x∂f[sinθcosϕ]+∂y∂f[sinθsinϕ]+∂z∂f[cosθ]=∂x∂f∂θ∂x+∂y∂f∂θ∂y+∂z∂f∂θ∂z=∂x∂f[rcosθcosϕ]+∂y∂f[rcosθsinϕ]+∂z∂f[−rsinθ]=∂x∂f∂ϕ∂x+∂y∂f∂ϕ∂y+∂z∂f∂ϕ∂z=∂x∂f[−rsinθsinϕ]+∂y∂f[rsinθcosϕ]+∂z∂f[0]上述方程组写成矩阵形式,可得:
[
sin
θ
cos
ϕ
sin
θ
sin
ϕ
cos
θ
r
cos
θ
cos
ϕ
r
cos
θ
sin
ϕ
−
r
sin
θ
−
r
sin
θ
sin
ϕ
r
sin
θ
cos
ϕ
0
]
⋅
[
∂
f
∂
x
∂
f
∂
y
∂
f
∂
z
]
=
[
∂
f
∂
r
∂
f
∂
θ
∂
f
∂
ϕ
]
\begin{equation}\begin{bmatrix}\sin\theta\cos\phi &\sin\theta\sin\phi &\cos\theta \\ r\cos\theta\cos\phi & r\cos\theta\sin\phi &-r\sin\theta \\-r\sin\theta\sin\phi & r\sin\theta\cos\phi & 0\end{bmatrix}\cdot\begin{bmatrix}\dfrac{\partial f}{\partial x}\\[8pt]\dfrac{\partial f}{\partial y}\\[8pt]\dfrac{\partial f}{\partial z}\end{bmatrix}=\begin{bmatrix}\dfrac{\partial f}{\partial r}\\[8pt]\dfrac{\partial f}{\partial \theta}\\[8pt]\dfrac{\partial f}{\partial \phi}\end{bmatrix}\end{equation}
⎣
⎡sinθcosϕrcosθcosϕ−rsinθsinϕsinθsinϕrcosθsinϕrsinθcosϕcosθ−rsinθ0⎦
⎤⋅⎣
⎡∂x∂f∂y∂f∂z∂f⎦
⎤=⎣
⎡∂r∂f∂θ∂f∂ϕ∂f⎦
⎤
记
A
=
[
sin
θ
cos
ϕ
sin
θ
sin
ϕ
cos
θ
r
cos
θ
cos
ϕ
r
cos
θ
sin
ϕ
−
r
sin
θ
−
r
sin
θ
sin
ϕ
r
sin
θ
cos
ϕ
0
]
A=\begin{bmatrix}\sin\theta\cos\phi &\sin\theta\sin\phi &\cos\theta \\ r\cos\theta\cos\phi & r\cos\theta\sin\phi &-r\sin\theta \\-r\sin\theta\sin\phi & r\sin\theta\cos\phi & 0\end{bmatrix}
A=⎣
⎡sinθcosϕrcosθcosϕ−rsinθsinϕsinθsinϕrcosθsinϕrsinθcosϕcosθ−rsinθ0⎦
⎤,如若要得到矩阵
[
∂
f
∂
x
,
∂
f
∂
y
,
∂
f
∂
z
]
′
\begin{bmatrix}\dfrac{\partial f}{\partial x},\dfrac{\partial f}{\partial y},\dfrac{\partial f}{\partial z}\end{bmatrix}^{'}
[∂x∂f,∂y∂f,∂z∂f]′,则需要求取左式
A
A
A的矩阵逆
A
−
1
A^{-1}
A−1,利用MATLAB符号求解器可得:
A
−
1
=
[
sin
θ
cos
ϕ
cos
θ
cos
ϕ
r
−
sin
ϕ
r
sin
θ
sin
θ
sin
ϕ
cos
θ
sin
ϕ
r
cos
ϕ
r
sin
θ
cos
θ
−
sin
θ
r
0
]
\begin{equation}A^{-1}=\begin{bmatrix}\sin\theta\cos\phi &\dfrac{\cos\theta\cos\phi}{r} &-\dfrac{\sin\phi}{r\sin\theta} \\[8pt]\sin\theta\sin\phi &\dfrac{\cos\theta\sin\phi}{r} &\dfrac{\cos\phi}{r\sin\theta} \\[8pt]\cos\theta & -\dfrac{\sin\theta}{r} &0\end{bmatrix}\end{equation}
A−1=⎣
⎡sinθcosϕsinθsinϕcosθrcosθcosϕrcosθsinϕ−rsinθ−rsinθsinϕrsinθcosϕ0⎦
⎤至此我们得到了:
[
∂
f
∂
x
∂
f
∂
y
∂
f
∂
z
]
=
A
−
1
⋅
[
∂
f
∂
r
∂
f
∂
θ
∂
f
∂
ϕ
]
\begin{equation}\begin{bmatrix}\dfrac{\partial f}{\partial x}\\[8pt]\dfrac{\partial f}{\partial y}\\[8pt]\dfrac{\partial f}{\partial z}\end{bmatrix}=A^{-1}\cdot\begin{bmatrix}\dfrac{\partial f}{\partial r}\\[8pt]\dfrac{\partial f}{\partial \theta}\\[8pt]\dfrac{\partial f}{\partial \phi}\end{bmatrix} \end{equation}
⎣
⎡∂x∂f∂y∂f∂z∂f⎦
⎤=A−1⋅⎣
⎡∂r∂f∂θ∂f∂ϕ∂f⎦
⎤据此,再利用复合函数求导法则,求取
f
f
f在直角坐标系
(
x
,
y
,
z
)
\left(x,y,z\right)
(x,y,z)下的各个二阶偏导数如下:
在次过程中,需要反复使用
r
,
sin
θ
,
cos
θ
,
sin
ϕ
,
cos
ϕ
r,\sin\theta,\cos\theta,\sin\phi,\cos\phi
r,sinθ,cosθ,sinϕ,cosϕ对
x
,
y
,
z
x,y,z
x,y,z的偏导数,使得最终结果是含有与球坐标系有关的参数
(
r
,
sin
θ
,
cos
θ
,
sin
ϕ
,
cos
ϕ
)
\left(r,\sin\theta,\cos\theta,\sin\phi,\cos\phi\right)
(r,sinθ,cosθ,sinϕ,cosϕ)和
f
f
f对球坐标参数
(
r
,
θ
,
ϕ
)
\left(r,\theta,\phi\right)
(r,θ,ϕ)的各阶偏导数的多项式,如何求取呢?
笔者利用求导法则的计算结果如下:
x
2
+
y
2
+
z
2
=
r
2
∂
∂
x
(
x
2
+
y
2
+
z
2
)
=
∂
∂
x
r
2
2
x
=
2
r
∂
r
∂
x
∂
r
∂
x
=
x
r
=
r
sin
θ
cos
ϕ
r
=
sin
θ
cos
ϕ
\begin{equation}\begin{aligned}x^2+y^2+z^2 &=r^2\\\frac{\partial}{\partial x}\left(x^2+y^2+z^2\right) &=\frac{\partial}{\partial x}r^2\\[8pt]2x &=2r\frac{\partial r}{\partial x}\\\frac{\partial r}{\partial x} &=\frac{x}{r}\\ &=\frac{r\sin\theta\cos\phi}{r}\\ &=\sin\theta\cos\phi \end{aligned} \end{equation}
x2+y2+z2∂x∂(x2+y2+z2)2x∂x∂r=r2=∂x∂r2=2r∂x∂r=rx=rrsinθcosϕ=sinθcosϕ同理可得:
∂
r
∂
y
=
y
r
=
r
sin
θ
sin
ϕ
r
=
sin
θ
sin
ϕ
∂
r
∂
z
=
z
r
=
r
cos
ϕ
r
=
cos
ϕ
\begin{equation}\begin{aligned}\frac{\partial r}{\partial y} &=\frac{y}{r}=\frac{r\sin\theta\sin\phi}{r}=\sin\theta\sin\phi \\\frac{\partial r}{\partial z} &=\frac{z}{r}=\frac{r\cos\phi}{r}=\cos\phi \end{aligned} \end{equation}
∂y∂r∂z∂r=ry=rrsinθsinϕ=sinθsinϕ=rz=rrcosϕ=cosϕ接下来求取
sin
ϕ
\sin\phi
sinϕ,
cos
ϕ
\cos\phi
cosϕ的偏导数:
x
=
r
sin
θ
cos
ϕ
y
=
r
sin
θ
sin
ϕ
y
x
=
tan
ϕ
∂
∂
y
y
x
=
∂
∂
y
tan
ϕ
1
x
=
tan
′
ϕ
∂
ϕ
∂
y
=
1
cos
2
ϕ
∂
ϕ
∂
y
∂
ϕ
∂
y
=
cos
2
ϕ
x
=
cos
2
ϕ
r
sin
θ
cos
ϕ
=
cos
ϕ
r
sin
θ
\begin{equation}\begin{aligned}x &=r\sin\theta\cos\phi\\ y&=r\sin\theta\sin\phi\\\frac{y}{x} &=\tan\phi\\ \frac{\partial}{\partial y} \frac{y}{x} &=\frac{\partial}{\partial y} \tan\phi\\\frac{1}{x}&=\tan^{'}\phi\frac{\partial \phi}{\partial y}\\ &=\frac{1}{\cos^2\phi}\frac{\partial \phi}{\partial y}\\\frac{\partial \phi}{\partial y}&=\frac{\cos^2\phi}{x}\\ &=\frac{\cos^2\phi}{r\sin\theta\cos\phi}\\&=\frac{\cos\phi}{r\sin\theta} \end{aligned} \end{equation}
xyxy∂y∂xyx1∂y∂ϕ=rsinθcosϕ=rsinθsinϕ=tanϕ=∂y∂tanϕ=tan′ϕ∂y∂ϕ=cos2ϕ1∂y∂ϕ=xcos2ϕ=rsinθcosϕcos2ϕ=rsinθcosϕ
∂
sin
ϕ
∂
y
=
∂
sin
ϕ
∂
ϕ
∂
ϕ
∂
y
=
cos
ϕ
∂
ϕ
∂
y
=
cos
2
ϕ
r
sin
θ
∂
cos
ϕ
∂
y
=
∂
cos
ϕ
∂
ϕ
∂
ϕ
∂
y
=
−
sin
ϕ
∂
ϕ
∂
y
=
−
sin
ϕ
cos
ϕ
r
sin
θ
\begin{equation}\begin{aligned}\frac{\partial\sin\phi}{\partial y} &=\frac{\partial\sin\phi}{\partial \phi} \frac{\partial\phi}{\partial y} =\cos\phi\frac{\partial\phi}{\partial y}=\frac{\cos^2\phi}{r\sin\theta}\\\frac{\partial\cos\phi}{\partial y} &=\frac{\partial\cos\phi}{\partial \phi} \frac{\partial\phi}{\partial y} =-\sin\phi\frac{\partial\phi}{\partial y}=-\frac{\sin\phi\cos\phi}{r\sin\theta} \end{aligned}\end{equation}
∂y∂sinϕ∂y∂cosϕ=∂ϕ∂sinϕ∂y∂ϕ=cosϕ∂y∂ϕ=rsinθcos2ϕ=∂ϕ∂cosϕ∂y∂ϕ=−sinϕ∂y∂ϕ=−rsinθsinϕcosϕ
y
x
=
tan
ϕ
∂
∂
x
y
x
=
∂
∂
x
tan
ϕ
−
y
x
2
=
tan
′
ϕ
∂
ϕ
∂
x
=
1
cos
2
ϕ
∂
ϕ
∂
x
∂
ϕ
∂
x
=
−
y
cos
2
ϕ
x
2
=
r
sin
θ
sin
ϕ
cos
2
ϕ
r
2
sin
θ
2
cos
ϕ
2
=
sin
ϕ
r
sin
θ
\begin{equation}\begin{aligned}\frac{y}{x} &=\tan\phi\\ \frac{\partial}{\partial x} \frac{y}{x} &=\frac{\partial}{\partial x} \tan\phi\\-\frac{y}{x^2}&=\tan^{'}\phi\frac{\partial \phi}{\partial x}\\ &=\frac{1}{\cos^2\phi}\frac{\partial \phi}{\partial x}\\\frac{\partial \phi}{\partial x}&=-\frac{y\cos^2\phi}{x^2}\\ &=\frac{r\sin\theta\sin\phi\cos^2\phi}{r^2\sin\theta^2\cos\phi^2}\\&=\frac{\sin\phi}{r\sin\theta} \end{aligned} \end{equation}
xy∂x∂xy−x2y∂x∂ϕ=tanϕ=∂x∂tanϕ=tan′ϕ∂x∂ϕ=cos2ϕ1∂x∂ϕ=−x2ycos2ϕ=r2sinθ2cosϕ2rsinθsinϕcos2ϕ=rsinθsinϕ
∂
sin
ϕ
∂
x
=
∂
sin
ϕ
∂
ϕ
∂
ϕ
∂
x
=
cos
ϕ
∂
ϕ
∂
x
=
sin
ϕ
cos
ϕ
r
sin
θ
∂
cos
ϕ
∂
x
=
∂
cos
ϕ
∂
ϕ
∂
ϕ
∂
x
=
−
sin
ϕ
∂
ϕ
∂
x
=
−
sin
ϕ
2
r
sin
θ
\begin{equation}\begin{aligned}\frac{\partial\sin\phi}{\partial x} &=\frac{\partial\sin\phi}{\partial \phi} \frac{\partial\phi}{\partial x} =\cos\phi\frac{\partial\phi}{\partial x}=\frac{\sin\phi\cos\phi}{r\sin\theta}\\\frac{\partial\cos\phi}{\partial x} &=\frac{\partial\cos\phi}{\partial \phi} \frac{\partial\phi}{\partial x} =-\sin\phi\frac{\partial\phi}{\partial x}=-\frac{\sin\phi^2}{r\sin\theta} \end{aligned}\end{equation}
∂x∂sinϕ∂x∂cosϕ=∂ϕ∂sinϕ∂x∂ϕ=cosϕ∂x∂ϕ=rsinθsinϕcosϕ=∂ϕ∂cosϕ∂x∂ϕ=−sinϕ∂x∂ϕ=−rsinθsinϕ2
∂
sin
ϕ
∂
z
=
0
∂
cos
ϕ
∂
z
=
0
\begin{equation}\begin{aligned}\frac{\partial\sin\phi}{\partial z} &=0\\\frac{\partial\cos\phi}{\partial z} &=0 \end{aligned}\end{equation}
∂z∂sinϕ∂z∂cosϕ=0=0接下来求取
sin
θ
\sin\theta
sinθ,
cos
θ
\cos\theta
cosθ的偏导数:
x
=
r
sin
θ
cos
ϕ
y
=
r
sin
θ
sin
ϕ
z
=
r
cos
θ
x
2
=
r
2
sin
2
θ
2
cos
2
ϕ
2
y
2
=
r
2
sin
2
θ
2
sin
2
ϕ
2
x
2
+
y
2
=
r
2
sin
2
θ
x
2
+
y
2
=
r
sin
θ
x
2
+
y
2
z
=
tan
θ
∂
∂
z
x
2
+
y
2
z
=
∂
∂
z
tan
θ
−
x
2
+
y
2
z
2
=
tan
′
θ
∂
θ
∂
z
=
1
cos
2
θ
∂
θ
∂
z
∂
θ
∂
z
=
−
r
sin
θ
cos
2
θ
r
2
cos
2
θ
=
−
sin
θ
r
\begin{equation}\begin{aligned}x &=r\sin\theta\cos\phi\\ y&=r\sin\theta\sin\phi \\z&=r\cos\theta \\x^2 &=r^2\sin^2\theta^2\cos^2\phi^2 \\ y^2&=r^2\sin^2\theta^2\sin^2\phi^2 \\x^2+y^2 &=r^2\sin^2\theta \\\sqrt{x^2+y^2} &=r\sin\theta \\\frac{\sqrt{x^2+y^2} }{z}&=\tan\theta \\ \frac{\partial}{\partial z} \frac{\sqrt{x^2+y^2} }{z}&=\frac{\partial}{\partial z} \tan\theta \\-\frac{\sqrt{x^2+y^2}}{z^2}&=\tan^{'}\theta\frac{\partial \theta}{\partial z} \\ &=\frac{1}{\cos^2\theta}\frac{\partial \theta}{\partial z} \\\frac{\partial \theta}{\partial z}&=-\frac{r\sin\theta\cos^{2}\theta}{r^2\cos^{2}\theta} \\ &=-\frac{\sin\theta}{r} \end{aligned} \end{equation}
xyzx2y2x2+y2x2+y2zx2+y2∂z∂zx2+y2−z2x2+y2∂z∂θ=rsinθcosϕ=rsinθsinϕ=rcosθ=r2sin2θ2cos2ϕ2=r2sin2θ2sin2ϕ2=r2sin2θ=rsinθ=tanθ=∂z∂tanθ=tan′θ∂z∂θ=cos2θ1∂z∂θ=−r2cos2θrsinθcos2θ=−rsinθ
∂
sin
θ
∂
z
=
∂
sin
θ
∂
θ
∂
θ
∂
z
=
cos
θ
∂
θ
∂
z
=
−
sin
θ
cos
θ
r
∂
cos
θ
∂
z
=
∂
cos
θ
∂
θ
∂
θ
∂
z
=
−
sin
θ
∂
θ
∂
z
=
−
sin
θ
2
r
\begin{equation}\begin{aligned}\frac{\partial\sin\theta}{\partial z} &=\frac{\partial\sin\theta}{\partial \theta} \frac{\partial\theta}{\partial z} =\cos\theta\frac{\partial\theta}{\partial z}=-\frac{\sin\theta\cos\theta}{r} \\\frac{\partial\cos\theta}{\partial z} &=\frac{\partial\cos\theta}{\partial \theta} \frac{\partial\theta}{\partial z} =-\sin\theta\frac{\partial\theta}{\partial z}=-\frac{\sin\theta^2}{r} \end{aligned}\end{equation}
∂z∂sinθ∂z∂cosθ=∂θ∂sinθ∂z∂θ=cosθ∂z∂θ=−rsinθcosθ=∂θ∂cosθ∂z∂θ=−sinθ∂z∂θ=−rsinθ2同理,在这里不作赘述,可得:
∂
sin
θ
∂
x
=
cos
2
θ
cos
ϕ
r
∂
cos
θ
∂
x
=
−
sin
θ
cos
θ
cos
ϕ
r
\begin{equation}\begin{aligned}\frac{\partial\sin\theta}{\partial x} &=\frac{\cos^2\theta\cos\phi}{r} \\\frac{\partial\cos\theta}{\partial x} &=-\frac{\sin\theta\cos\theta\cos\phi}{r} \end{aligned}\end{equation}
∂x∂sinθ∂x∂cosθ=rcos2θcosϕ=−rsinθcosθcosϕ
∂
sin
θ
∂
y
=
cos
2
θ
sin
ϕ
r
∂
cos
θ
∂
y
=
−
sin
θ
cos
θ
sin
ϕ
r
\begin{equation}\begin{aligned}\frac{\partial\sin\theta}{\partial y} &=\frac{\cos^2\theta\sin\phi}{r} \\\frac{\partial\cos\theta}{\partial y} &=-\frac{\sin\theta\cos\theta\sin\phi}{r} \end{aligned}\end{equation}
∂y∂sinθ∂y∂cosθ=rcos2θsinϕ=−rsinθcosθsinϕ
∂
(
∂
f
/
∂
x
)
/
∂
x
=
(
sin
θ
)
2
(
cos
ϕ
)
2
∂
∂
f
/
∂
r
/
∂
r
+
r
−
1
sin
θ
cos
θ
(
cos
ϕ
)
2
∂
∂
f
/
∂
r
/
∂
θ
+
∂
f
/
∂
r
r
−
1
(
cos
θ
)
2
(
cos
ϕ
)
2
+
∂
f
/
∂
r
r
−
1
(
sin
ϕ
)
2
−
r
−
1
sin
ϕ
cos
ϕ
∂
∂
f
/
∂
r
/
∂
ϕ
+
r
−
1
sin
θ
cos
θ
(
cos
ϕ
)
2
∂
∂
f
/
∂
θ
/
∂
r
+
r
−
2
(
cos
θ
)
2
(
cos
ϕ
)
2
∂
∂
f
/
∂
θ
/
∂
θ
+
∂
f
/
∂
θ
r
−
2
(
sin
θ
)
−
1
cos
θ
(
sin
ϕ
)
2
−
r
−
2
(
sin
θ
)
−
1
cos
θ
sin
ϕ
cos
ϕ
∂
∂
f
/
∂
θ
/
∂
ϕ
−
∂
f
/
∂
θ
r
−
2
sin
θ
cos
θ
(
cos
ϕ
)
2
−
∂
f
/
∂
θ
r
−
2
sin
θ
cos
θ
(
cos
ϕ
)
2
+
r
−
2
(
sin
θ
)
−
2
(
sin
ϕ
)
2
∂
∂
f
/
∂
ϕ
/
∂
ϕ
+
∂
f
/
∂
ϕ
r
−
2
(
sin
θ
)
−
2
(
cos
θ
)
2
sin
ϕ
cos
ϕ
+
∂
f
/
∂
ϕ
r
−
2
(
sin
θ
)
−
2
sin
ϕ
cos
ϕ
+
∂
f
/
∂
ϕ
r
−
2
sin
ϕ
cos
ϕ
−
r
−
1
sin
ϕ
cos
ϕ
∂
∂
f
/
∂
ϕ
/
∂
r
−
r
−
2
(
sin
θ
)
−
1
cos
θ
sin
ϕ
cos
ϕ
∂
∂
f
/
∂
ϕ
/
∂
θ
\begin{equation}\begin{aligned}∂( ∂f/∂x )/∂x&=(\sinθ)^2 (\cosϕ)^2 ∂∂f/∂r/∂r \\&+r^{-1} \sinθ \cosθ (\cosϕ)^2 ∂∂f/∂r/∂θ \\&+∂f/∂r r^{-1} (\cosθ)^2 (\cosϕ)^2 \\&+∂f/∂r r^{-1} (\sinϕ)^2 \\&-r^{-1} \sinϕ \cosϕ ∂∂f/∂r/∂ϕ \\&+r^{-1} \sinθ \cosθ (\cosϕ)^2 ∂∂f/∂θ/∂r \\&+r^{-2} (\cosθ)^2 (\cosϕ)^2 ∂∂f/∂θ/∂θ \\&+∂f/∂θ r^{-2} (\sinθ)^{-1} \cosθ (\sinϕ)^2 \\&-r^{-2} (\sinθ)^{-1} \cosθ \sinϕ \cosϕ ∂∂f/∂θ/∂ϕ \\&-∂f/∂θ r^{-2} \sinθ \cosθ (\cosϕ)^2 \\&-∂f/∂θ r^{-2} \sinθ \cosθ (\cosϕ)^2 \\&+r^{-2} (\sinθ)^{-2} (\sinϕ)^2 ∂∂f/∂ϕ/∂ϕ \\&+∂f/∂ϕ r^{-2} (\sinθ)^{-2} (\cosθ)^2 \sinϕ \cosϕ \\&+∂f/∂ϕ r^{-2} (\sinθ)^{-2} \sinϕ\cosϕ \\&+∂f/∂ϕ r^{-2} \sinϕ \cosϕ \\&-r^{-1} \sinϕ \cosϕ ∂∂f/∂ϕ/∂r \\&-r^{-2 }(\sinθ)^{-1} \cosθ \sinϕ \cosϕ ∂∂f/∂ϕ/∂θ\end{aligned}\end{equation}
∂(∂f/∂x)/∂x=(sinθ)2(cosϕ)2∂∂f/∂r/∂r+r−1sinθcosθ(cosϕ)2∂∂f/∂r/∂θ+∂f/∂rr−1(cosθ)2(cosϕ)2+∂f/∂rr−1(sinϕ)2−r−1sinϕcosϕ∂∂f/∂r/∂ϕ+r−1sinθcosθ(cosϕ)2∂∂f/∂θ/∂r+r−2(cosθ)2(cosϕ)2∂∂f/∂θ/∂θ+∂f/∂θr−2(sinθ)−1cosθ(sinϕ)2−r−2(sinθ)−1cosθsinϕcosϕ∂∂f/∂θ/∂ϕ−∂f/∂θr−2sinθcosθ(cosϕ)2−∂f/∂θr−2sinθcosθ(cosϕ)2+r−2(sinθ)−2(sinϕ)2∂∂f/∂ϕ/∂ϕ+∂f/∂ϕr−2(sinθ)−2(cosθ)2sinϕcosϕ+∂f/∂ϕr−2(sinθ)−2sinϕcosϕ+∂f/∂ϕr−2sinϕcosϕ−r−1sinϕcosϕ∂∂f/∂ϕ/∂r−r−2(sinθ)−1cosθsinϕcosϕ∂∂f/∂ϕ/∂θ同理可以得到其他的二阶偏导数,这里不作展示,会在本文结尾附上。
得到的最终结果如下:
∂
2
f
∂
x
2
+
∂
2
f
∂
x
2
+
∂
2
f
∂
x
2
=
∂
2
f
∂
r
2
+
1
r
2
∂
2
f
∂
θ
2
+
1
r
2
sin
2
θ
∂
2
f
∂
ϕ
2
+
2
r
∂
f
∂
r
+
cos
θ
r
2
sin
θ
∂
f
∂
θ
=
0
\begin{equation}\begin{aligned}&\frac{\partial ^2f}{\partial x^2}+\frac{\partial ^2f}{\partial x^2}+\frac{\partial ^2f}{\partial x^2}\\=&\frac{\partial ^2f}{\partial r^2} +\frac{1}{r^2}\frac{\partial ^2f}{\partial \theta^2} +\frac{1}{r^2\sin^2\theta}\frac{\partial ^2f}{\partial \phi^2} +\frac{2}{r}\frac{\partial f}{\partial r} +\frac{\cos\theta}{r^2\sin\theta}\frac{\partial f}{\partial \theta}=0 \end{aligned}\end{equation}
=∂x2∂2f+∂x2∂2f+∂x2∂2f∂r2∂2f+r21∂θ2∂2f+r2sin2θ1∂ϕ2∂2f+r2∂r∂f+r2sinθcosθ∂θ∂f=0先将上式两边同时乘以
r
2
r^2
r2,再将上式的第1、4项,第2、5项进行合并将得到我们一般常见的拉普拉斯方程在球坐标下的形式如下:
∇
2
f
=
∂
∂
r
(
r
2
∂
f
∂
r
)
+
1
sin
θ
∂
∂
θ
(
sin
θ
∂
f
∂
θ
)
+
1
sin
2
θ
∂
2
f
∂
ϕ
2
=
0
\begin{equation}\nabla^2f=\frac{\partial}{\partial r}\left(r^2\frac{\partial f}{\partial r}\right)+\frac{1}{\sin\theta}\frac{\partial}{\partial \theta}\left(\sin\theta\frac{\partial f}{\partial\theta}\right)+\frac{1}{\sin^2\theta}\frac{\partial^2f}{\partial \phi^2}=0 \end{equation}
∇2f=∂r∂(r2∂r∂f)+sinθ1∂θ∂(sinθ∂θ∂f)+sin2θ1∂ϕ2∂2f=0至此我们完成了拉普拉斯算子球坐标形式的转化工作。


















 3860
3860

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









