






基于四轮驱动电动汽车控制平台实现了纵向速度和横向轨迹跟踪控制,横向算法基于模型预测控制的轨迹跟踪的仿真,实现了在一般附着系数路面跟踪平稳,高速低附着里面能够保证车辆控制的稳定性。
想学习mpc控制的可以看看这个,强烈推荐,提供一定的,一定的控制原理及代码讲解,助你一臂之力,并有对应论文可以参考学习,仿真中 carsim8.1版和matlab2016b
ID:28220709699135218
想剁手书屋14
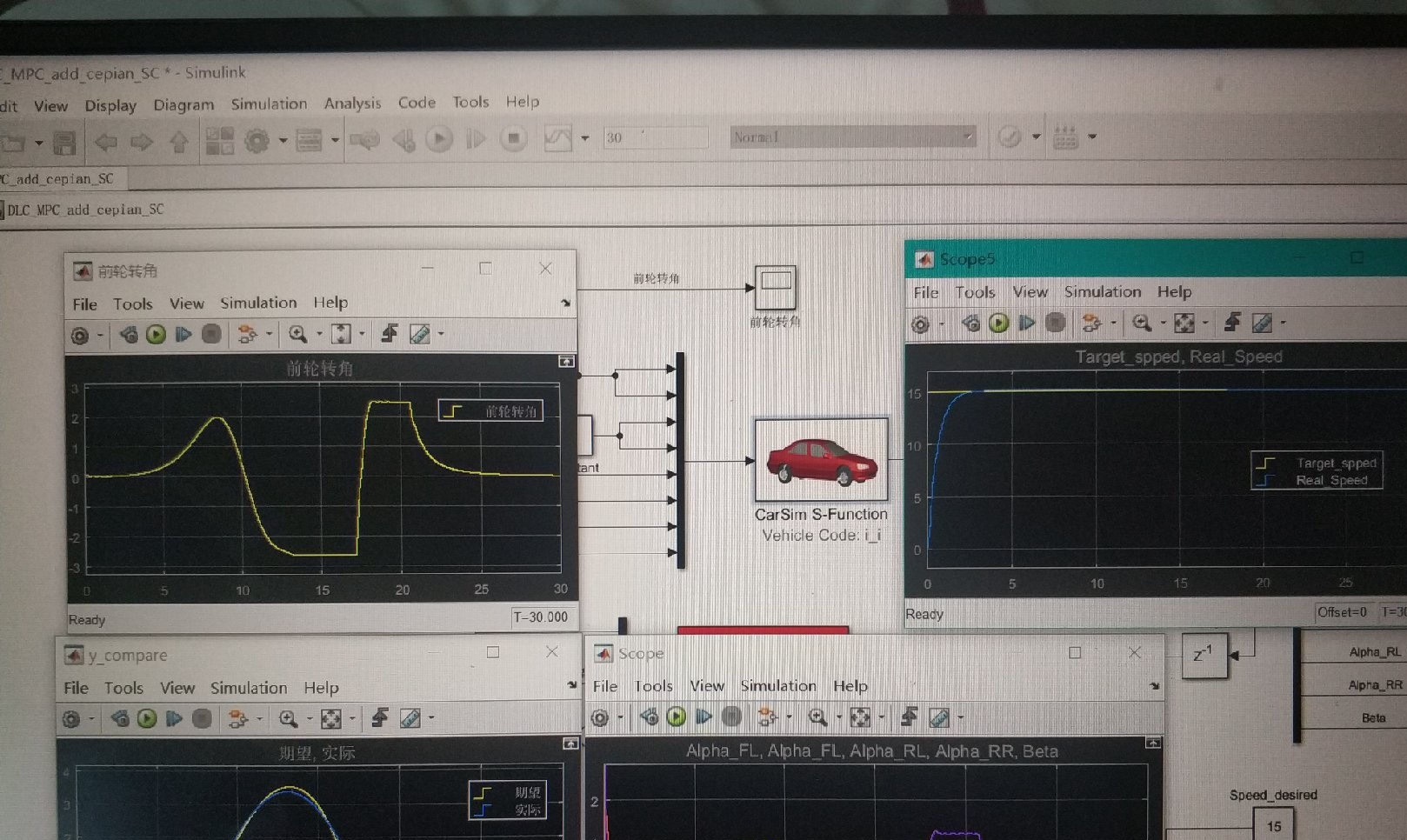
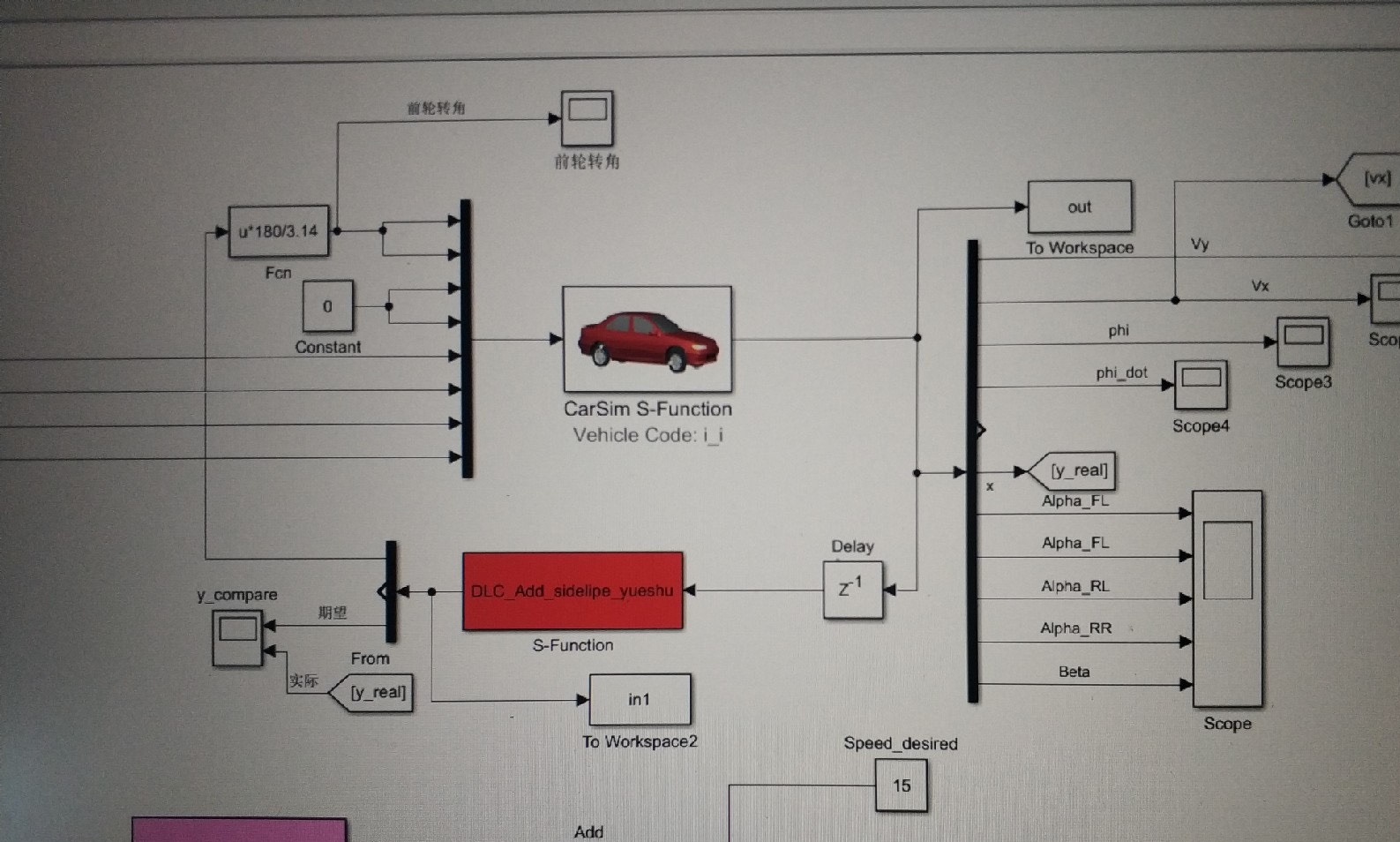
基于四轮驱动电动汽车控制平台实现了纵向速度和横向轨迹跟踪控制。纵向速度控制是指通过调节电动汽车的动力系统,使其能够按照预定的速度行驶。横向轨迹跟踪控制是指控制电动汽车按照预定的轨迹行驶,确保车辆在一般附着系数路面上跟踪平稳,同时在高速低附着条件下也能保持稳定性。
在这个基于四轮驱动电动汽车控制平台的控制系统中,横向算法采用了模型预测控制(Model Predictive Control, MPC)的方法来实现轨迹跟踪。MPC是一种先进的控制方法,它通过建立车辆的数学模型,预测车辆行驶的轨迹,并根据预测结果进行控制。MPC在控制过程中考虑了车辆的动力学特性、约束条件和目标函数,可以有效地实现车辆的轨迹跟踪控制。通过对模型进行仿真,可以验证MPC算法在不同路面条件下的控制效果。
为了实现纵向速度和横向轨迹跟踪控制,我们采用了Carsim8.1版和Matlab2016b软件进行仿真。Carsim8.1版是一款用于车辆动力学仿真的软件,它可以模拟车辆在不同路面上的行驶状况,包括附着系数的变化、转向角的调整等。Matlab2016b是一款强大的科学计算软件,它提供了丰富的控制算法库和仿真工具,可以方便地进行控制算法的设计和仿真验证。
对于想学习MPC控制的人来说,这个基于四轮驱动电动汽车控制平台的项目是一个很好的学习资源。它不仅提供了控制原理和代码讲解,还有相应的论文可供参考学习。通过对基于模型预测控制的轨迹跟踪算法的研究和仿真实验,可以更好地理解和掌握MPC控制方法的原理和应用。
总之,基于四轮驱动电动汽车控制平台实现纵向速度和横向轨迹跟踪控制的项目是一个具有实际意义和学术价值的研究。通过该项目的学习和研究,不仅可以提升对电动汽车控制的认识和理解,还能够深入学习和应用MPC控制方法。对于对控制算法和电动汽车技术感兴趣的人来说,这个项目是一个非常有价值的学习资源,强烈推荐大家去学习和探索。
【相关代码,程序地址】:http://fansik.cn/709699135218.html
















 580
580

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









