






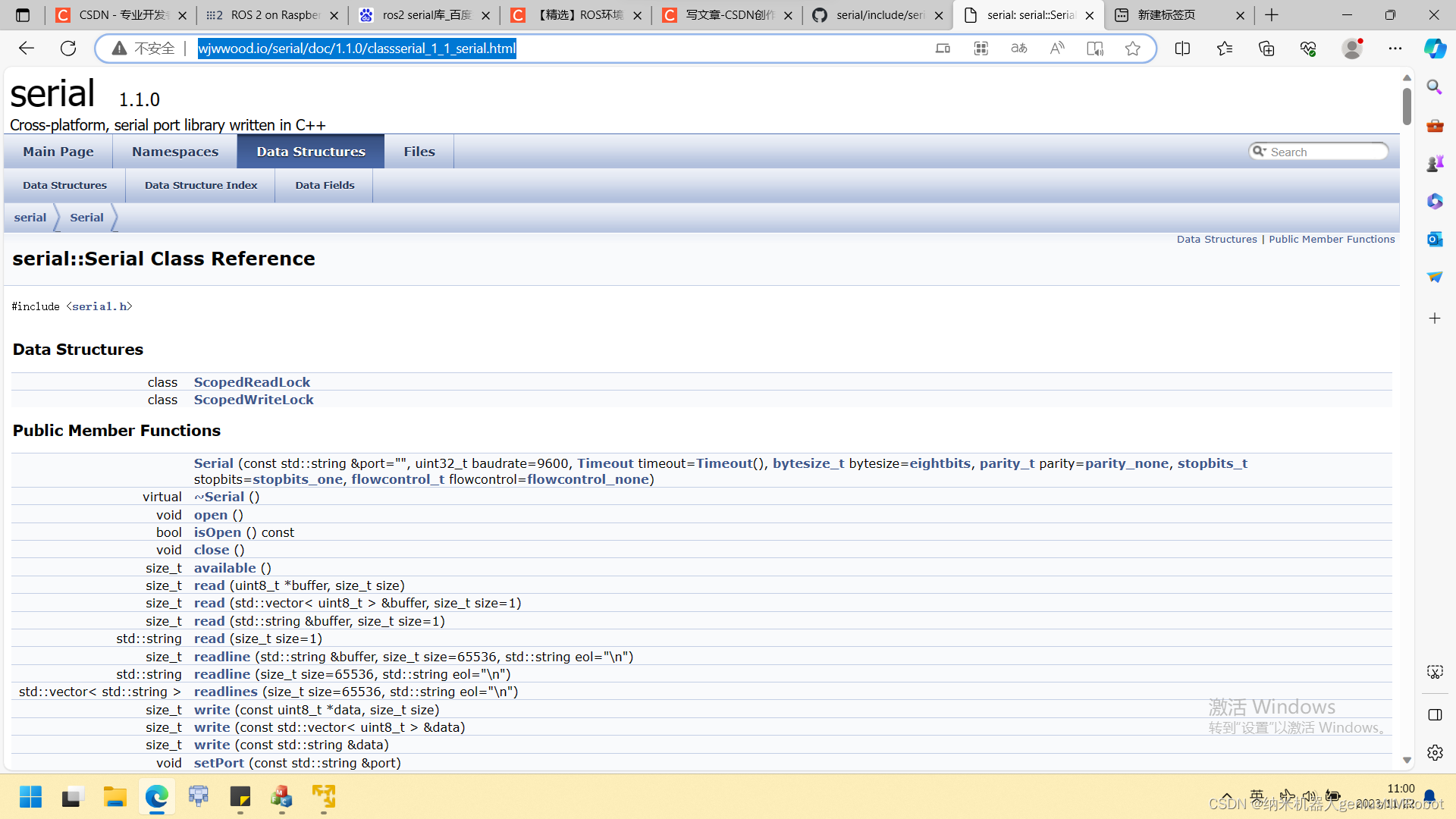
要的串口操作的API介绍在这里:serial: serial::Serial Class Reference (wjwwood.io)
这个库看起来还不错,还有个专门的网站,串口库就用这个吧
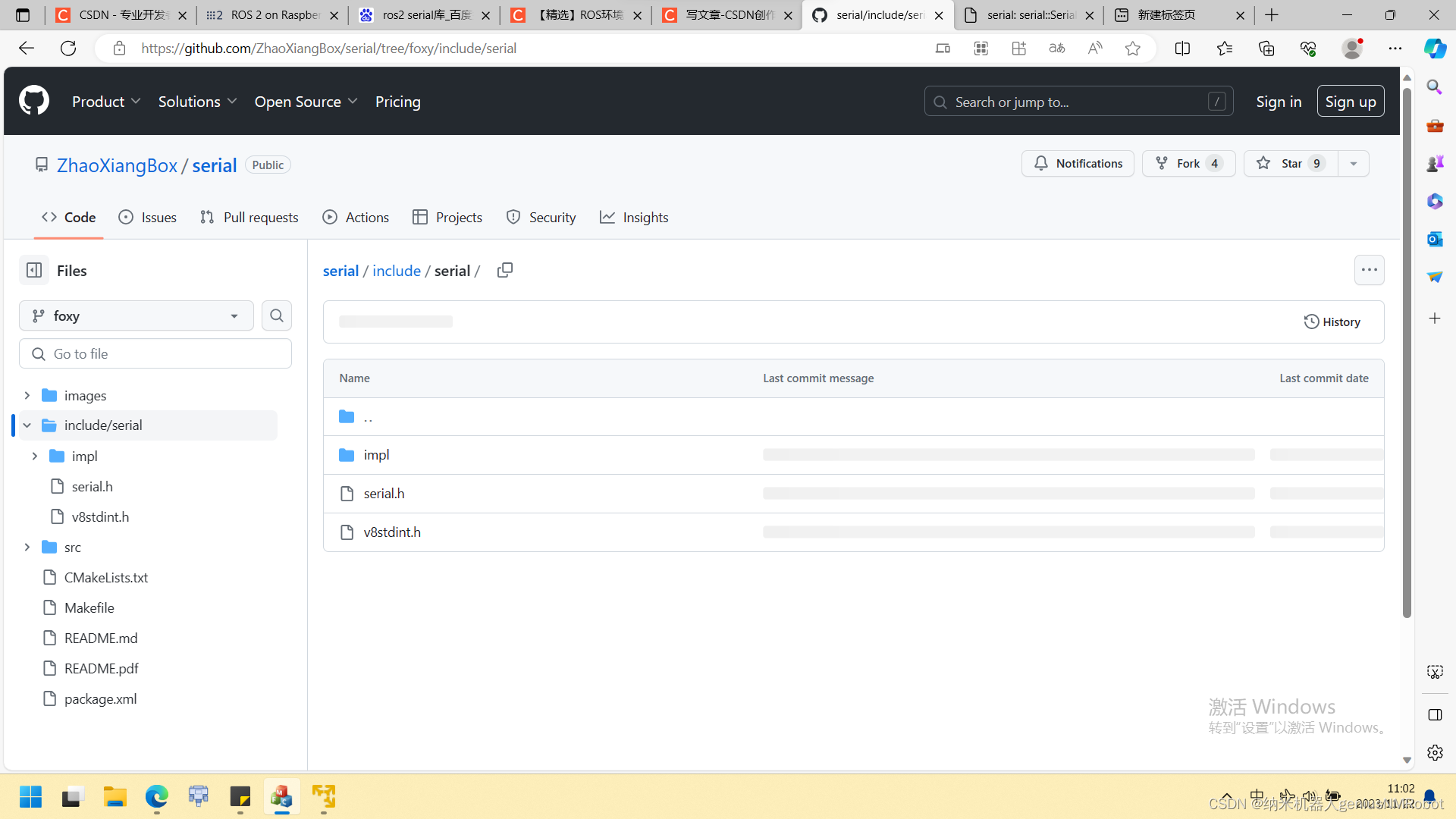
但是我们不是直接利用上面这个东西,而是使用的是根据这个改写的一个针对ros2的一个serial库,这个serial库是根据上面这个库改写来的,ros2的库在这里:https://github.com/ZhaoXiangBox/serial/tree/foxy/include/serial
关于这个ros2库相关的使用方式的例子可以参考下面这个博客:
需要注意的是:这个博客并不完整,应该是无法运行的:例如这个很重要的东西没有:
install(TARGETS
talker #这个是可执行文件名称例如talkerexe
DESTINATION lib/${PROJECT_NAME})还有最后需要编译的时候需要这样:
cd serial_demo
colcon build --packages-select serial_demo
#这个格式应该都知道了:colcon build --packages-select 包名
#还有就是ros2一再强调的需要source
source install/setup.bash
#或者干脆把这一句放到~/.bashrc的末尾去 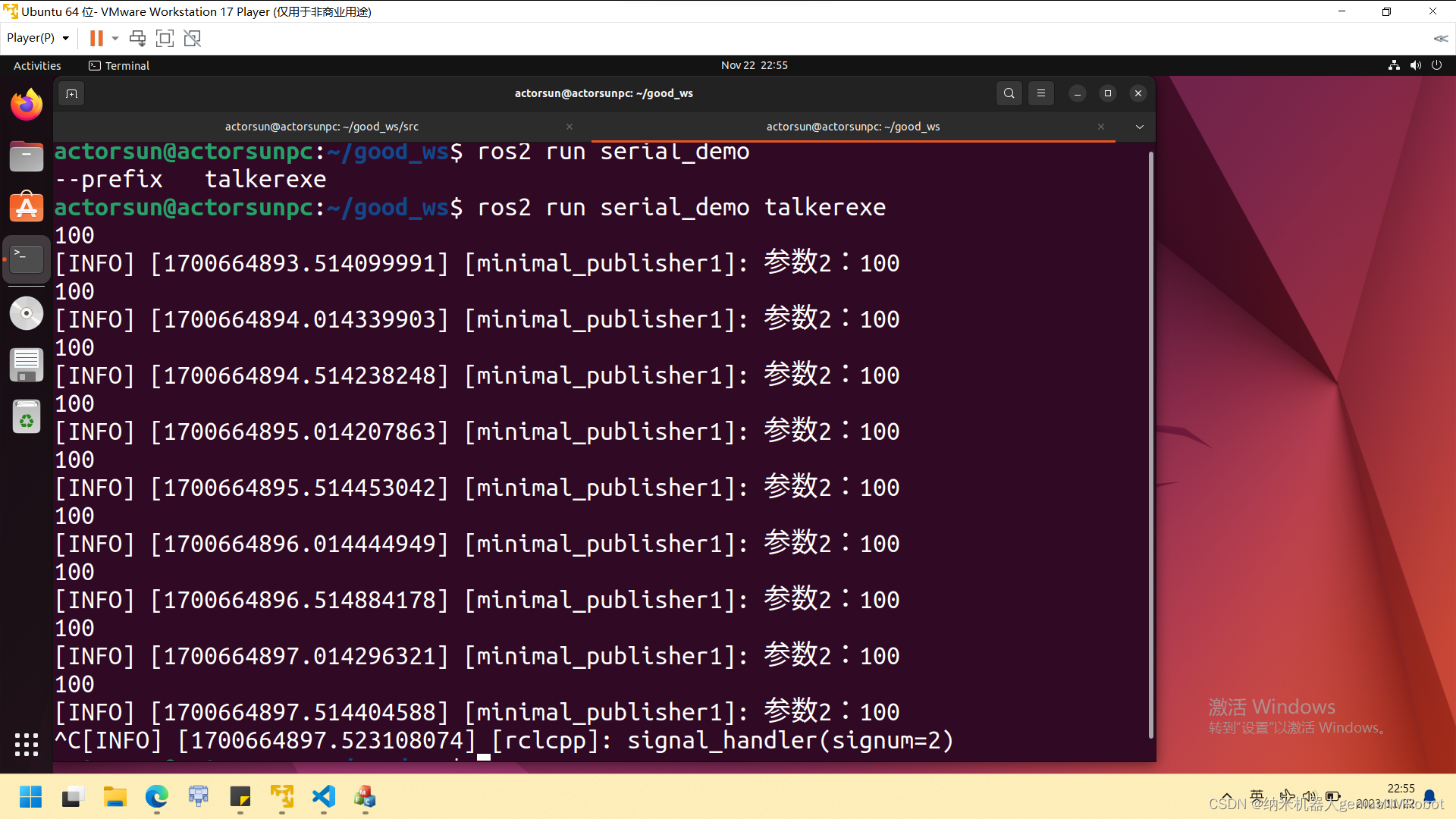
https://blog.csdn.net/weixin_53035484/article/details/128135356

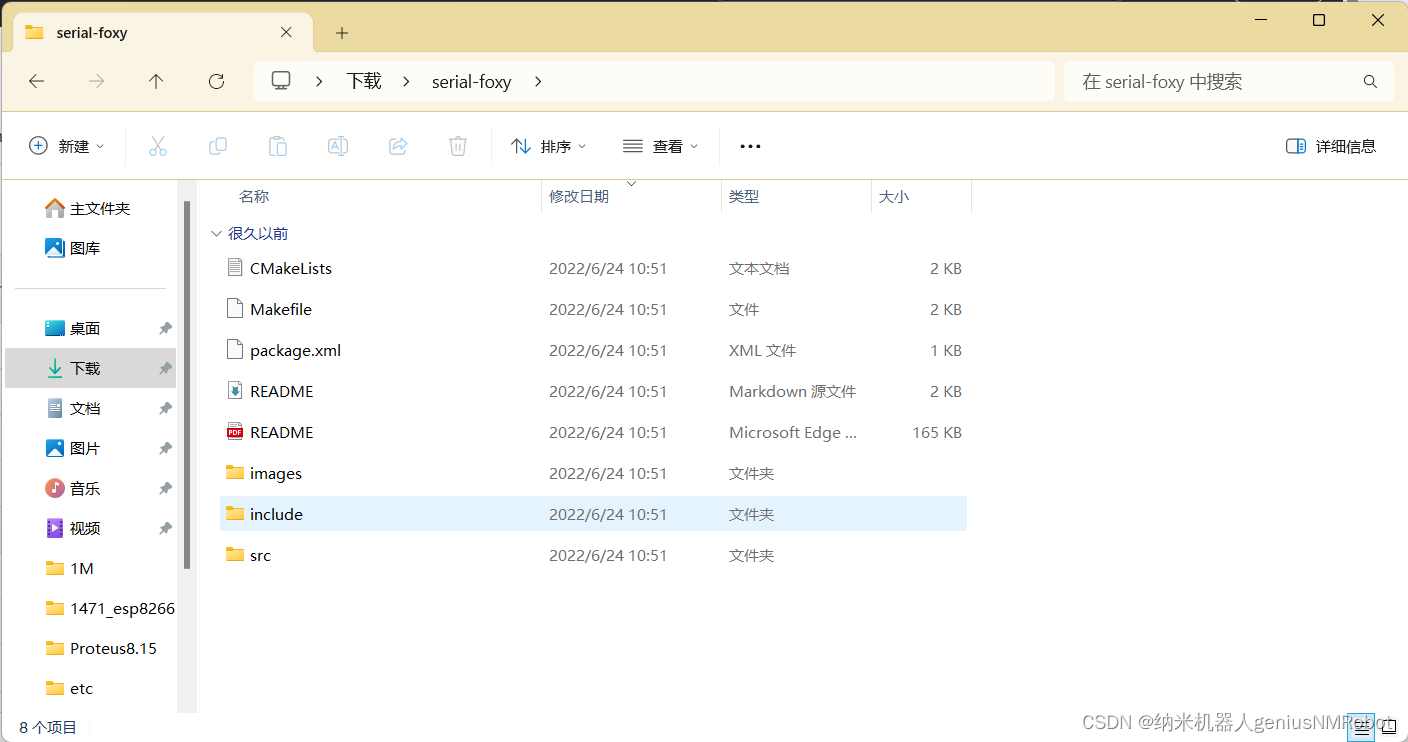
如果网页太慢那个serial库可以从这里下载:【免费】ros2-humble串口通信serial库资源-CSDN文库
这个压缩包下载以后是这个样子的:
网页结构是这个样子的:
可以看到他们的结构是完全一样的,内容应该也是完全一样的



















 365
365

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











