






 超级会员免费看
超级会员免费看
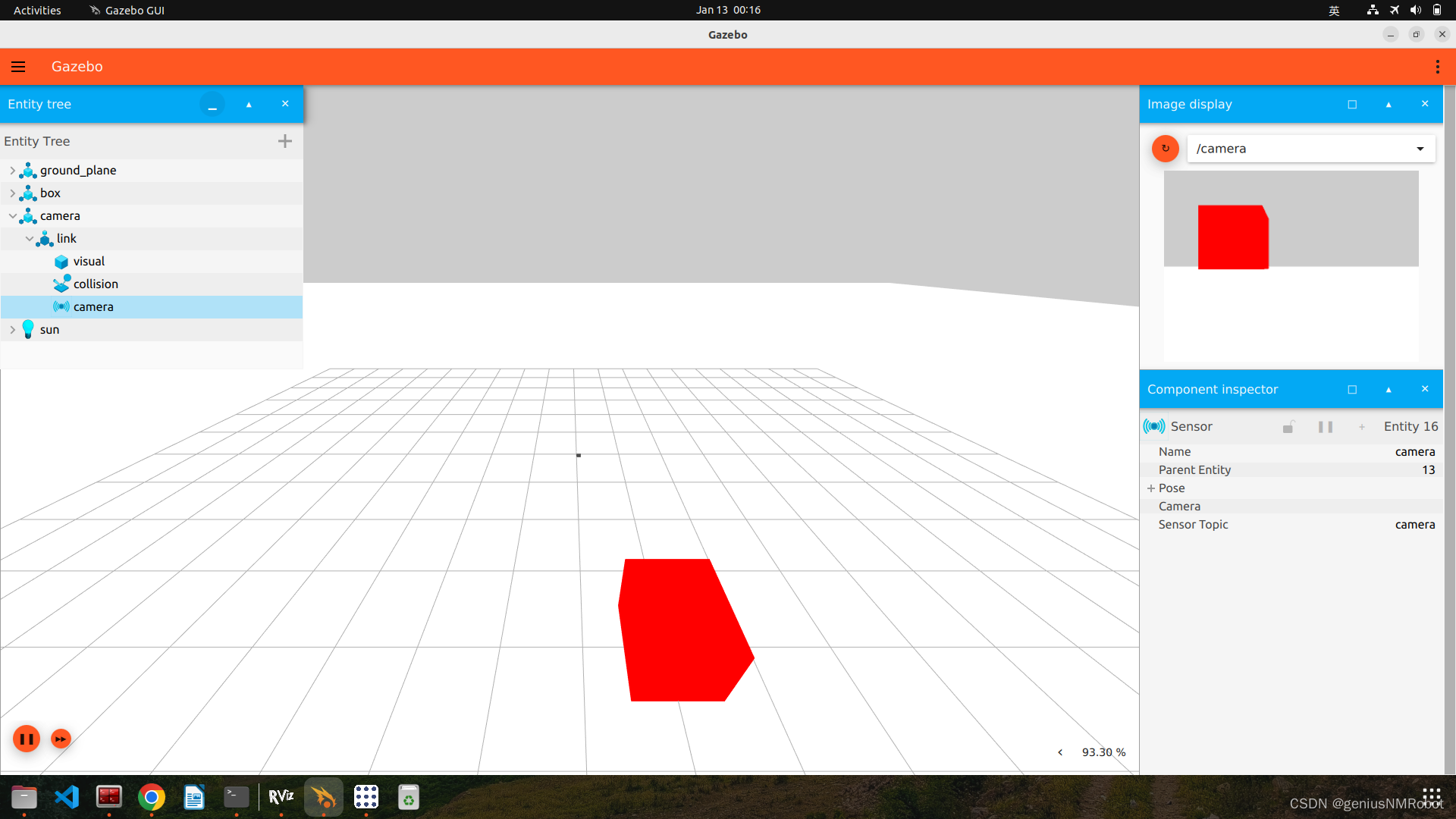

各位看:随着大物体的移动,在涉嫌头的位置也发生了改变-----右上角那个/camera的位置也变了
右上角那个是摄像头图案,以下是仓库链接:
ros-ign-gazebo-camera: https://github.com/arashsm79/ros-ign-gazebo-camera.git一个ros2+摄像头的示例
如果你输入:
ros2 topic list 
输入:
ros2 topic echo /camera
各位看:随着大物体的移动,在涉嫌头的位置也发生了改变-----右上角那个/camera的位置也变了
右上角那个是摄像头图案,以下是仓库链接:
ros-ign-gazebo-camera: https://github.com/arashsm79/ros-ign-gazebo-camera.git一个ros2+摄像头的示例
如果你输入:
ros2 topic list
输入:
ros2 topic echo /camera










 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文
















 1042
1042







