






以下将会展示在ros学习过程中的经验和想法,目的是为了理清学习的思路,学习主要参考路径为billbill中虚左&古月居,主要使用的是c++编写,这里默认已经装好了ubuntu和ros1
补充:
如果是想定位到计算机,直接按删除键,就会不断退回上一级
cd .. 返回上一个工作目录
如果是不想重复刷新环境变量,就在终端输入
vi .bashrc然后滑到最下面一行,输入
source /home/hcx/catkin_ws/devel/setup.bash
获取当前所有的话题:
rostopic list通过ctrl+"+"可以实现vscode字体的放大或者缩小
一、首先将详细介绍怎么直接在终端运行c++和python的程序
两者在运行之前,都要实现一个共同条件:
首先
配置一个工作环境,两者都是要有工作环境才能运行
mkdir -p 自定义空间名称/src
cd 自定义空间名称
catkin_make
注意:自定义空间可以任意起,比如我起的是demo01,那么直接在“自定义空间名称”输入“demo01”即可,第二个cd就是进入空间的意思,因为第一行代码只是创建了一个空间,创建用的是“mkdir”,对于创建文件夹也是类似,catkin_make可以理解成是装饰好内部环境,就是给房子装修,进去就是以下样子(先cd工作空间才能catkin_make,然后会生成三个文件)

2.装饰好,就要开始配置ros包,进入src目录,输入以下命令,或者可以从终端直接通过cd指令进入,这里cd进入是要遵循一个递进原则,不能直接cd就进入,进入一个小的空间同时就要先进入小的空间所在的大空间。
cd src
catkin_create_pkg 自定义ROS包名 roscpp rospy std_msgs
std_msgs是标准消息库,包含了一些常用的消息类型
注意:ros包名字也是可以任取的,在“自定义ros包名”一栏输入即可,后面3个是依赖包,就是用这些语言来实现编程,一般都是这三个
在基础的配置好后(工作环境+功能包),就可以开始实现编程
1、cpp
首先是源文件问题,可以通过查看ros包的cmaker,其中cpp对应136左右,python对应163左右,是通过这两个来确定文件夹,比如cpp就是src,然后python就是scripts,但是在ros包里面是不存在scripts文件夹的,就需要自己创建,然后这也是py不同于c++的地方。
现在先讲解cpp源文件的编写:
首先进入ros包里面的src(注意,这里不是工作空间里面的src,而是src里面的ros功能包),然后新建文本文件,重命名,当然,重命名的文件后缀要加上cpp,不然写不了cpp文件,加上cpp后,写入以下程序:
#include "ros/ros.h"
int main(int argc, char *argv[])
{
//执行 ros 节点初始化
ros::init(argc,argv,"hello");
//创建 ros 节点句柄(非必须)
ros::NodeHandle n;
//控制台输出 hello world
ROS_INFO("hello world!");
return 0;
}
写完之后,点保存,回到ros包,就是退一步,编辑 ros 包下的 Cmakelist.txt文件,按照下面方式编辑(实际上是去掉注释,加上源文件名)
add_executable(步骤3的源文件名
src/步骤3的源文件名.cpp
)
target_link_libraries(步骤3的源文件名
${catkin_LIBRARIES}
)
注意:观察上图,其中有3个都是‘步骤3的源文件’,暂且编号为1,2,3。其中1号是名字,这是可以任意起的,3号和1号必须相同,2号要跟ros中src(就是存放源文件的位置)中cpp源文件名字一样,以上准备工作完成后,就可以开始配置文件,并且编译执行了,其实是可以三个都一样的,这样方便一些。
回到工作空间,就是一开始的那个工作空间,输入以下程序(或者通过cd回去),进行编译:
catkin_make这样子就是开始编译了,等他编译完成,就要重新开一个终端,执行以下程序(启动ros的主节点,保证程序顺利运行):
roscore
但是有时候是运行不了的,就比如前面已经执行了某个程序(已经启用了ros主节点),可以在roscore那个终端,输入以下命令(强制杀死进程),或者直接将前面的叉掉,或者是ctrl+c强制停止:
killall -9 roscore //如果提示未找到进程不用管,继续执行下一条
killall -9 rosmaster跑完roscore后,就可以执行代码了,在工作空间打开终端,输入以下程序(先刷新环境变量,再跑程序),古月提到一种不用刷新环境变量的方法:
source ./devel/setup.bash
rosrun 包名 C++节点跑程序:rosrun ros包功能包名称(自己起的)程序名称(这个程序名称指的是在cmake里面所命名的),当然,三者间要加入空格,空格十分重要。
然后,就成功执行了,执行的是info,就是源文件里面所写那个。
cpp:
![]()

py:

2、python
python要先在ros包里面新建一个文件夹:
mkdir scripts然后在文件夹里面新建一个文本文档,记住后缀一定要加上:py,然后写下以下程序:
#! /usr/bin/env python
"""
Python 版 HelloWorld
"""
import rospy
if __name__ == "__main__":
rospy.init_node("Hello")
rospy.loginfo("Hello World!!!!")
第一行是一定要加上的!!!
然后python很特殊,要配置权限(在scripits里面):
chmod +x 自定义文件名.py然后回到ros包,打开cmaker(大概163的位置),自定义文件名要和scripits里面源文件的文件名一致,或者直接qu'xiao:
catkin_install_python(PROGRAMS scripts/自定义文件名.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)然后返回空间编译 :
catkin_make等待,然后新建终端,执行:
roscore执行不了看之前cpp配置那里
然后在回到工作空间,执行:
source ./devel/setup.bash
rosrun 包名 自定义文件名.py二、接着介绍怎么在vs code上运行cpp和python
vs code有个很不错的功能:自动填充,报错,自动填充可以在vs code的终端上用"Tab"键进行填充,因为在记事本上写代码比较麻烦,所以建议在vs code上运行(参考虚左)。
vs code下载版本,可以直接在主机上面下载好再移动到虚拟机上面,在虚拟机上面比较卡。
![]()
1.cpp
其实开始的操作都是很类似的,在虚拟机中,直接用快捷键CTRL+ALT+T新建终端
首先,输入以下代码创建工作空间:
mkdir -p xxx_ws/src(必须得有 src)
cd xxx_ws
catkin_make然后,第二步就是打开vscode(当然是从工作空间里面进入,但是在第一步执行了catkin_make之后,会默认在工作空间,所以可以忽略下面的cd):
cd xxx_ws
code .注意:英文句号要空格隔开!!!
进入之后,因为想要方便编译,就不要经常都是输入:catkin_make 进行编译,可以在vscode里面配置,然后每次都是要重新配置的:
{
// 有关 tasks.json 格式的文档,请参见
// https://go.microsoft.com/fwlink/?LinkId=733558
"version": "2.0.0",
"tasks": [
{
"label": "catkin_make:debug", //代表提示的描述性信息
"type": "shell", //可以选择shell或者process,如果是shell代码是在shell里面运行一个命令,如果是process代表作为一个进程来运行
"command": "catkin_make",//这个是我们需要运行的命令
"args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2”
"group": {"kind":"build","isDefault":true},
"presentation": {
"reveal": "always"//可选always或者silence,代表是否输出信息
},
"problemMatcher": "$msCompile"
}
]
}
键盘输入ctrl+shirt+b,会弹出一个东西(因为这里没有是新建工作区,就不会显示,一般会显示两个,然后点击短的(第二个)那个小齿轮(一般写着catkin_built),把以上代码复制进去就可以了):

然后就开始新建功能包,鼠标右键点击工作区下的str,下面会有个create catkin package,点击,就是新建工作区,然后如上图那个地方会要你填两个参数:
1.功能包名字
2.依赖(一般是roscpp、rospy、std_msgs)
然后写程序步骤就和之前差不多:
(1)ros包下面str新建文本文档,后缀为.cpp
/*
控制台输出 HelloVSCode !!!
*/
#include "ros/ros.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");//防止中文报错
//执行节点初始化
ros::init(argc,argv,"HelloVSCode");
//输出日志
ROS_INFO("Hello VSCode!!!哈哈哈哈哈哈哈哈哈哈");
return 0;
}
以下代码意思:让最后输出中文不会报错
setlocale(LC_ALL,"");(2) 回到ros包,改cmaker的环境变量(步骤和之前说的一样,136)
add_executable(步骤3的源文件名
src/步骤3的源文件名.cpp
)
target_link_libraries(步骤3的源文件名
${catkin_LIBRARIES}
)
(3) 改完之后,编译的话,不用跑回终端,直接用快捷键ctrl+shirt+b就可以实现编译
(4)新建终端:在右下角,很容易看见,他会直接跳到工作空间,输入roscore
(5) 再新建终端:
source ./devel/setup.bash
rosrun ROS包名 ros包含的str里面的源文件名字2.python
python在很大程度上和cpp差不多,以下为一些不同点
1.需要在ros包新建文件夹:scripts
2.python写程序:
#! /usr/bin/env python
"""
Python 版本的 HelloVScode,执行在控制台输出 HelloVScode
实现:
1.导包
2.初始化 ROS 节点
3.日志输出 HelloWorld
"""
import rospy # 1.导包
if __name__ == "__main__":
rospy.init_node("Hello_Vscode_p") # 2.初始化 ROS 节点
rospy.loginfo("Hello VScode, 我是 Python ....") #3.日志输出 HelloWorld注意:以下一行不能漏,是配置可执行权限的!!!
然后写完程序,还要在终端添加可执行权限,要鼠标右键点击scripts然后在终端打开:
chmod +x 自定义文件名.py
或者可以添加全部py文件的可执行权限:
chmod +x *.py
修改配置文件,163
catkin_install_python(PROGRAMS scripts/自定义文件名.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)编译:ctrl+shirt+b
新建窗口输入:roscore
这是如果是打开了其他终端,想要回去工作空间的话,要输入:
cd ~/工作空间名称/注意:是~这个波浪线
然后source......../devel/setup.bash
rosrun......功能包........文件名.....
三、话题通信的实现
基本的模型图:
可以简单理解成发布者是发布消息,然后订阅者是接受消息,本节程序主要功能是:创建小海龟(官方已经给了库,直接调用),让小海龟动起来,其中发布者主要功能就是:实时发布速度信息。动起来后,小海龟位置不断变化,其中订阅者功能主要功能就是:实时反馈小海龟的位置坐标信息(x轴和y轴)

更具体的模型图:
rosmaster相当于一个管理者的角色,即roscore,发布者发布信息,包括话题,地址,如果发布者发布的信息是订阅者需要的,那么两者可以构成通信,实现交互,但是有时候订阅者接受不到前几条信息,这是因为发布者发布信息的时候速度快,管理者还没配置好,此时可以在发布者中输入:
ros::Duration(3).sleep();//这一句是延时3秒的意思,延时之后,先让发布者进行休眠,让订阅者先启动,就能不丢失信息

如果想要直观的看到发布者和订阅者之间的关系,可以调用计算图(在终端输入)
rqt_graph1、发布者
缺乏依赖,要改两个地方:
一/package

二/cmake
补充:终端输入rostopic echo 话题名称
可以直接打印出发布者的发布信息
字符串的拼接:引入sstream头文件,比如我是拼接hello和count,就采用以下方式
#include <sstream>
ros::stringstream ss;
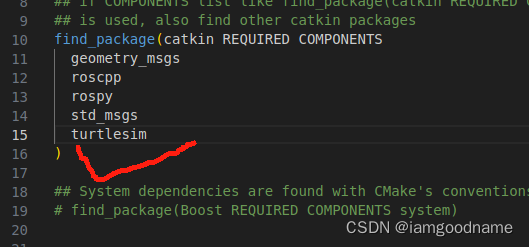
ss<<"hello -->"<<count;一些基本的步骤是不变的:1.创建工作空间;2.在src目录创建功能包(功能包的依赖有所改变,如下图所示,主要在建立功能包的时候新增了geometry_msgs,turtlesim(这是要调用官方小海龟要添加的));3,在功能包里面编写代码(cpp用到src,python需要新建scripts);4.编译执行(这次观看古月视频,发现可以通过一个步骤删去重新配置环境的步骤(source devel/setup.bash),正常来说是要重新配置环境才能进行rosrun(跑程序)),(还发现一个技巧:CTRL+H(隐藏或者显示文件,特别好用)),编译cpp和py也是不同的,py需要给权限

cpp
(在ros包的src里面新建后缀为c的文件)
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc,char **argv)
{
//节点初始化
ros::init(argc,argv,"publisher");
//创建节点句柄
ros::NodeHandle n;
//创建发布者,发布名为turtle1/cmd_vel的话题,消息类型为<geometry_msgs::Twist>,队列长度为10
ros::Publisher turtle_vel_pub=n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel",10);
//设置循环频率
ros::Rate loop_rate(10);
int count=0;
while(ros::ok())
{
geometry_msgs::Twist vel_msg;
//线速度
vel_msg.linear.x=0.5;
//角速度
vel_msg.angular.z=0.2;
//发布消息
turtle_vel_pub.publish(vel_msg);
ROS_INFO("Publish turtle velocity command[%0.2f m/s,%0.2f rad/s]",
vel_msg.linear.x,vel_msg.angular.z);
loop_rate.sleep();
}
return 0;
}配置好后,改cmake:
add_executable(publisher_c src/publisher_c.cpp)
target_link_libraries(publisher_c ${catkin_LIBRARIES})然后CTRL+shirt+b(注意:前提是配置好一键编译)
一键编译配置路径:

编译完后,开终端:rosrun
然后配置环境,先输入海龟的生成:
rosrun turtlesim turtlesim_node如果想要海龟自己跑(可以自己用上下左右键控制海龟运动,但是那个光标要在键盘控制命令的终端里):
rosrun turtlesim turtle_teleop_key 然后再新开终端(重新用source配环境)
rosrun learning_topic publisher_c注意,这里有个很奇怪的点,就是跑cpp程序时不用加后缀,但是如果是跑py程序时一定要后缀,比如:
rosrun learning_topic publisher_py.py不然py的运行不了
py
然后对于py的,和cpp差不多,这里将一下代码,在ros包新建scripts,然后输入:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
########################################################################
#### Copyright 2020 GuYueHome (www.guyuehome.com). ###
########################################################################
# 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist
import rospy
from geometry_msgs.msg import Twist
def velocity_publisher():
# ROS节点初始化
rospy.init_node('publisher', anonymous=True)
# 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10
turtle_vel_pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)
#设置循环的频率
rate = rospy.Rate(10)
while not rospy.is_shutdown():
# 初始化geometry_msgs::Twist类型的消息
vel_msg = Twist()
vel_msg.linear.x = 0.5
vel_msg.angular.z = 0.2
# 发布消息
turtle_vel_pub.publish(vel_msg)
rospy.loginfo("Publish turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z)
# 按照循环频率延时
rate.sleep()
if __name__ == '__main__':
try:
velocity_publisher()
except rospy.ROSInterruptException:
pass
然后千万记得给权限,不然不给你干活:
chmod +x 自定义文件名.py
然后按照上面步骤走就可以,cmakes不要忘记,py的cmakes也是要后缀,就是rosrun记得加后缀,为什么呢,可能和devel文件有关,因为不加后缀他找不到py这个文件了,然后在devel里面就这样子显示(就py文件比较奇怪):

2、订阅者
补充:有时候发布者比订阅者先启动,就会使得订阅者错失消息,那么可以在发布者的循环之前,加上休眠:
ros::Duration().sleep();
//催眠多少直接在duration里面填入相应的参数即可,注意单位是s总体来说,和发布者差不多:
1.cpp
cpp文件代码:
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose
*/
#include <ros/ros.h>
#include "turtlesim/Pose.h"
// 接收到订阅的消息后,会进入消息回调函数
void poseCallback(const turtlesim::Pose::ConstPtr& msg)
{
// 将接收到的消息打印出来
ROS_INFO("Turtle pose: x:%0.6f, y:%0.6f", msg->x, msg->y);
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, "pose_subscriber");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallback
ros::Subscriber pose_sub = n.subscribe("/turtle1/pose", 10, poseCallback);
// 循环等待回调函数
ros::spin();
return 0;
}
配置cmake:
add_executable(pose_subscriber src/pose_subscriber.cpp)
target_link_libraries(pose_subscriber ${catkin_LIBRARIES})2.py

文件代码:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
########################################################################
#### Copyright 2020 GuYueHome (www.guyuehome.com). ###
########################################################################
# 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose
import rospy
from turtlesim.msg import Pose
def poseCallback(msg):
rospy.loginfo("Turtle pose: x:%0.6f, y:%0.6f", msg.x, msg.y)
def pose_subscriber():
# ROS节点初始化
rospy.init_node('pose_subscriber', anonymous=True)
# 创建一个Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallback
rospy.Subscriber("/turtle1/pose", Pose, poseCallback)
# 循环等待回调函数
rospy.spin()
if __name__ == '__main__':
pose_subscriber()
配置cmake:
catkin_install_python(PROGRAMS
scripts/pose_subscriber.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)四、launch文件封装
如果节点数量很多,一个一个执行起来很麻烦,这时候就要用到launch文件,一键执行全部节点
launch文件的建立和c++,py的可编译文件建立也是很类似的

由上图可以看出,先新建一个功能包,添加依赖,常用依赖就是roscpp rospy std_msgs,然后在str目录下面,右击新建文件,文件的后缀一定要是.launch,建好后,就可以输入指令:
<launch>
<node pkg="" type="" name="" output="screen" />
</launch>
以上是一个最基础的一个框架,pkg是功能包的名称,想封装哪些文件,就要先找到相应的功能包,type是可执行节点 ,如果是封装cpp的话,将相应的文件去掉后缀即可,name是自己起的名字,根据自己喜好决定,主要就是起到一个区分的作用,output就是输出到哪里的意思,以上是“screen”,就是输出到屏幕上。
然后还能在内部添加很多指令,是添加到
<node pkg="" type="" name="" output="screen" />
里面,用空格隔开即可,然后每次都要重编译(好像保存也是可以的)
常用的launch指令集:
pkg="包名"
节点所属的包
type="nodeType"
节点类型(与之相同名称的可执行文件)
name="nodeName"
节点名称(在 ROS 网络拓扑中节点的名称)
args="xxx xxx xxx" (可选)
将参数传递给节点
machine="机器名"
在指定机器上启动节点
respawn="true | false" (可选)
如果节点退出,是否自动重启
respawn_delay=" N" (可选)
如果 respawn 为 true, 那么延迟 N 秒后启动节点
required="true | false" (可选)
该节点是否必须,如果为 true,那么如果该节点退出,将杀死整个 roslaunch
ns="xxx" (可选)
在指定命名空间 xxx 中启动节点
clear_params="true | false" (可选)
在启动前,删除节点的私有空间的所有参数
output="log | screen" (可选)
日志发送目标,可以设置为 log 日志文件,或 screen 屏幕,默认是 log编写好launch之后,CTRL+SHIRT+B编译,打开终端,不用roscore,但是要更新环境变量:
source devel/setup.bash然后,直接跑程序:
roslaunch 功能包名 launch文件名五、服务通信的实现
概念图:
注意也是通过相同话题将client和server链接在一起
client(客户端)和server(服务端),客户端需要完成某种需求,将需求发送给ros master,master为其找到合适的服务端,服务端处理好之后将结果反映给客户端。一个节点向另一个节点发数据,然后另一个节点响应。

主要实现流程:
1.srv的实现
定义srv,类似msg消息的创建
1.新建一个ros包,给好依赖
2.在ros包新建一个文件夹(可命名为srv),然后在该文件夹下新建后缀为srv的文件,输入文本(就是想发什么,然后想得到什么),需求和响应用”---“隔开,如下图
新建srv文件夹以及srv文件

在srv文件内定义想得到什么消息

3.编辑配置文件
- message_generation:这是一个编译时需要的软件包。在开发过程中,当需要定义新的ROS消息时,message_generation包会被用来生成必要的代码,这些代码允许ROS系统理解和处理这些新定义的消息。
- message_runtime:这是一个运行时需要的软件包。当ROS系统运行并且需要处理消息时,message_runtime包就会被使用。它提供了运行时支持,使得ROS节点能够发布和订阅消息。
(1)package.xml
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>(2) CmakeLists
开头
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
# 需要加入 message_generation,必须有 std_msgs
约58行
add_service_files(
FILES
AddInts.srv(创建的srv文件的名称)
)
约72行
generate_messages(
DEPENDENCIES
std_msgs
)
约105行
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES plumbing_server_client
CATKIN_DEPENDS roscpp rospy std_msgs message_runtime
# DEPENDS system_lib
)然后ctrl+shirt+b一键编译
2.具体路径配置
为了防止跑异常,需要在(vscode)c_cpp_properies.json上的path中输入include的路径,路径可以通过右击打开include的集成终端,输入pwd,然后直接将路径复制,把路径粘贴到include_path中,记得复制上去之后,前一条路径后面要加上"," ,不然会跑异常


"/xxx/yyy工作空间/devel/include/**" //配置 head 文件的路径 3.在ros包的src目录新建文件
1.服务端(server)
1.新建后缀为cpp的文件
输入以下代码,这个是实现两个整数相加减的,但是大概流程是这样
第二个include,包含的是<功能包名字/srv的文件名.h>
节点名称保持唯一,但是可以自己按照喜好起
创建对象部分,输入的参数是<话题+回调函数>,回调函数返回的是布尔类型
回调函数返回布尔类型的数,因此在回调函数前面加上bool
回调函数的引用参数(ros功能包名::srv文件去掉后缀,然后其他就是按模板来,就是请求对象和响应对象)
/*
需求:
编写两个节点实现服务通信,客户端节点需要提交两个整数到服务器
服务器需要解析客户端提交的数据,相加后,将结果响应回客户端,
客户端再解析
服务器实现:
1.包含头文件
2.初始化 ROS 节点
3.创建 ROS 句柄
4.创建 服务 对象
5.回调函数处理请求并产生响应
6.由于请求有多个,需要调用 ros::spin()
*/
#include "ros/ros.h"
#include "ros package/srv.AddInts.h"
// bool 返回值由于标志是否处理成功
bool doReq(demo03_server_client::AddInts::Request& req,
demo03_server_client::AddInts::Response& resp){
int num1 = req.num1;
int num2 = req.num2;
ROS_INFO("服务器接收到的请求数据为:num1 = %d, num2 = %d",num1, num2);
//逻辑处理
if (num1 < 0 || num2 < 0)
{
ROS_ERROR("提交的数据异常:数据不可以为负数");
return false;
}
//如果没有异常,那么相加并将结果赋值给 resp
resp.sum = num1 + num2;
return true;
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"AddInts_Server");
// 3.创建 ROS 句柄
ros::NodeHandle nh;
// 4.创建 服务 对象
ros::ServiceServer server = nh.advertiseService("AddInts",doReq);
ROS_INFO("服务已经启动....");
// 5.回调函数处理请求并产生响应
// 6.由于请求有多个,需要调用 ros::spin()
ros::spin();
return 0;
}
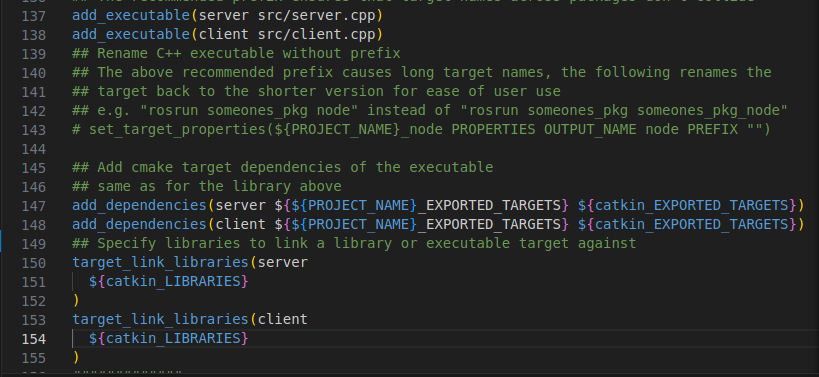
2.配置cmake
名称和cpp文件一致(约136行)
add_executable(AddInts_Server src/AddInts_Server.cpp)add_dependencies(AddInts_Server ${PROJECT_NAME}_gencpp)target_link_libraries(AddInts_Server
${catkin_LIBRARIES}
)3.跑程序
一般来说,编写完server是不会直接运行的,要有客户端发出请求,但是可以用内部程序测试:
先通过source更新环境,然后输入:(记得在话题名称后面,先输入一个空格隔开,再通过tab补齐,不然tab不会生效)
rosservice call 话题名称 +Tab此时可以通过键盘的左、右键去更改此时的输入参数,然后回车得到反映结果
2、客户端
在原来的ros包的src目录,新建后缀为cpp的文件
不用加回调函数了
第二个include也是<功能包名字/srv的文件名.h>
/*
需求:
编写两个节点实现服务通信,客户端节点需要提交两个整数到服务器
服务器需要解析客户端提交的数据,相加后,将结果响应回客户端,
客户端再解析
服务器实现:
1.包含头文件
2.初始化 ROS 节点
3.创建 ROS 句柄
4.创建 客户端 对象
5.请求服务,接收响应
*/
// 1.包含头文件
#include "ros/ros.h"
#include "demo03_server_client/AddInts.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 调用时动态传值,如果通过 launch 的 args 传参,需要传递的参数个数 +3
if (argc != 3)
// if (argc != 5)//launch 传参(0-文件路径 1传入的参数 2传入的参数 3节点名称 4日志路径)
{
ROS_ERROR("请提交两个整数");
return 1;
}
// 2.初始化 ROS 节点
ros::init(argc,argv,"AddInts_Client");
// 3.创建 ROS 句柄
ros::NodeHandle nh;
// 4.创建 客户端 对象
ros::ServiceClient client = nh.serviceClient<ros_package::AddInts>("topic");
//等待服务启动成功
//方式1
ros::service::waitForService("AddInts");
//方式2
// client.waitForExistence();
// 5.组织请求数据
demo03_server_client::AddInts ai;
ai.request.num1 = atoi(argv[1]);
ai.request.num2 = atoi(argv[2]);
// 6.发送请求,返回 bool 值,标记是否成功
bool flag = client.call(ai);
// 7.处理响应
if (flag)
{
ROS_INFO("请求正常处理,响应结果:%d",ai.response.sum);
}
else
{
ROS_ERROR("请求处理失败....");
return 1;
}
return 0;
}
然后配置相关文件,用cpp文件来配置
add_executable(AddInts_Client src/AddInts_Client.cpp)
add_dependencies(AddInts_Client ${PROJECT_NAME}_gencpp)
target_link_libraries(AddInts_Client
${catkin_LIBRARIES}
)
1.argv数组灵活应用
atoi()->强制转整型
.c_str()->转字符型
argc是一个整数,表示命令行参数的数量。argv是一个指针数组,每个元素指向一个命令行参数。- 比如运行节点 '' rosrun 功能包 my_program 10 20 '',那么argc等于3,因为有3个命令行参数,argv也是3,但是是以数组的形式存在,具体指向某个数,比如argv[ 0 ]=my_program,argv[ 1 ]=10,argv[ 2 ]=20
(假设我们需要输入两个数字)跑程序用到的命令行是
rosrun xxxxx(ros包) xxxxx(具体的程序名) 参数1 参数2而这个跑程序的命令行中,节点程序名+参数1+参数2 是我们需要输入的3个变量,那么argc=3,argv=3,然后可以用argv具体指代输入的参数,这样就可以不直接定义数字大小,实现自己手动输入参数
想实现自己输入数字,就比如想输入两个数字,可以用argv[ 1 ],argv[ 2 ]表示,但是这个获取的是字符串类型,需要用atoi()转为整形
2.如果想先启用客户端
一般只有启动服务器端,才能启动客户端
有两种方法:
1.简单一点
client.waitForExitence();2.难一点
topic是话题
ros::service::waitForService("topic");六、action通信的实现
action通信和服务通信的实现差不多,但是action通信应用性更广
1.实现场景
适用于操作耗时,需要得到连续反馈(就是在一段时间就会反馈一次,时间可以自己定,每次都能收到一个小结果,可以用百分比显示任务条)
2.通信接口图
红色为发送请求,蓝色为接受请求

1.定义action文件:
1.先创建一个ros功能包,依赖要包括以下内容(使用到actionlib):
roscpp rospy std_msgs actionlib actionlib_msgs创建好之后,建立一个文件夹来存放action的文件,文件夹名字可以自己取,但是创建的文件一定要后缀名为action ,action文件中,要包含以下3个内容(意思是得到的结果是什么,就启用什么类型),用点划线分割开:
#目标值
int32 num
---
#最终结果
int32 result
---
#连续反馈
float64 progress_bar
2.配置cmake
一共要改3个地方:
1.66行
add_action_files(
FILES
所创建的action文件名
)
2.72行(取消actionlib和std的注释)
generate_messages(
DEPENDENCIES
std_msgs
actionlib_msgs
)
3.107行(取消catkin那一行的注释)
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo04_action
CATKIN_DEPENDS roscpp rospy std_msgs actionlib actionlib_msgs
# DEPENDS system_lib
)
4.配置完之后,就可以ctrl+shirt+b进行一键编译(当然,进行这一步需要先配置一键编译,上文已经提及,最好是创建好文件,进入vs code就设置好一键配置)
5.在进行服务端客户端配置时,可以先将devel中include在集成终端中打开,输入pwd,将路径复制下来配置到c_cpp_properies.json
2.服务端
#include "ros/ros.h"
#include "actionlib/server/simple_action_server.h"
#include "ros文件/action文件Action.h"
//经常性使用,可以定义为Server
typedef actionlib::SimpleActionServer<demo01_action::AddIntsAction> Server;
void cb(const demo01_action::AddIntsGoalConstPtr &goal,Server* server){
//获取目标值
int num = goal->num;
ROS_INFO("目标值:%d",num);
//累加并响应连续反馈
int result = 0;
demo01_action::AddIntsFeedback feedback;//连续反馈
ros::Rate rate(10);//通过频率设置休眠时间,这里为1/10秒,就是0.1毫秒
for (int i = 1; i <= num; i++)//这是这里需要实现的功能函数,类似的,可以每次执行完,休眠一次
{
result += i;
//组织连续数据并发布
feedback.progress_bar = i / (double)num;//执行过程中需要反馈的结果
server->publishFeedback(feedback);
rate.sleep();
}
//设置最终结果
demo01_action::AddIntsResult r;
r.result = result;
server->setSucceeded(r);
ROS_INFO("最终结果:%d",r.result);
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
ROS_INFO("action服务端实现");
// 2.初始化ROS节点;
ros::init(argc,argv,"AddInts_server");
// 3.创建NodeHandle;
ros::NodeHandle nh;
// 4.创建action服务对象;然后以下是具体一些参数
/*SimpleActionServer(ros::NodeHandle n,
std::string name,
boost::function<void (const demo01_action::AddIntsGoalConstPtr &)> execute_callback,
bool auto_start)
*/
// actionlib::SimpleActionServer<ros包名::AddIntsAction> server(....);
Server server(nh,"主题",boost::bind(&cb,_1,&server),false);
server.start();
// 5.处理请求,产生反馈与响应;
// 6.spin().
ros::spin();
return 0;
}
写完之后,还需要配置cmake(3个地方!!!)
验证服务端是否可以正常运行:
//roscore
//source...
1.rosnode list
2.rostopic list
3.使用rostopic中的话题来验证
(1)rostopic pub /主题/goal +tab补齐
(2)直接改数据,就是自身提交输入
4.rostopic echo /主题/feedback
5.rostopic echo /主题/result ->得到结果,打印出结果3.客户端
#include "ros/ros.h"
#include "actionlib/client/simple_action_client.h"
#include "ROS包名/action文件Action.h"
typedef actionlib::SimpleActionClient<ros包名::AddIntsAction> Client;
//处理最终结果
void done_cb(const actionlib::SimpleClientGoalState &state, const demo01_action::AddIntsResultConstPtr &result){
if (state.state_ == state.SUCCEEDED)
{
ROS_INFO("最终结果:%d",result->result);
} else {
ROS_INFO("任务失败!");
}
}
//服务已经激活
void active_cb(){
ROS_INFO("服务已经被激活....");
}
//处理连续反馈
void feedback_cb(const demo01_action::AddIntsFeedbackConstPtr &feedback){
ROS_INFO("当前进度:%.2f",feedback->progress_bar);
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化ROS节点;
ros::init(argc,argv,"AddInts_client");
// 3.创建NodeHandle;
ros::NodeHandle nh;
// 4.创建action客户端对象;
// SimpleActionClient(ros::NodeHandle & n, const std::string & name, bool spin_thread = true)
// actionlib::SimpleActionClient<demo01_action::AddIntsAction> client(nh,"addInts");
Client client(nh,"addInts",true);
//等待服务启动
client.waitForServer();
// 5.发送目标,处理反馈以及最终结果;
/*
void sendGoal(const demo01_action::AddIntsGoal &goal,
boost::function<void (const actionlib::SimpleClientGoalState &state, const demo01_action::AddIntsResultConstPtr &result)> done_cb,
boost::function<void ()> active_cb,
boost::function<void (const demo01_action::AddIntsFeedbackConstPtr &feedback)> feedback_cb)
*/
demo01_action::AddIntsGoal goal;
goal.num = 10;
client.sendGoal(goal,&done_cb,&active_cb,&feedback_cb);
// 6.spin().
ros::spin();
return 0;
}
同样的也需要配置cmake文件
配置好之后,就可以直接运行了,运行的步骤也是类似的。
七、TF坐标变换
概念图:
1.雷达和小车(相对位置之间的转换,将物体与雷达转换为物体与小车)

2.带机械臂的机器人(具有多个坐标系)

1.静态坐标变换
常用的信息载体:
发布者和订阅者
geometry_msgs/TransformStamped
{
std_msgs/Header header #头信息
uint32 seq #|-- 序列号
time stamp #|-- 时间戳
string frame_id #|-- 坐标 ID
string child_frame_id #子坐标系的 id
geometry_msgs/Transform transform #坐标信息
geometry_msgs/Vector3 translation #偏移量
float64 x #|-- X 方向的偏移量
float64 y #|-- Y 方向的偏移量
float64 z #|-- Z 方向上的偏移量
geometry_msgs/Quaternion rotation #四元数
float64 x
float64 y
float64 z
float64 w
}
geometry_msgs/PointStamped
{
std_msgs/Header header #头
uint32 seq #|-- 序号
time stamp #|-- 时间戳
string frame_id #|-- 所属坐标系的 id
geometry_msgs/Point point #点坐标
float64 x #|-- x y z 坐标
float64 y
float64 z
}2.一般来说,功能包中的依赖有:
tf2、tf2_ros、tf2_geometry_msgs、roscpp rospy std_msgs geometry_msgs1.发布方
时间戳:
now是当前时间,0.0是取最近时间
ros::Time::now()&ros::Time(0.0)
介绍一下例子的要求:
现有一机器人模型,核心构成包含主体与雷达,各对应一坐标系,
坐标系的原点分别位于主体与雷达的物理中心,已知雷达原点相对
于主体原点位移关系如下: x 0.2 y0.0 z0.5。当前雷达检测到一
障碍物,在雷达坐标系中障碍物的坐标为 (2.0 3.0 5.0),请问,
该障碍物相对于主体的坐标是多少?// 1.包含头文件
#include "ros/ros.h"
#include "tf2_ros/static_transform_broadcaster.h"
#include "geometry_msgs/TransformStamped.h"
#include "tf2/LinearMath/Quaternion.h"//欧拉角和四元数的转换
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"static_brocast");
// 3.创建静态坐标转换广播器
tf2_ros::StaticTransformBroadcaster broadcaster;
// 4.创建坐标系信息
geometry_msgs::TransformStamped ts;
//----设置头信息
ts.header.seq = 100;
ts.header.stamp = ros::Time::now();//时间为现在
ts.header.frame_id = "base_link";//父级坐标系,也就是基坐标系
//----设置子级坐标系
ts.child_frame_id = "laser";
//----设置子级相对于父级的偏移量
ts.transform.translation.x = 0.2;
ts.transform.translation.y = 0.0;
ts.transform.translation.z = 0.5;
//----设置四元数:将 欧拉角数据转换成四元数
tf2::Quaternion qtn;
qtn.setRPY(0,0,0);//翻滚角,俯仰角,偏航角
//转化为四元数
ts.transform.rotation.x = qtn.getX();
ts.transform.rotation.y = qtn.getY();
ts.transform.rotation.z = qtn.getZ();
ts.transform.rotation.w = qtn.getW();
// 5.广播器发布坐标系信息
broadcaster.sendTransform(ts);
ros::spin();
return 0;
}
2.订阅方
//1.包含头文件
#include "ros/ros.h"
#include "tf2_ros/transform_listener.h"
#include "tf2_ros/buffer.h"
#include "geometry_msgs/PointStamped.h"
#include "tf2_geometry_msgs/tf2_geometry_msgs.h" //注意: 调用 transform 必须包含该头文件
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"tf_sub");
ros::NodeHandle nh;
// 3.创建 TF 订阅节点
tf2_ros::Buffer buffer;
tf2_ros::TransformListener listener(buffer);
ros::Rate r(1);
while (ros::ok())
{
// 4.生成一个坐标点(相对于子级坐标系)
geometry_msgs::PointStamped point_laser;
point_laser.header.frame_id = "laser";
point_laser.header.stamp = ros::Time::now();
point_laser.point.x = 1;
point_laser.point.y = 2;
point_laser.point.z = 7.3;
// 5.转换坐标点(相对于父级坐标系)
//新建一个坐标点,用于接收转换结果
//--------------使用 try 语句或休眠,否则可能由于缓存接收延迟而导致坐标转换失败------------------------
try
{
geometry_msgs::PointStamped point_base;
point_base = buffer.transform(point_laser,"base_link");
ROS_INFO("转换后的数据:(%.2f,%.2f,%.2f),参考的坐标系是:",point_base.point.x,point_base.point.y,point_base.point.z,point_base.header.frame_id.c_str());
}
catch(const std::exception& e)
{
// std::cerr << e.what() << '\n';
ROS_INFO("程序异常.....");
}
r.sleep();
ros::spinOnce();
}
return 0;
}

八.参数服务的实现
1.参数的设置/增添
参数服务主要使用两套api(通过其中一个api就可以实现):
ros::NodeHandle
ros::param对于nodehandle:
创建一个节点句柄,比如是nh
就可以调用nh.setparam去设置参数
或者是调用ros内部的param
比如ros::param::set去设置参数
在命令行输入rosparam list可以验证是否增加参数成功
想获得具体参数值,可以继续在命令行输入rosparam get 路径(这里路径参考通过list列举出来的路径)
如果是需要修改参数,可以在后面重复以上操作,注意名字要一致,这里可以理解成重置
示例代码:
#include "ros/ros.h"
int main(int argc, char *argv[])
{
ros::init(argc,argv,"can");
ros::NodeHandle nh;
nh.setParam("type","xioahuang");
nh.setParam("rad",0.15);
ros::param::set("ty_pa","dalao");
ros::param::set("ra_pa",0.15);
nh.setParam("rad",88);
ros::param::set("ra_pa",66);
/* code */
return 0;
}2.参数的查阅
常用查阅函数:
参数服务器操作之查询_C++实现:
在 roscpp 中提供了两套 API 实现参数操作
ros::NodeHandle
param(键,默认值)
存在,返回对应结果,否则返回默认值
getParam(键,存储结果的变量)
存在,返回 true,且将值赋值给参数2
若果键不存在,那么返回值为 false,且不为参数2赋值
getParamCached键,存储结果的变量)--性能上有提升,更快
存在,返回 true,且将值赋值给参数2
若果键不存在,那么返回值为 false,且不为参数2赋值
getParamNames(std::vector<std::string>)
获取所有的键,并存储在参数 vector 中
hasParam(键)
是否包含某个键,存在返回 true,否则返回 false
searchParam(参数1,参数2)
搜索键,参数1是被搜索的键,参数2存储搜索结果的变量
ros::param ----- 与 NodeHandle 类似删除键:
/*
参数服务器操作之删除_C++实现:
ros::NodeHandle
deleteParam("键")
根据键删除参数,删除成功,返回 true,否则(参数不存在),返回 false
ros::param
del("键")
根据键删除参数,删除成功,返回 true,否则(参数不存在),返回 false
*/














 227
227











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









