






今天继续来看2022年ROS开发者大会中有关仿真的部分:Nvidia和Gazebo带来的合作项目gz-omni。
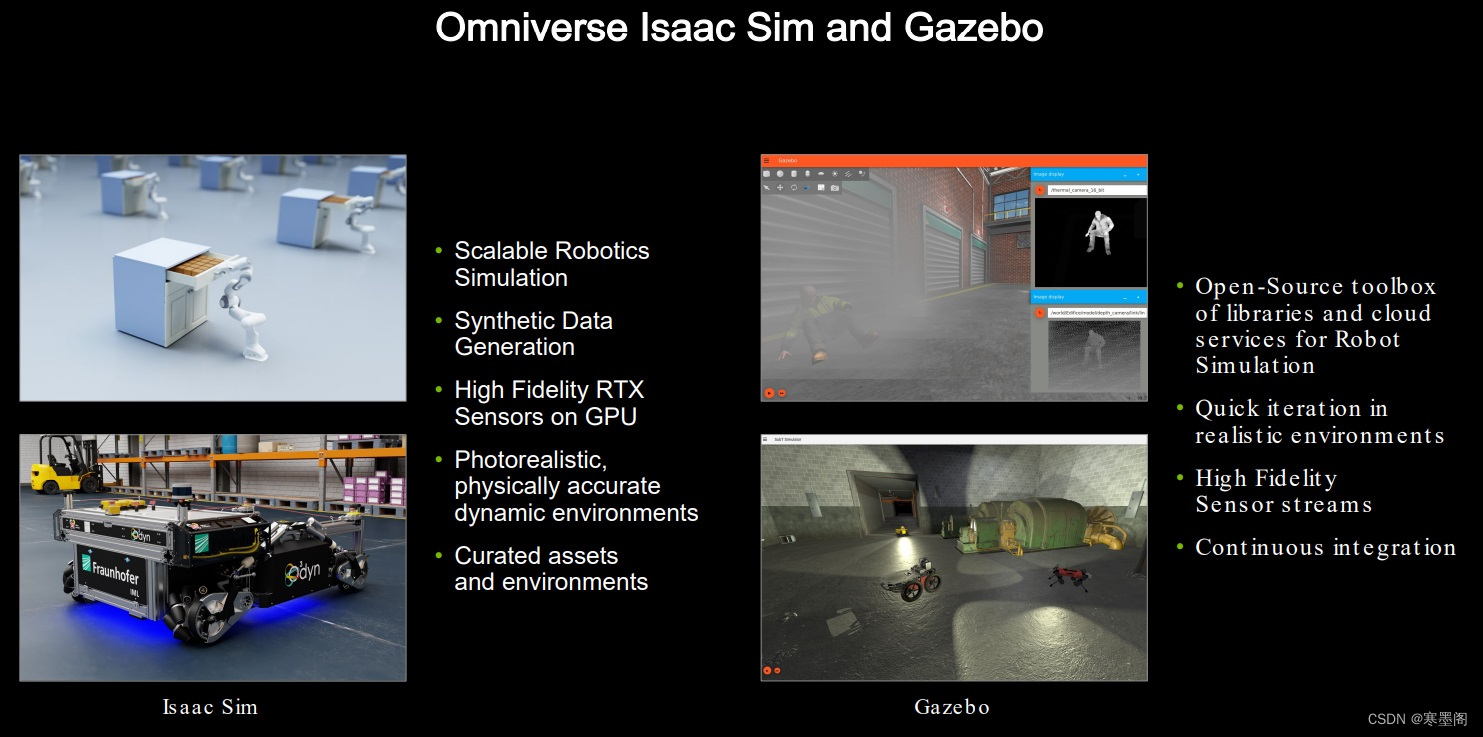
Isaac是Nvidia旗下的机器人仿真平台,属于其强大的Omniverse的一部分。Gazebo是Open Robotcis组织开发的和ROS绑定在一起的开源仿真平台。
简单来说,该项目实现了Nvidia Isaac Sim和Gazebo的联合仿真,通过gz-omni作为桥梁,同时运行Isaac和Gazebo,根据需求让不同的仿真软件完成不同的工作,例如让gazebo负责物理解算,Isaac负责传感器仿真。这样两个软件的联合仿真弥补了各自的短板,例如让Isaac负责传感器仿真,就可以充分利用现代显卡的渲染能力实现高保真的传感器数据输出,毕竟Gazebo的ogre渲染引擎还是太初级了。
此外该项目还实现了Gazebo平台的数据格式SDF和Isaac平台数据格式USD之间的互相转化,以便完成联合仿真。
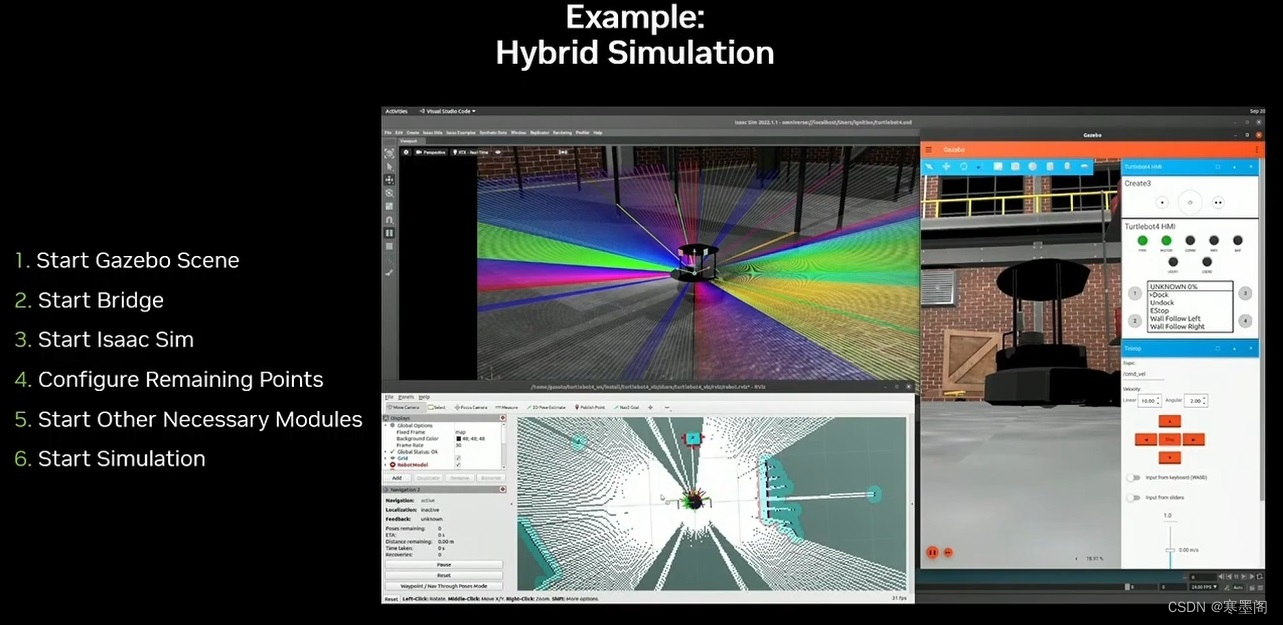
图2是他们展示的ros经典的turtlebot实例的截图(没错又是turtlebot!),右侧图中的三个窗口就分别是同时运行的Isaac、Gazebo和Rviz显示窗口。他们的开源成果可以在github上搜索gz-omni找到。
最后,本次开发者大会中其他有关仿真的talk还有ROS 2 and Gazebo Integration Best Practices,一个每次大会都会有的ROS官方介绍Gazebo应用的talk,和Marine Simulation - From Reality to Gazebo and Back Again,介绍水下仿真应用的talk。


















 3715
3715

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











