










GitHub - unitreerobotics/unitree_ros
基于unitree官方ws, 创建一个empty.world。启动Gazebo:
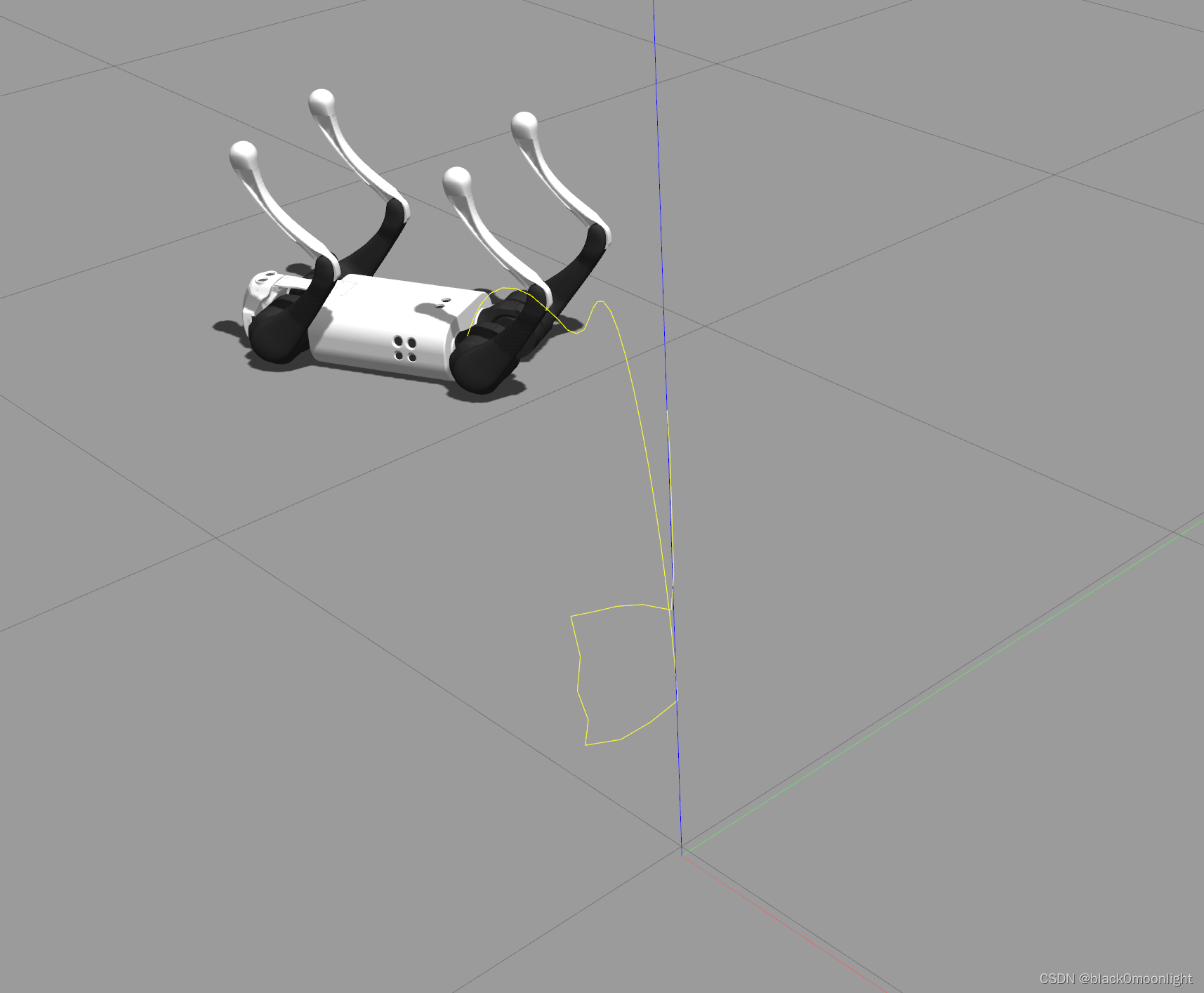
roslaunch unitree_gazebo normal.launch rname:=go1 wname:=empty在Isaac gym项目文件下创建一个ws,将unitree_controller中的cpp文件转译为python文件,编译后即可正常运行。
python ./ros_utils/src/scripts/unitree_servo.py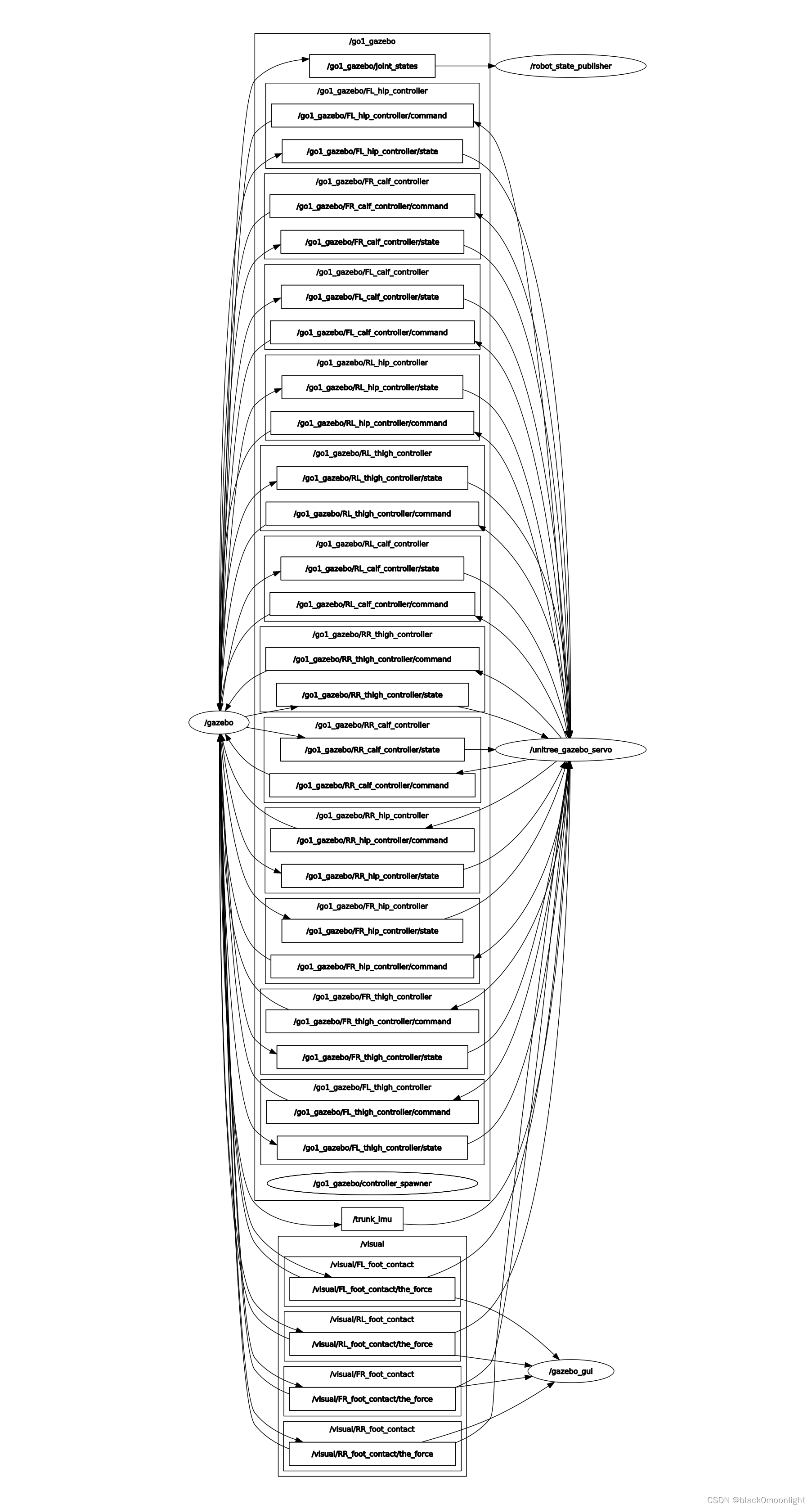
同时,也可以使用redis完成通信。
conda install redis-py














 2211
2211











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









