







 本文介绍了3D激光SLAM技术,如LOAM和V-LOAM方案,强调了视觉与激光雷达的融合在提高定位精度和鲁棒性方面的优势。ZhangJ等人提出的V-LOAM在KITTI数据集上表现出色,尤其在高速运动和光照变化条件下。未来发展趋势是多传感器融合,以应对复杂环境和提升SLAM算法的性能。
本文介绍了3D激光SLAM技术,如LOAM和V-LOAM方案,强调了视觉与激光雷达的融合在提高定位精度和鲁棒性方面的优势。ZhangJ等人提出的V-LOAM在KITTI数据集上表现出色,尤其在高速运动和光照变化条件下。未来发展趋势是多传感器融合,以应对复杂环境和提升SLAM算法的性能。

目录
1. 3D激光SLAM简介
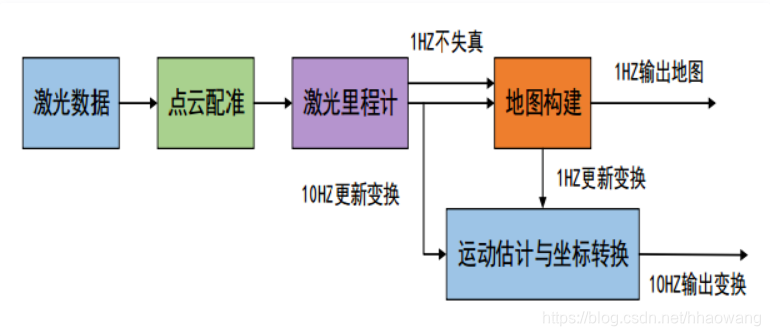
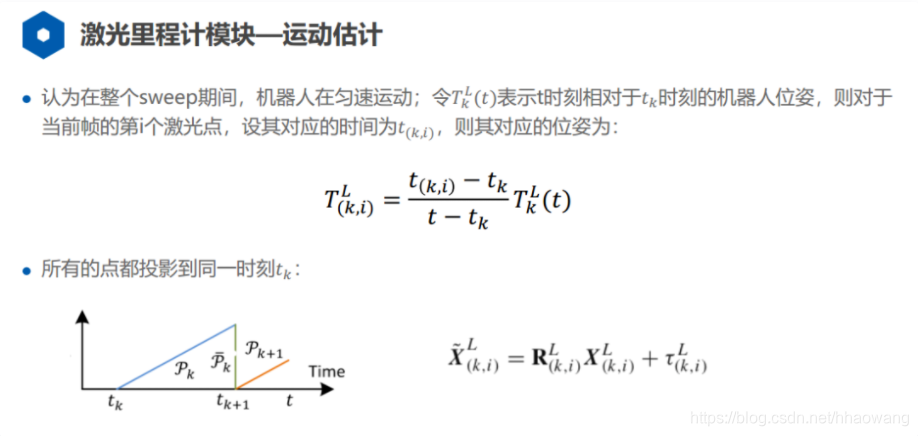
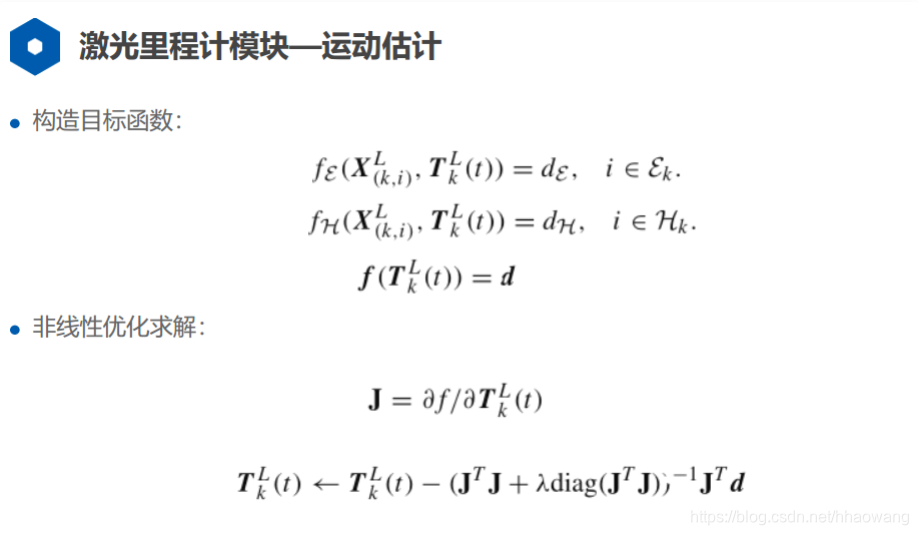
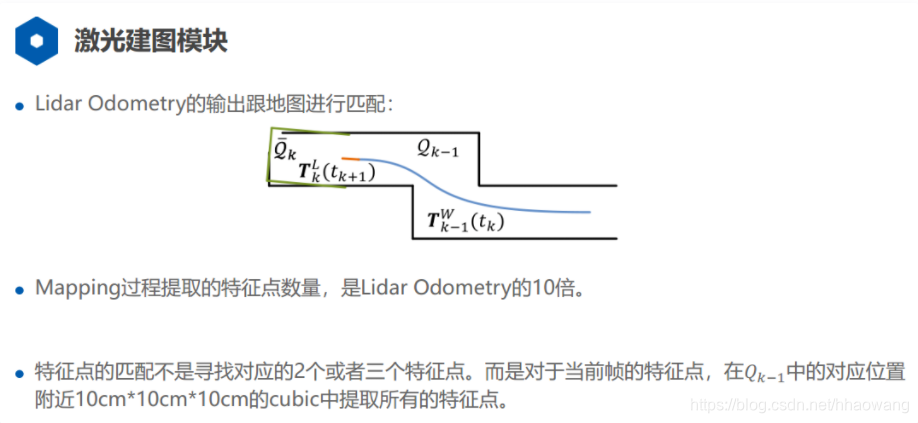
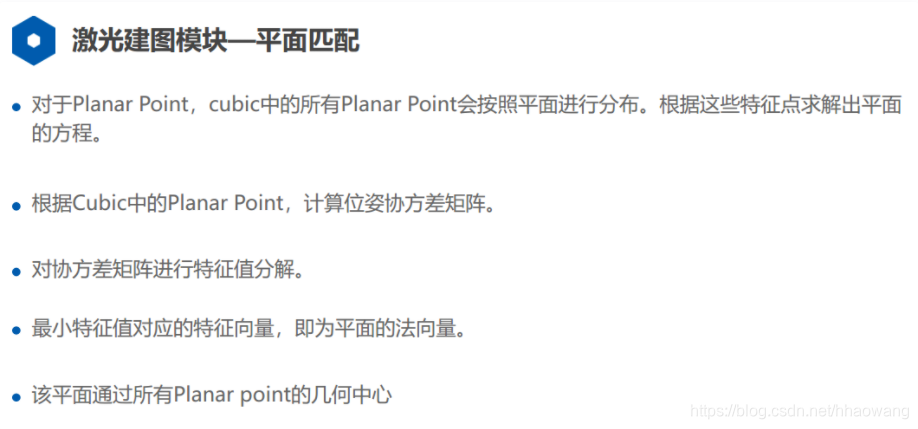
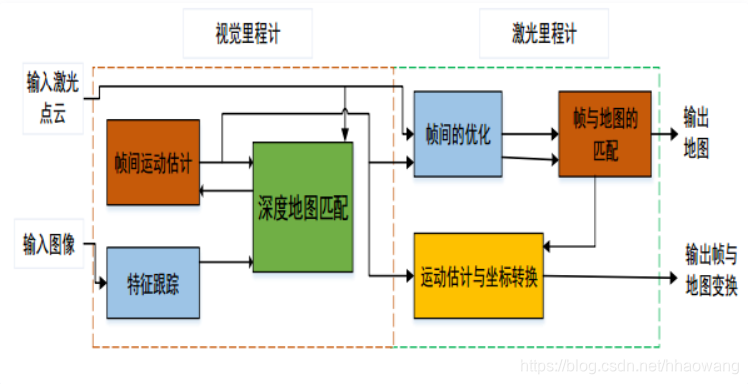
在 3D 激光 SLAM 领域中, 由 Zhang J 等人提出的LOAM 方案,利用 3D 激光雷达采集数据, 进行基于特征点的扫描匹配, 利用非线性优化方法进行运动估计, 激光里程计的输出与地图进行匹配, 包括直线匹配和平面匹配, 无回环检测模块,点面特征还不够可靠。
2. 3D激光雷达SLAM
3. 高精度V-LOAM方案
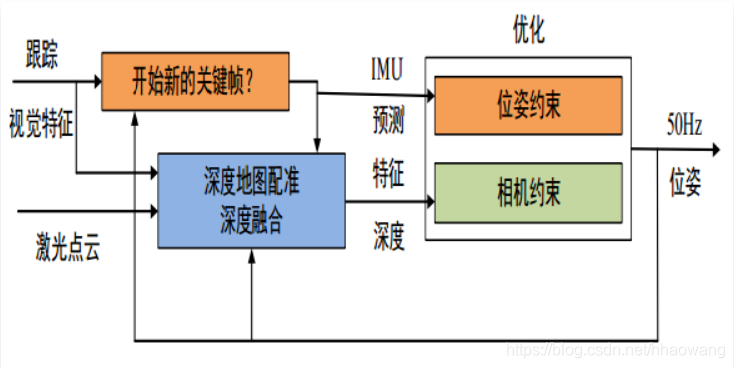
为了进一步改进 LOAM 方案的, Zhang J 等人提出视觉结合 3D 激光雷达实时建图的 V-LOAM 方案。利用视觉里程计以高频率估计位姿变换,激光里程计以低频率优化运动估计,并校准漂移。在公开的 KITTI 数据集上,V-LOAM 算法精度排名第一, 而且当传感器高速运动并受到明显的光照变化时,该方法的鲁棒性较好。
Zhang J 等人提出了一种用于自我运动估计和建图的数据处理方案 LVIO。该方案连接 3D 激光扫描仪, 相机和 IMU,顺序多层运行三个模块以产生实时自我运动估计。粗到精数据处理产生高速率估计并在长距离中构建低漂移的地图。
4 发展趋势
几种激光SLAM算法对比:
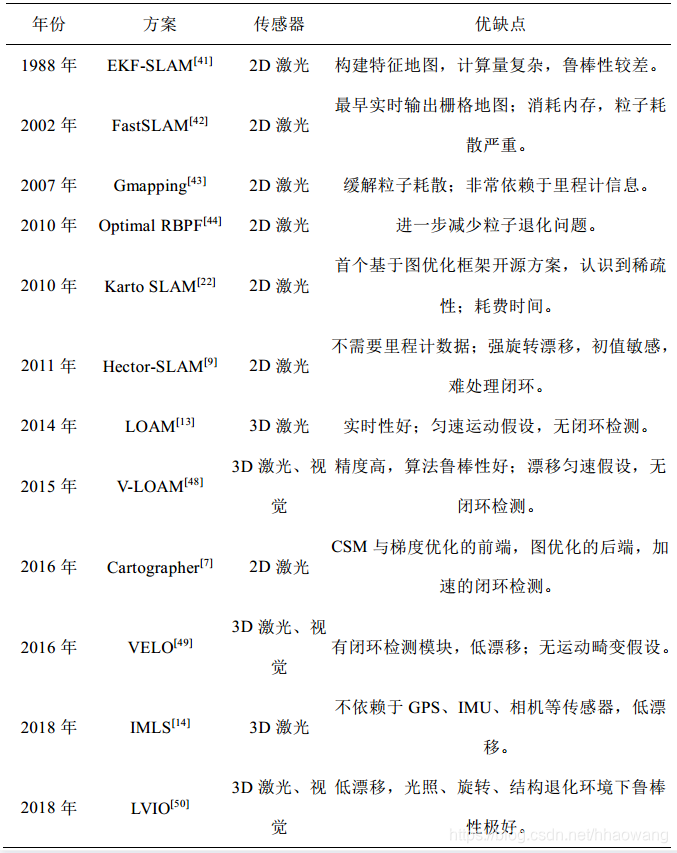
面对复杂的周围环境,多传感器融合的SLAM是必然趋势。视觉会提供高精度的里程计以及信息量丰富的地图信息,激光雷达为视觉特征提供准确的深度信息。SLAM算法的鲁棒性与实时性有待进一步提高。在提高SLAM算法鲁棒性方面,需要考虑里程计的标定、激光雷达的外参与时间戳标定、激光雷达运动畸变的去除等数据处理过程,同时针对退化环境、全局定位、动态环境定位等问题还有待完善。


















 2237
2237

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











