







一、Scan-to-Scan
1、格地图或者说是概率占据栅格地图初步
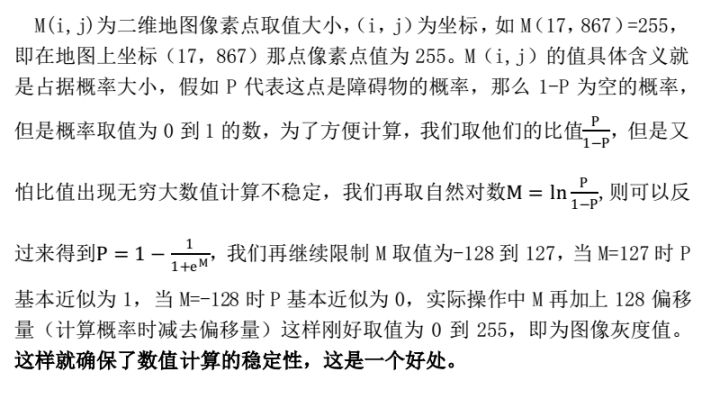
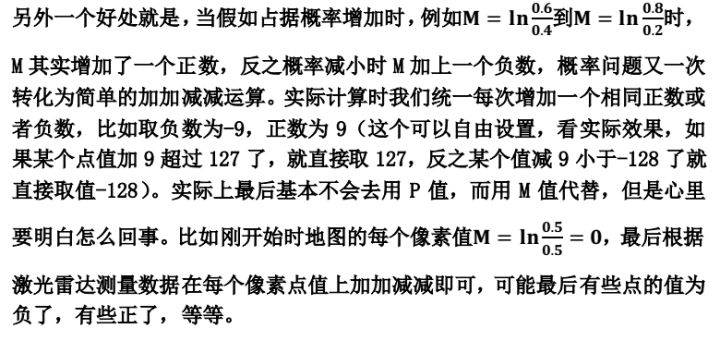
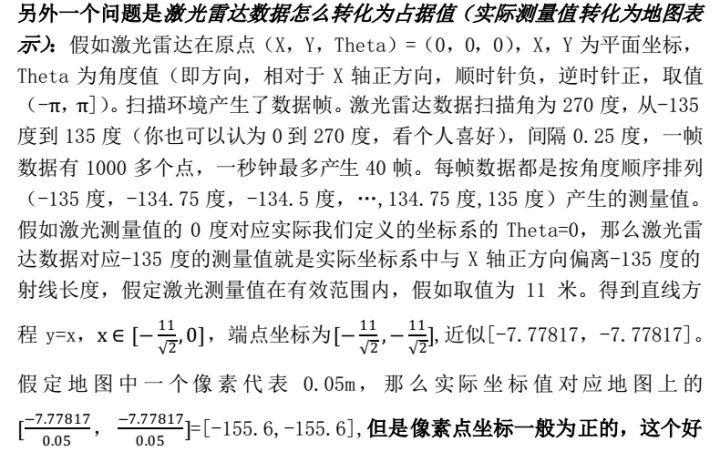
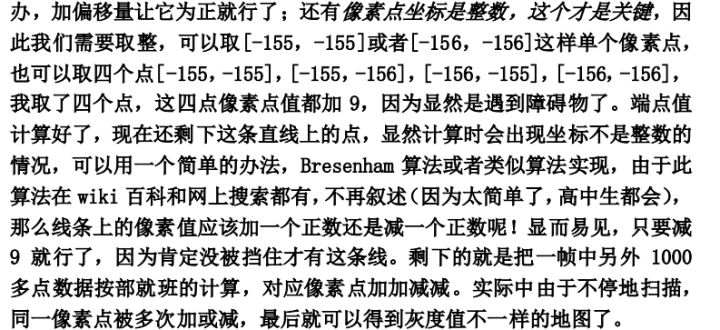
在Matlab中创建一个1000*1000大小的二维数组,如果数组中每个元素取值为0到255的整数(灰度图),再把这个数组用Matlab中的图片转换函数把数组转化为BMP图片(也可以其它你自己觉得合适的格式),这样我们就手动构建了一张地图了。直接用Windows自带的画图软件打开,可以在图上自己手动修改,这样就是手动地图修改,保存后在用Matlab读取这张BMP图片,转换为1000*1000的二维数组,这样就是地图的读取。说明:你也可以生成500*500,或者10000*10000大小,根据实际需求设置。图片中每个像素点代表一个单位距离,假如一个像素点代表0.05m,那么1000*1000大小的图片代表50m*50m大小的地图,以此类推,一个像素点也可以代表1m单位距离(距离分辨率小了)或者0.01m单位距离(距离分辨率大了)。在灰度图中0值为黑色,255为白色,可以假定0值为障碍物和255值为空(也可以反过来,随自己喜好),其它值代表这个位置是障碍物的概率或者是空的概率的大小,比如128代表既不是空也不是障碍物或者说两者的情形概率相等,比如200代表是空的概率大点,比如50代表是障碍物的概率大点。
下图为全是0值的1000*1000像素大小的地图,这里假定0值为空。
下图为自己随意画的几条线代表障碍物,假定255白色为障碍物
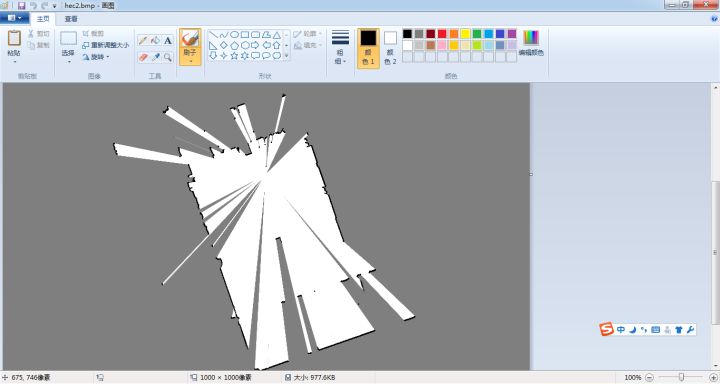
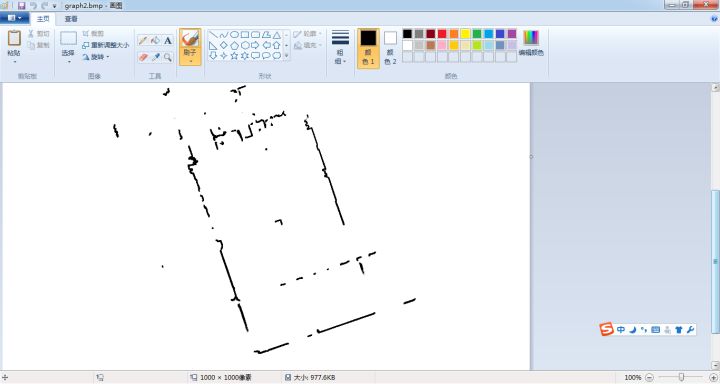
下两幅图为实际利用激光雷达SLAM方法生成一个大的房间的地图,两幅地图本质一样,只是表达方式取值不一样,第二幅只显示了障碍物和空地(没探索到的地方也表示空了)
对栅格地图的进一步说明
栅格地图理论可以从 概率机器人这本书中或者网上很方便的搜索到,我这边在仔细说明一下,以我自己实际应用的方式班门弄斧。
二、Scan to map
1、Scan to map ,即激光雷达扫描数据直接与地图进行匹配,得到实际位置坐标[x,y,theta]。这种方式一边计算位置,一边把新扫描到的数据及时加入到先前地图中。我这边主要参考论文:A Flexible and Scalable SLAM System with Full 3D Motion Estimation。这里我关心的只是二维激光雷达数据定位和建图,文献中的3D姿态估计等不涉及,只关心二维的。其实这篇文献就是Hector的理论基础。Google的Cartographer中前半部分submap建立就是用的这个方法,唯一区别就是原文献的双线性插值变成了Google的双三次插值,这么做应该是让数据更加smooth,插值方式可以随自己喜好,也可以选用其它数值计算相关书籍中的方法,这个主要是为了让数值计算更加稳定,避免出现计算崩溃,数据越smooth,计算可靠性越好。本篇讲诉比较简短,因为实现太简单了,编程很容易实现,这个前提是你要掌握非线性优化理论相关知识,因为文献中用了高斯牛顿迭代法求解。这里又出现了优化迭代方法,我在第二篇中也提出了一种高斯牛顿法简化原文献的计算思路。
2、第二篇中的Scan to scan 主要用于精确的相对位置求解,那么scan to map用来做什么呢。因为Scan to map 对于地图表示要求较高,一旦地图建错,后面将越来越错,就算地图不建错,它也是有误差在的。但是假如一张精确的地图已知,我们可以用Scan to map 给个大致定位,这个才是主要目标。而且它的定位计算量较小,因此在车速较高时也是可以达到实时的。下图就是我在十几米长宽的房间实现的一张小地图,一边Scan to map,一边把新的激光雷达数据加入地图中。地图50m*50m。
在SLAM中相关方法没有太大的区别,而且Scan to map 在slam中不是特别有主导地位,比如说用来建图还是有误差,后端还是主要图优化来建图;它主要还是在前端作用,用来即时定位,这就是它的存在吧,因为计算量还是比较小的相比Scan to Scan。以后开始我要着重讲诉图优化原理方法,把图优化理论用到激光雷达slam中可以说是激光雷达slam到了成熟期,理论上基本已经可以不需要再去研究了,最多只是计算效率怎么提升下,因为它把地图误差消除处理的非常好,回环误差或者闭环误差在图优化理论下根本无处可躲。现在主流slam都转向了视觉,更是由于神经网络,深度学习等等这几年的再一次火热,视觉slam成为了最新研究热点,我目前不会讲诉相关视觉slam,主要还是以激光雷达为主















 240
240











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









