







文纯属转载,并认真学习一遍,感谢大佬分享!
本文章配套源代码地址:https://github.com/Little-Potato-1990/localization_in_auto_driving
测试数据:https://pan.baidu.com/s/1TyXbifoTHubu3zt4jZ90Wg提取码: n9ys
本篇文章对应的代码Tag为 7.0
代码在后续可能会有调整,如和文章有出入,以实际代码为准
==================================================================================================
一、概述
由于我们的整体思路是逐渐改进来完成这个系列文章,所以每一步改进之后,实现了怎样的效果,提升了多少,是要有一个比较的,也就是这里的里程计精度评价。
我们没必要自己写精度评价算法,有开源的 评价方法evo 可以使用,我们只需要把对应的gnss数据和里程计数据存储下来,在运行完之后使用evo进行数据处理就可以了。
所以本片文章的内容并不多。
二、实现方法
一共分两步:存数据 和 评价
我们在发布里程计的函数PublishData前面再加一个函数 SaveTrajectory 去存储数据就好。自然需要的就是创建文件夹、创建txt文件、往文件里写数据了。
bool FrontEndFlow::SaveTrajectory() {
static std::ofstream ground_truth, laser_odom;
static bool is_file_created = false;
if (!is_file_created) {
if (!FileManager::CreateDirectory(WORK_SPACE_PATH + "/slam_data/trajectory"))
return false;
if (!FileManager::CreateFile(ground_truth, WORK_SPACE_PATH + "/slam_data/trajectory/ground_truth.txt"))
return false;
if (!FileManager::CreateFile(laser_odom, WORK_SPACE_PATH + "/slam_data/trajectory/laser_odom.txt"))
return false;
is_file_created = true;
}
for (int i = 0; i < 3; ++i) {
for (int j = 0; j < 4; ++j) {
ground_truth << gnss_odometry_(i, j);
laser_odom << laser_odometry_(i, j);
if (i == 2 && j == 3) {
ground_truth << std::endl;
laser_odom << std::endl;
} else {
ground_truth << " ";
laser_odom << " ";
}
}
}
return true;
}由于创建文件夹和创建文件这类功能是通用功能,所以我们在工程目录tools文件夹下定义一个FileManager类,专门存放此类小功能。
其中此处两个功能对应的函数就分别是CreateDirectory和CreateFile。存数据就是往txt文件里写两个位姿矩阵。
2. EVO评价
1)安装EVO
可以直接pip安装
pip install evo --upgrade --no-binary evo
2)使用EVO评价数据
EVO评价数据有两种模式,对应的指令分别是 evo_rpe 和 evo_ape ,前者评价的是每段距离内的误差,后者评价的是绝对误差随路程的累计。
评价每段距离内的误差可以使用如下指令
evo_rpe kitti ground_truth.txt laser_odom.txt -r trans_part --delta 100 --plot --plot_mode xyz
其中 --delta 100 表示的是每隔100米统计一次误差,这样统计的其实就是误差的百分比,和kitti的odometry榜单中的距离误差指标就可以直接对应了。
执行指令之后会得到如下图形
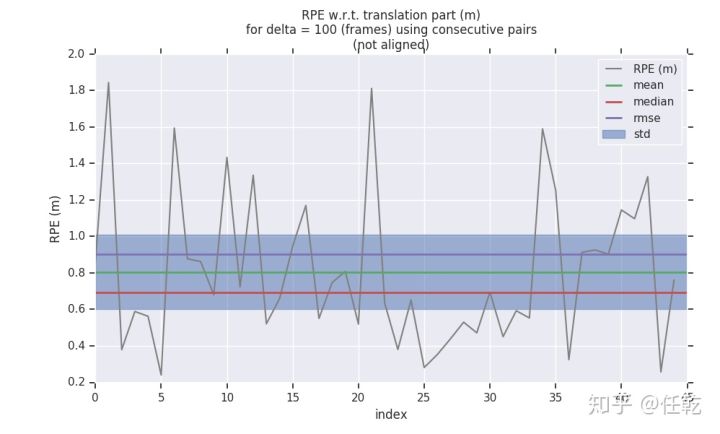
由于每隔100米计算一次,所以是离散的点连成的折线。具体的统计指标如下
最大误差: 1.843837 %
平均误差: 0.805469 %
最小误差: 0.240367 %
RMSE: 0.903959 %
评价总累计误差可以用如下指令
evo_ape kitti ground_truth.txt laser_odom.txt -r full --plot --plot_mode xyz
会得到这样的图形
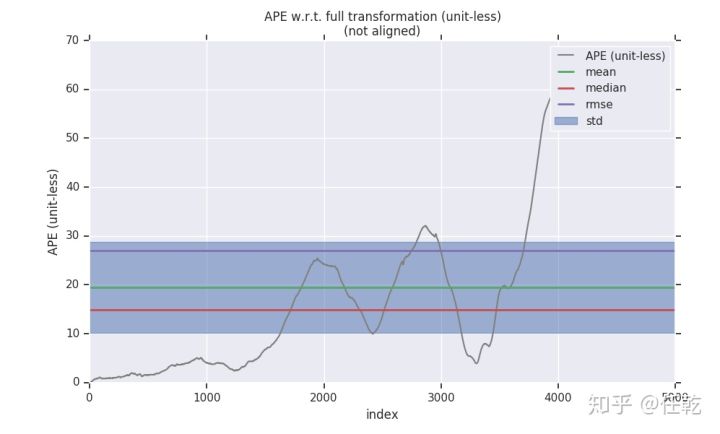
其中灰色部分就是累计误差,具体的指标如下
最大值:60.786025 m
平均值:19.478159 m
RMSE: 26.941895 m
编辑于 02-27















 1208
1208











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









