







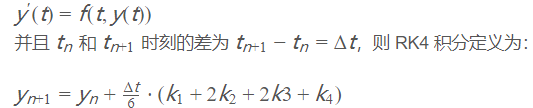
 本文介绍了微分方程的几种常见数值积分方法,包括欧拉法、中值法和四阶龙格-库塔法(RK4),并详细解释了它们的工作原理及适用场景。文中还提供了一个RK4积分法的应用实例。
本文介绍了微分方程的几种常见数值积分方法,包括欧拉法、中值法和四阶龙格-库塔法(RK4),并详细解释了它们的工作原理及适用场景。文中还提供了一个RK4积分法的应用实例。
1. 积分基本概念
设F(x)为函数f(x)的一个原函数,我们把函数f(x)的所有原函数F(x)+C(C为任意常数)叫做函数f(x)的不定积分(indefinite integral)。
非线性微分方程:
![]()
在有限的时间间隔Δt积分:

连续时间内积分:
工程上最常见的有三种:欧拉积分(Euler method)、中值积分(Midpoint method)和龙格-库塔法积分(Runge–Kutta methods)。他们的区别就是如何用数值方法模拟一个斜率。这里简单总结如下:
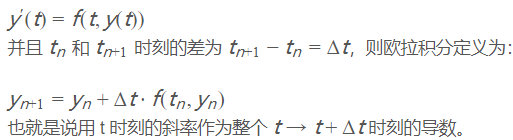
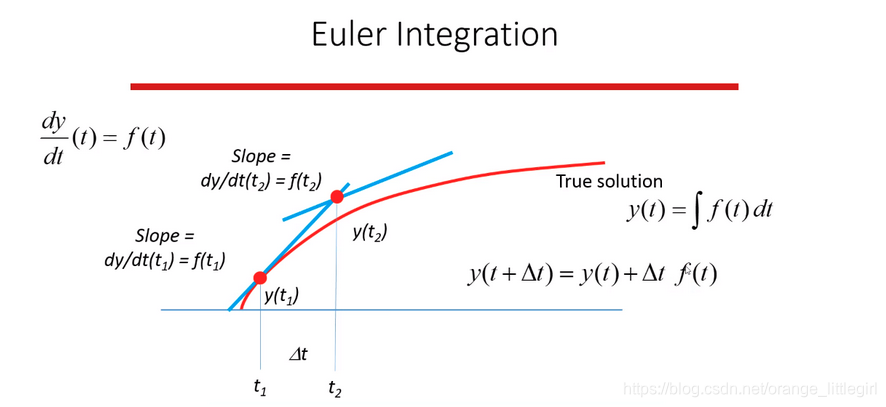
2. 欧拉积分
设有如下微分方程:
欧拉方法假设导数在区间内是恒定的,作为一般的RK方法,这对应于单阶段方法,计算初始点的导数,并用它来计算终点的积分值
3. 中值积分
中值积分法假设导数是间隔中点的导数,并进行一次迭代来计算此中点的fx值。
设有如下微分方程:

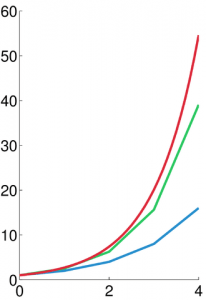
欧拉积分与中值积分都是一阶近似并没有本质不同,二者只是一阶导数所取位置不同,他们的性能也有差别,如下图所示,作为一阶积分近似方法来讲,中点积分有时会稍好一些(带来更快的收敛速度)。
![]()
4.RK4积分(4阶龙格库塔法)
龙格-库塔法(Runge-Kutta methods)是用于非线性常微分方程的解的重要的一类隐式或显式迭代法。在工程中最常用的是 四阶龙格-库塔积分,也就是 RK4 积分,它的计算方式如下:
设有如下微分方程:
其中:
k1 是时间段开始时的斜率;
k2 是时间段中点的斜率,通过欧拉法采用斜率k1来决定y在点tn + h/2的值;
k3 也是中点的斜率,但是这次采用斜率k2决定y值;
k4 是时间段终点的斜率,其y值用k3决定。
其数学公式如下:
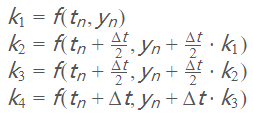
从公式中可以看出两个中点的斜率具有更大的权重。龙格-库塔法的示意图如下,它也是一种更高阶的逼近方法,通常也具有更好的逼近效果,总累计误差为 Δt4 阶。
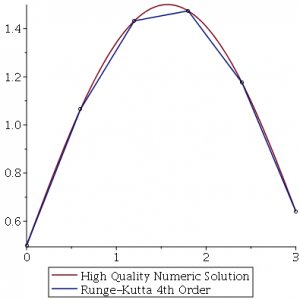
Runge-Kutta4假定评估值,对于 f()在间隔的开始,中点,中点的中点和结束。它使用四个阶段迭代计算积分,用四个导数k 1~k 4,顺序获得。然后对这些导数进行加权平均,以获得4阶估计值间隔中的导数。
RK4方法更好地指定为一个小算法而不是一步式公式。
龙格-库塔方法的推导基于Taylor展开方法,因而它要求所求的解具有较好的光滑性。如果解的光滑性差,那么,使用四阶龙格-库塔方法求得的数值解,其精度可能反而不如改进的欧拉方法。在实际计算时,应正对问题的具体特点选择适合的算法。对于光滑性不太好的解,最好采用低阶算法而将步长取小。
参考代码
#include "stdio.h"
#include "stdlib.h"
void RKT(t,y,n,h,k,z)
int n; /*微分方程组中方程的个数,也是未知函数的个数*/
int k; /*积分的步数(包括起始点这一步)*/
double t; /*积分的起始点t0*/
double h; /*积分的步长*/
double y[]; /*存放n个未知函数在起始点t处的函数值,返回时,其初值在二维数组z的第零列中*/
double z[]; /*二维数组,体积为n x k.返回k个积分点上的n个未知函数值*/
{
extern void Func(); /*声明要求解的微分方程组*/
int i,j,l;
double a[4],*b,*d;
b=malloc(n*sizeof(double)); /*分配存储空间*/
if(b == NULL)
{
printf("内存分配失败\n");
exit(1);
}
d=malloc(n*sizeof(double)); /*分配存储空间*/
if(d == NULL)
{
printf("内存分配失败\n");
exit(1);
}
/*后面应用RK4公式中用到的系数*/
a[0]=h/2.0;
a[1]=h/2.0;
a[2]=h;
a[3]=h;
for(i=0; i<=n-1; i++)
z[i*k]=y[i]; /*将初值赋给数组z的相应位置*/
for(l=1; l<=k-1; l++)
{
Func(y,d);
for (i=0; i<=n-1; i++)
b[i]=y[i];
for (j=0; j<=2; j++)
{
for (i=0; i<=n-1; i++)
{
y[i]=z[i*k+l-1]+a[j]*d[i];
b[i]=b[i]+a[j+1]*d[i]/3.0;
}
Func(y,d);
}
for(i=0; i<=n-1; i++)
y[i]=b[i]+h*d[i]/6.0;
for(i=0; i<=n-1; i++)
z[i*k+l]=y[i];
t=t+h;
}
free(b); /*释放存储空间*/
free(d); /*释放存储空间*/
return;
}
main()
{
int i,j;
double t,h,y[3],z[3][11];
y[0]=-1.0;
y[1]=0.0;
y[2]=1.0;
t=0.0;
h=0.01;
RKT(t,y,3,h,11,z);
printf("\n");
for (i=0; i<=10; i++) /*打印输出结果*/
{
t=i*h;
printf("t=%5.2f\t ",t);
for (j=0; j<=2; j++)
printf("y(%d)=%e ",j,z[j][i]);
printf("\n");
}
}
void Func(y,d)
double y[],d[];
{
d[0]=y[1]; /*y0'=y1*/
d[1]=-y[0]; /*y1'=y0*/
d[2]=-y[2]; /*y2'=y2*/
return;
}
参考文章附录A:四元数误差状态卡尔曼滤波
参考亮哥的博客说明:http://www.xinliang-zhong.vip/msckf_notes/


















 2891
2891

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











