







 本文介绍了 GNSS/INS 紧组合导航系统的故障检测与修复方法,重点讨论了RCTM和AIME算法。AIME方法包括基于检验统计量和新息协方差矩阵的故障检测,对阶跃和渐变故障有不同响应速度。文中还提及了代码实现,特别是故障修复/隔离算法,并预告将开源全部代码。
本文介绍了 GNSS/INS 紧组合导航系统的故障检测与修复方法,重点讨论了RCTM和AIME算法。AIME方法包括基于检验统计量和新息协方差矩阵的故障检测,对阶跃和渐变故障有不同响应速度。文中还提及了代码实现,特别是故障修复/隔离算法,并预告将开源全部代码。
//======================================================================//
GNSS/INS紧组合导航系统完好性监测(理论和c++代码)专栏,后续会开源全部代码
https://blog.csdn.net/hltt3838/category_12207970.html?spm=1001.2014.3001.5482
//======================================================================//
目录
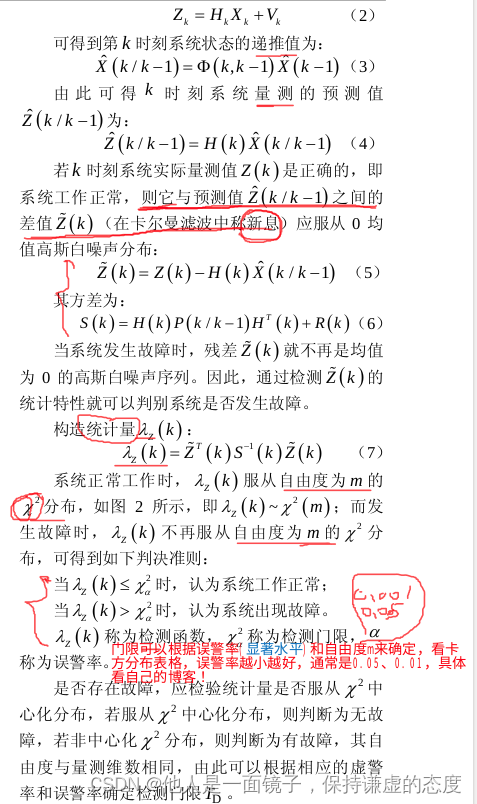
一、故障检测算法
备注:
- 理论部分还是比较容易理解的,代码实现也比较简单,见后续 !
- 该方法的优点是 对阶越故障相应快,渐变故障检测慢 !
- 对于初学者需要注意的是 卡方检验的相关概念和求法,比较详细的介绍博客参考下面的连接 !
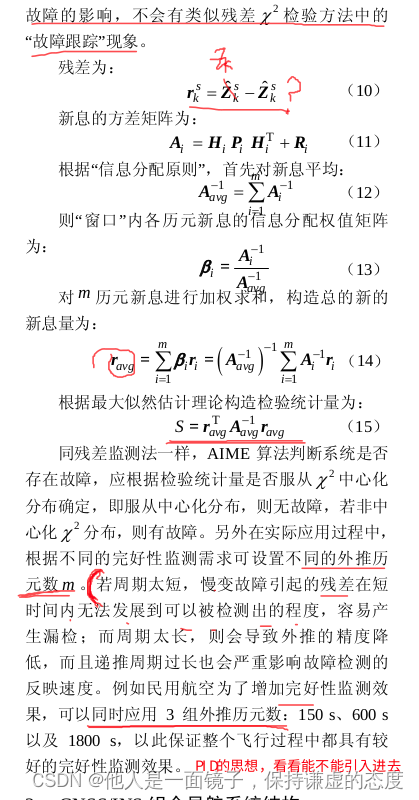
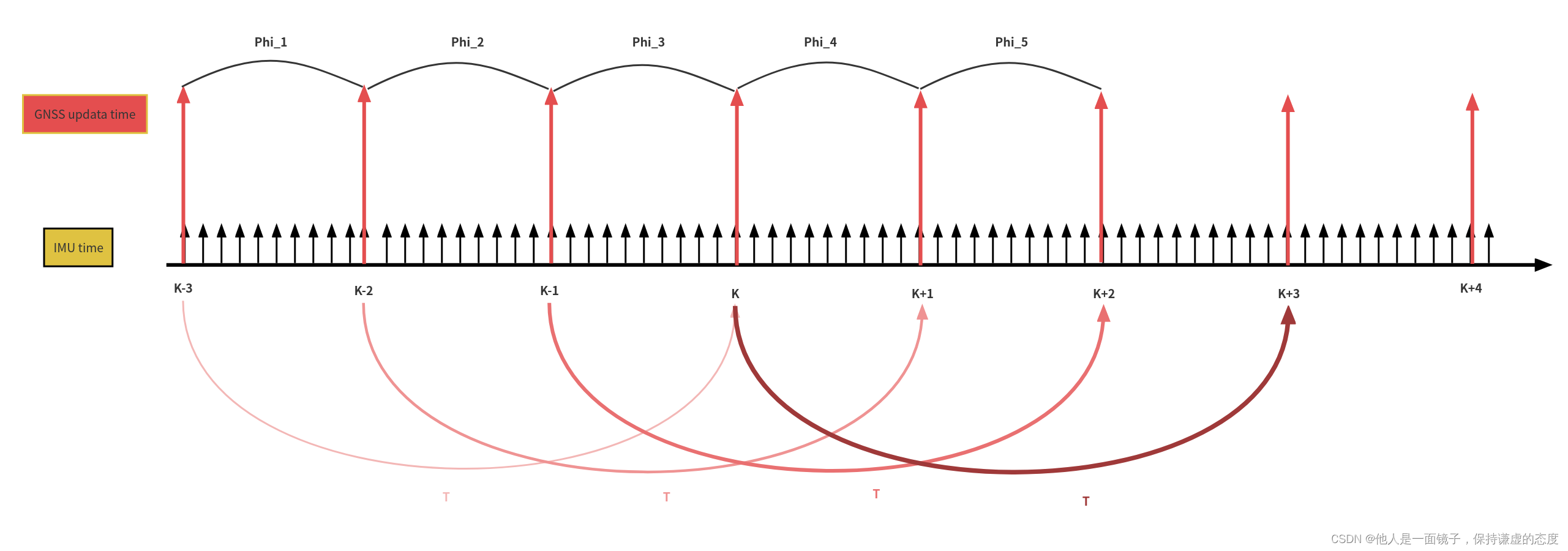
上述的AIME并非 原论文中的AIME方法,更像是改进。源论文方法如下:

备注:
- 理论部分理解相对复杂,代码实现稍微复杂,理论图如下
- 该方法的优点是 对渐变故障检测相对快 !
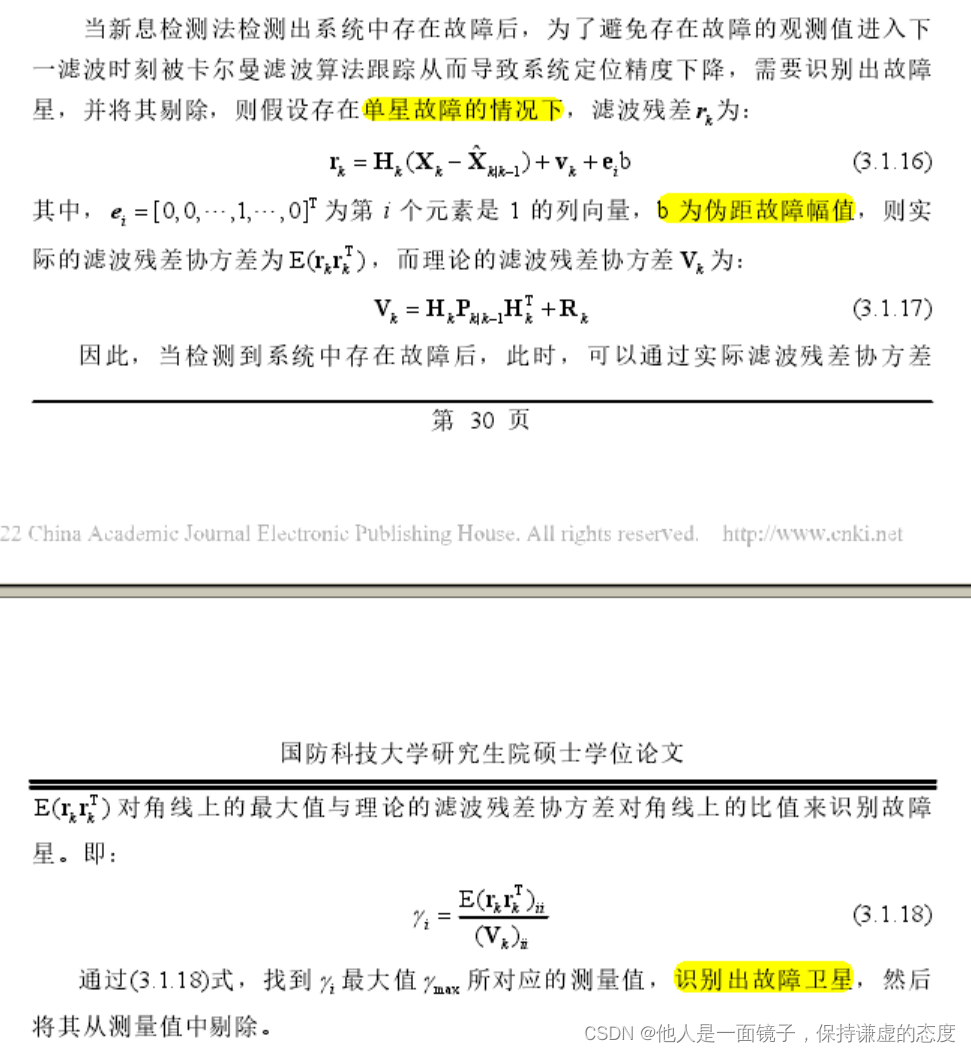
二、故障修复/隔离算法
2.1 基于检验统计量
参考论文:
INS/GNSS 松组合导航故障检测与修复算法(苗岳旺 1 , 孙付平 1 , 李海峰 1 , 李飞 2)
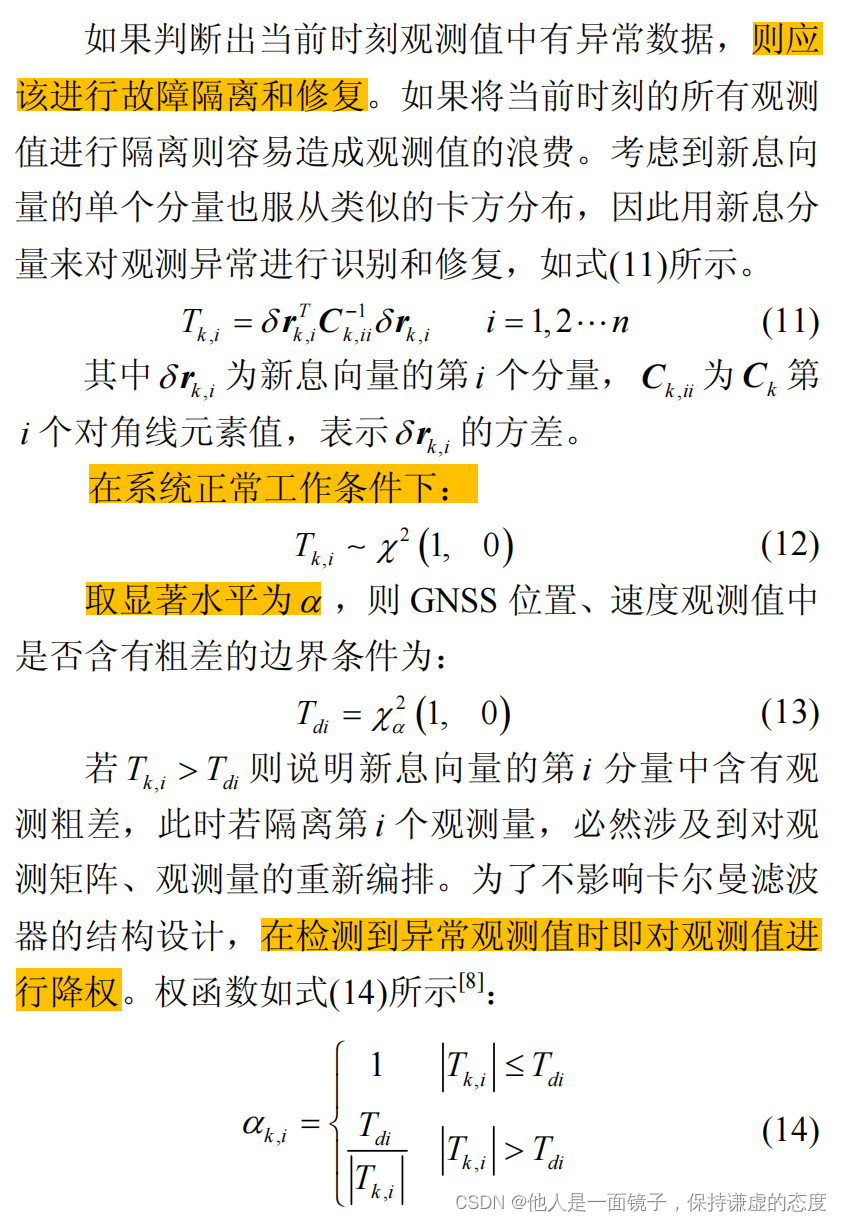
2.2 基于新息协方差矩阵
参考论文:
GNSS/INS 紧组合导航接收机自主完好性监测技术研究
三、代码部分
double TC_Filter::RCTM_test_statistic(Eigen::VectorXd &rk, Eigen::MatrixXd &Ak)
{
double Ts = 0;
Ts = rk.transpose() * Ak.inverse() * rk;
// std::cout<<"--------------------------- Ts_RCTM ="<<Ts<<std::endl;
return Ts;
}
double TC_Filter::AIME_test_statistic(Eigen::Matrix<double, NSTATE, 1> &mdx_, Eigen::Matrix<double, NSTATE, NSTATE> &m_Phi_, Eigen::MatrixXd &Hk_, Eigen::Matrix<double, NSTATE, NSTATE> &Pk_, Eigen::VectorXd &Zk_,Eigen::MatrixXd &Rk_)
{
double Ts = 0;
if( mdx_vec.size() < M_Td )
{
mdx_vec.push_back(mdx_);
m_Phi_vec.push_back(m_Phi_);
Hk_vec.push_back(Hk_);
Pk_vec.push_back(Pk_);
Zk_vec.push_back(Zk_);
Rk_vec.push_back(Rk_);
}
if( mdx_vec.size() >= M_Td )
{
Eigen::VectorXd Xks_, Zks_;
Eigen::VectorXd r_i;
Eigen::MatrixXd A_i,Aavg_inv;
Eigen::VectorXd beta_i, r_avg;
Xks_ = mdx_vec[0];
for(int i = 0; i< mdx_vec.size(); i++)
{
A_i.noalias() = Hk_vec[i] * Pk_vec[i] * Hk_vec[i].transpose() + Rk_vec[i];
Aavg_inv.setZero(A_i.rows(), A_i.cols());
Aavg_inv.noalias() += A_i.inverse();
}
for(int i = 0; i < mdx_vec.size(); i++)
{
for(int j = 0; j <= i; j++)
Xks_.noalias() = m_Phi_vec[j] * Xks_;
Zks_.noalias() = Hk_vec[i] * Xks_;
r_i = Zk_vec[i] - Zks_;
A_i.noalias() = Hk_vec[i] * Pk_vec[i] * Hk_vec[i].transpose() + Rk_vec[i];
beta_i.setZero(A_i.rows());
beta_i += A_i.inverse() * r_i;
}
r_avg.noalias() = Aavg_inv.inverse() * beta_i;
Ts = r_avg.transpose() * Aavg_inv * r_avg;
// delete the first
mdx_vec.erase(mdx_vec.begin());
m_Phi_vec.erase(m_Phi_vec.begin());
Hk_vec.erase(Hk_vec.begin());
Pk_vec.erase(Pk_vec.begin());
Zk_vec.erase(Zk_vec.begin());
Rk_vec.erase(Rk_vec.begin());
}
std::cout<<"--------------------------- mdx_vec.size() ="<<mdx_vec.size()<<std::endl;
return Ts;
}
// 原版 方法
void FUSION_KF::AIME_test_statistic( Eigen::VectorXd &Zk_p,Eigen::MatrixXd &Vk_p, double &Ts_AIME)
{
if( Zk_vec.size() < M_Td )
{
Zk_vec.push_back(Zk_p);
Vk_vec.push_back(Vk_p);
}
if( Zk_vec.size() >= M_Td )
{
Eigen::MatrixXd Vavg_inv, Vavg_inv_inv;
Eigen::VectorXd beta, r_avg;
// 1、为了解决不同时刻矩阵维度不一致问题
int max_rows,max_cols;
max_rows = 0; max_cols = 0;
for(int i = 0; i< Zk_vec.size(); i++)
{
if( Vk_vec[i].rows() > max_rows)
max_rows = Vk_vec[i].rows();
if( Vk_vec[i].cols() > max_cols)
max_cols = Vk_vec[i].cols();
}
std::cout <<"--max_rows - max_cols 1= \n"<<max_rows<<","<<max_cols<<std::endl;
// 2、求Vavg
Vavg_inv.setZero(max_rows,max_cols);
for(int i = 0; i< Zk_vec.size(); i++)
{
Eigen::MatrixXd Vi_inv,Vi_inv_mid;
Vi_inv_mid.setZero(max_rows,max_cols);
Vi_inv.setZero(Vk_vec[i].rows(), Vk_vec[i].cols());
Vi_inv = Vk_vec[i].inverse();
Vi_inv_mid.topLeftCorner(Vk_vec[i].rows(), Vk_vec[i].cols()) = Vi_inv;
Vavg_inv += Vi_inv_mid;
}
// 3、
beta.setZero(max_rows);
for(int i = 0; i < Zk_vec.size(); i++)
{
Eigen::VectorXd vkinv_rk,vkinv_rk_mid;
vkinv_rk_mid.setZero(max_rows);
vkinv_rk.noalias() = Vk_vec[i].inverse() * Zk_vec[i];
vkinv_rk_mid.head(vkinv_rk.rows()) = vkinv_rk;
beta += vkinv_rk_mid;
}
// 4、
r_avg.noalias() = Vavg_inv.inverse() * beta;
Ts_AIME = r_avg.transpose() * Vavg_inv * r_avg ;
Ts_AIME = sqrt(Ts_AIME);
if(abs(Ts_AIME) > 500.0)
Ts_AIME = 2.0;
std::cout <<"-----------------------Ts_AIME = \n"<<Ts_AIME<<std::endl;
// 4、delete the first
Zk_vec.erase(Zk_vec.begin());
Vk_vec.erase(Vk_vec.begin());
}
}
备注:
- M_Td 是设置的外推周期 !这个是可以根据不同的应用场景而改动 !
- 函数放在 组合导航系统EKF更新函数中,后续会开源全部代码 !
- 反是代码有问题,烦请指出,大家共同学习和进步,谢谢 !
抗差 代码(上述理论对应)
// =============== added by Jiang
double Td = 10.83;
Eigen::MatrixXd Ak,Ak_inv,MAX_mid;
MAX_mid.setIdentity( Rmat.rows(),Rmat.cols() );
Ak.noalias() = Hmat * covar_Th + Rmat;
Ak_inv = Ak.inverse();
for(int i = 0; i < Rmat.rows(); i++)
{
double Tsi = 0.0;
Tsi = Zmat[i] * Ak_inv(i,i) * Zmat[i];
if( Tsi > Td)
{
MAX_mid(i,i) = Td / Tsi;
std::cout<<"---------------Tsi= \n"<<Tsi<<std::endl;
}
else
MAX_mid(i,i) = 1.0;
}三、题外话
我们在调试代码的时候可能会遇到一个奇怪的问题,组合导航结果在某一时间段 出现很大的定位误差,但是抗差对其无用。
正常人的思维方式都司卫星观测值不好,其实还会有一种情况,那便是IMU的参数不对 !很多人都会忽略IMU问题,但是确实存在相应参数不准确的情况,遇到改问题,分两步处理!
- 单点定位 看看GNSS的定位结果,若发现无异常,则是IMU问题;
- IMU参数 调大即可 (一般把零偏不确定性设为之前的五倍左右)


















 1078
1078

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











