







什么是Nodelet&为什么要用Nodelet
Nodelet旨在提供一种方法,在一台机器上、在一个进程中运行多个算法,在进程内传递消息时不会产生拷贝成本。
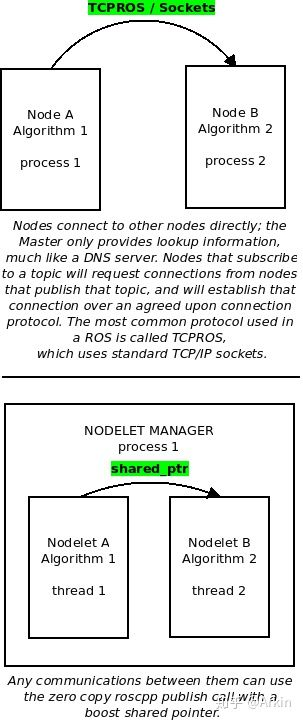
普通节点使用TCP。这对很多事情来说都很好用。但是,如果你有多个进程需要使用包含大量数据的消息(如图像或点云),打包消息,发送消息,然后解包,可能需要一点时间。如果两个进程在同一台计算机上,那么只需发送一个指向该数据的指针,而不是通过TCP发送数据本身,这样会更快。
但这只适用于同一台计算机上的进程(又称nodelet),因为一台计算机的指针对另一台计算机没有意义。另一方面,节点可以在联网的计算机上工作,因为你要发送实际的数据。
因此,nodelet不会使进程更快,但它是一种从一个进程到另一个进程获取信息的更快方式。一个好的经验法则是总是使用节点(因为它们更容易使用,而且更灵活),除非你遇到消息传递对你的应用程序来说太慢并导致问题的情况,那么你会考虑使用nodelets。
如何使用
Nodelet package 提供:
- 基类nodelet::Nodelet,用于实现nodelet;所有的nodelet都继承自这个基类,并且是动态可加载的(使用pluginlib)。
- NodeletLoader类,用于实例化nodelet; 提供命名空间、重映射参数等;
- 还有一个nodelet_manager进程,可以加载一个或多个nodelet。利用boost共享指针可以实现他们之间通信的零拷贝。
命令行api:
nodelet manager - Launch a nodelet manager node
nodelet load pkg/Type manager - Launch a nodelet of type pkg/Type on manager manager
nodelet standalone pkg/Type - Launch a nodelet of type pkg/Type in a standalone node
nodelet unload name manager - Unload a nodelet a nodelet by name from manager
举例:
roscore
rosrun nodelet nodelet manager __name:=nodelet_manager
rosrun nodelet nodelet load nodelet_tutorial_math/Plus nodelet_manager __name:=nodelet1 nodelet1/in:=foo _value:=1.1
注意:rosrun命令中可以显式设置节点的名称,语法为:rosrun package-name executable-name __name:=node-name,这种方法将使用node-name参数给出的名称覆盖节点的默认名。
此时运行rosnode list将会看到:
/nodelet1
/nodelet_manager
通过launch文件启动:
<launch>
<node pkg="nodelet" type="nodelet" name="standalone_nodelet" args="manager" output="screen"/>
<node pkg="nodelet" type="nodelet" name="SampleNodelet" args="load example_pkg/SampleNodelet standalone_nodelet" output="screen">
</node>
</launch>
该launch打开两个nodelet, 更改第二个nodelet的name和args.
一个例子
nodelet和node很大程度上保持一致, 对外来说, nodelet几乎可以视为node, nodelet之间仍然是消息传输(只是内部实现由原始数据的传输改成了指针传输), 将node转换为nodelet只需要少量的改动.
nodelet的pkg组织架构和node有点相似, 包括: include, src, package.xml, CMakeLists.txt, 和 nodelet_plugins.xml.
step1: 创建pkg: catkin_create_pkg sample_nodelet nodelet roscpp rospy. 注意要依赖nodelet包.
**step2:**在include, src中创建一个类, 该类继承nodelet::Nodelet, 最好在类的外面加一个namespace, 可以以package名字做namespace. 类中有一个onInit()函数, 相当于main()函数.
//sample_nodelet.h
#ifndef __SAMPLE_NODELET_H__
#define __SAMPLE_NODELET_H__
#include <nodelet/nodelet.h>
namespace example_pkg
{
class SampleNodelet: public nodelet::Nodelet
{
public:
virtual void onInit();
};
}
#endif //__SAMPLE_NODELET_H__
**step3:**在cpp中实现onInit()函数, 编写自己的代码.
有个特别的地方是 cpp中还需要加一行
PLUGINLIB_EXPORT_CLASS(example_pkg::SampleNodelet, nodelet::Nodelet)
//sample_nodelet.cpp
#include <pluginlib/class_list_macros.h>
#include <ros/ros.h>
#include <sample_nodelet.h>
PLUGINLIB_EXPORT_CLASS(example_pkg::SampleNodelet, nodelet::Nodelet)
namespace example_pkg
{
void SampleNodelet::onInit()
{
NODELET_DEBUG("Initializing nodelet...");
ROS_INFO("Nodelet is Ok for test!!");
}
step4: CMakelist中添加library. 这里我们发现, nodelet的pkg中没有main()没有可执行程序, 而是生成一个lib, 让ros调用.
# CMakeLists.txt
cmake_minimum_required(VERSION 2.8.3)
project(sample_nodelet)
find_package(catkin REQUIRED COMPONENTS
nodelet
roscpp
rospy
)
catkin_package(
INCLUDE_DIRS include
LIBRARIES ${PROJECT_NAME}
CATKIN_DEPENDS nodelet roscpp rospy
# DEPENDS system_lib
)
include_directories(
include
${catkin_INCLUDE_DIRS}
)
add_library(${PROJECT_NAME} src/sample_nodelet.cpp)
add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
step5: nodelet_plugins.xml是nodelet特有的, 文件名可以自己定, 最好用这个名字. xml文件里面指定nodelet的lib的路径, 以及nodelet类的名字.
<library path="lib/libsample_nodelet">
<class name="example_pkg/SampleNodelet" type="example_pkg::SampleNodelet" base_class_type="nodelet::Nodelet">
<description>
This is my nodelet.
</description>
</class>
</library>
step6: package.xml中增加export项, 把上一个xml文件的位置配置进去.
<?xml version="1.0"?>
<package>
<name>sample_nodelet</name>
<version>0.0.0</version>
<description>The sample_nodelet package</description>
<maintainer email="symao@todo.todo">symao</maintainer>
<license>TODO</license>
<buildtool_depend>catkin</buildtool_depend>
<build_depend>nodelet</build_depend>
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<run_depend>nodelet</run_depend>
<run_depend>roscpp</run_depend>
<run_depend>rospy</run_depend>
<!-- The export tag contains other, unspecified, tags -->
<export>
<nodelet plugin="${prefix}/nodelet_plugins.xml" />
</export>
</package>
至此, nodelet pkg的编写就基本完成. 可以用catkin_make直接编译














 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









