







问题
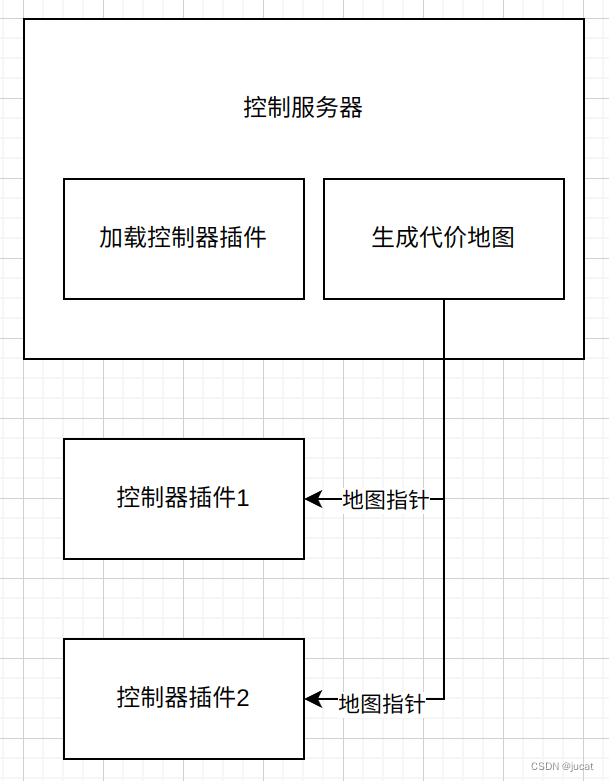
局部规划器的 costmap2d 地图是在服务器端生成,通过指针传递给到控制器插件。在插件内部就可以通过该指针获取到局部代价地图,并在规划路径时候通过读取地图代价来给轨迹评分或者是做碰撞检测。
大概画了张不严谨的示意图
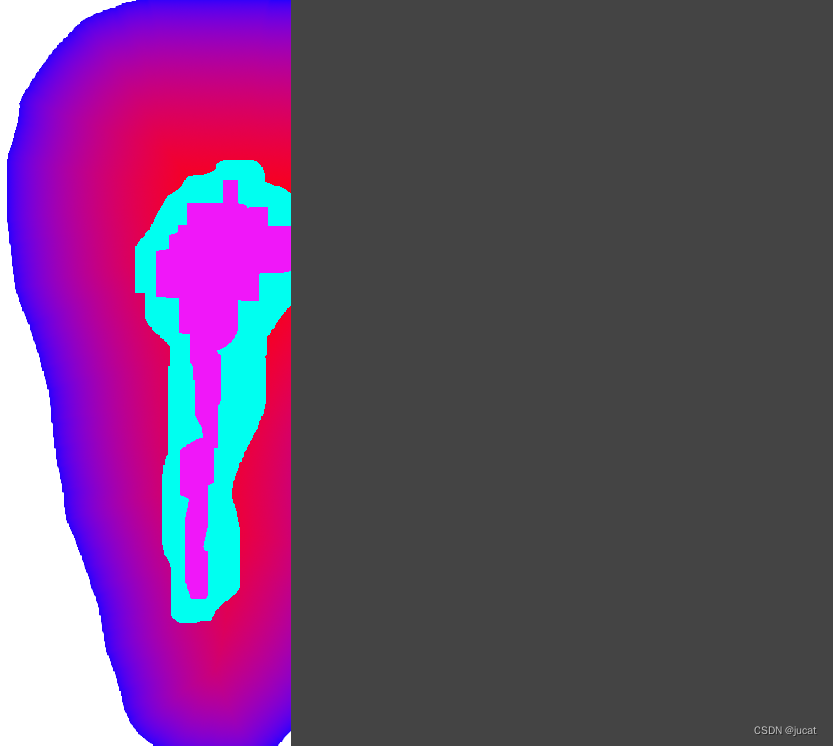
在实际使用过程中,遇到过规划路径时候,通过地图指针查阅地图是没有障碍物的,但是实际情况中地图是有障碍物的,发布出来的地图话题也是有障碍物的异常情况。使用 class Costmap2D 的拷贝函数,也会出现地图拷贝不全的情况,一边有信息,一边为空的情况,大概像下面情况:
分析
通过查看 costmap2d 源码看到 class Costmap2D 有一个接口是提供锁:
typedef boost::recursive_mutex mutex_t;
mutex_t* getMutex()
{
return access_;
}再通过这个 access_ 的锁找到了 class LayeredCostmap 中更新地图的函数
void LayeredCostmap::updateMap(double robot_x, double robot_y, double robot_yaw)
{
// Lock for the remainder of this function, some plugins (e.g. VoxelLayer)
// implement thread unsafe updateBounds() functions.
// 外部通过指针使用 costmap 的时候要记得上锁,最好是上锁拷贝一份地图
boost::unique_lock<Costmap2D::mutex_t> lock(*(costmap_.getMutex()));
// if we're using a rolling buffer costmap... we need to update the origin using the robot's position
// 机器移动局部地图跟着机器移动,这里拷贝了前后地图的重复部分,提高了点效率
if (rolling_window_)
{
double new_origin_x = robot_x - costmap_.getSizeInMetersX() / 2;
double new_origin_y = robot_y - costmap_.getSizeInMetersY() / 2;
costmap_.updateOrigin(new_origin_x, new_origin_y);
}
if (plugins_.size() == 0)
return;
minx_ = miny_ = 1e30;
maxx_ = maxy_ = -1e30;
// 检查各个插件更新的最大边界范围,世界坐标,即地图的 Global_Frame 坐标系
for (vector<boost::shared_ptr<Layer> >::iterator plugin = plugins_.begin(); plugin != plugins_.end();
++plugin)
{
if(!(*plugin)->isEnabled())
continue;
double prev_minx = minx_;
double prev_miny = miny_;
double prev_maxx = maxx_;
double prev_maxy = maxy_;
(*plugin)->updateBounds(robot_x, robot_y, robot_yaw, &minx_, &miny_, &maxx_, &maxy_);
if (minx_ > prev_minx || miny_ > prev_miny || maxx_ < prev_maxx || maxy_ < prev_maxy)
{
ROS_WARN_THROTTLE(1.0, "Illegal bounds change, was [tl: (%f, %f), br: (%f, %f)], but "
"is now [tl: (%f, %f), br: (%f, %f)]. The offending layer is %s",
prev_minx, prev_miny, prev_maxx , prev_maxy,
minx_, miny_, maxx_ , maxy_,
(*plugin)->getName().c_str());
}
}
// 边界的世界坐标转地图数组坐标
int x0, xn, y0, yn;
costmap_.worldToMapEnforceBounds(minx_, miny_, x0, y0);
costmap_.worldToMapEnforceBounds(maxx_, maxy_, xn, yn);
x0 = std::max(0, x0);
xn = std::min(int(costmap_.getSizeInCellsX()), xn + 1);
y0 = std::max(0, y0);
yn = std::min(int(costmap_.getSizeInCellsY()), yn + 1);
ROS_DEBUG("Updating area x: [%d, %d] y: [%d, %d]", x0, xn, y0, yn);
if (xn < x0 || yn < y0)
return;
costmap_.resetMap(x0, y0, xn, yn); // 这里会重置整个更新边界内的地图内容 !
// 各个插件更新边界内的地图代价值
for (vector<boost::shared_ptr<Layer> >::iterator plugin = plugins_.begin(); plugin != plugins_.end();
++plugin)
{
if((*plugin)->isEnabled())
(*plugin)->updateCosts(costmap_, x0, y0, xn, yn);
}
bx0_ = x0;
bxn_ = xn;
by0_ = y0;
byn_ = yn;
initialized_ = true;
}大概结构如下:
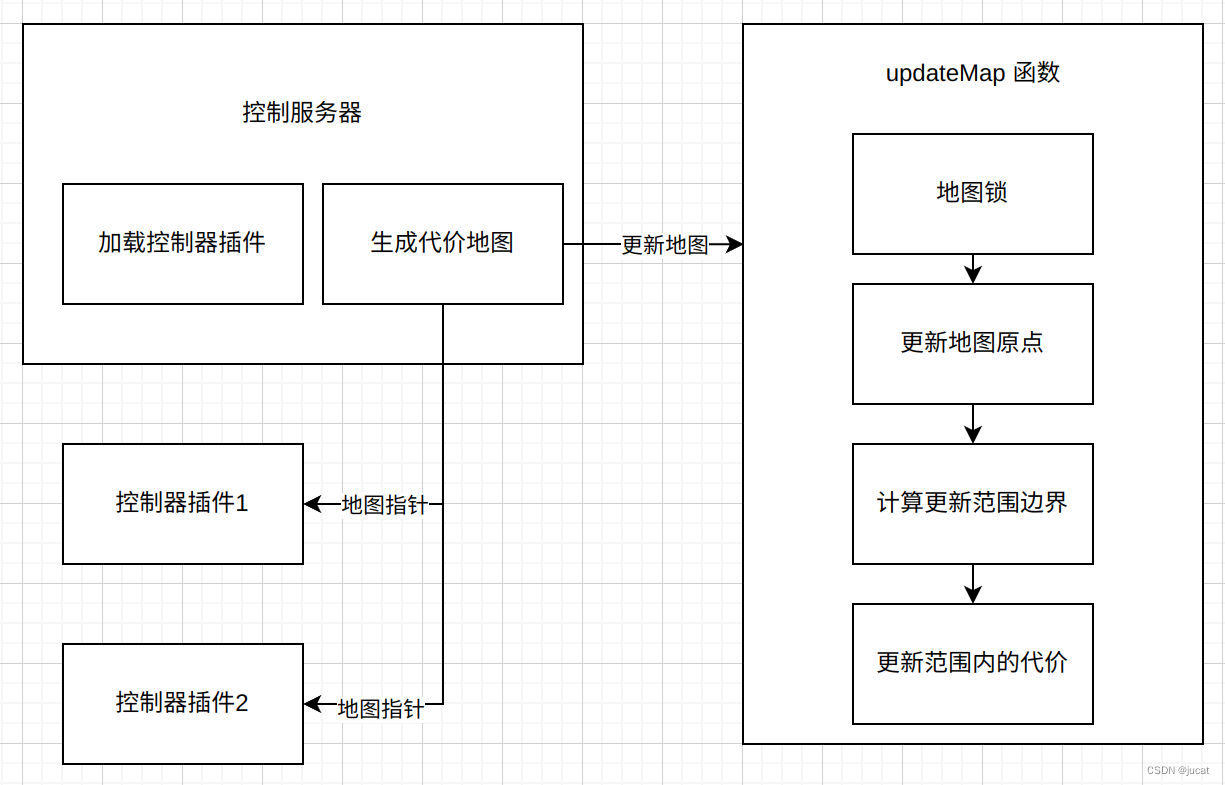
上面拷贝地图不完整的原因可能就是在执行 updateOrigin 函数中,将重叠的部分地图拷贝到移动后的地图中。
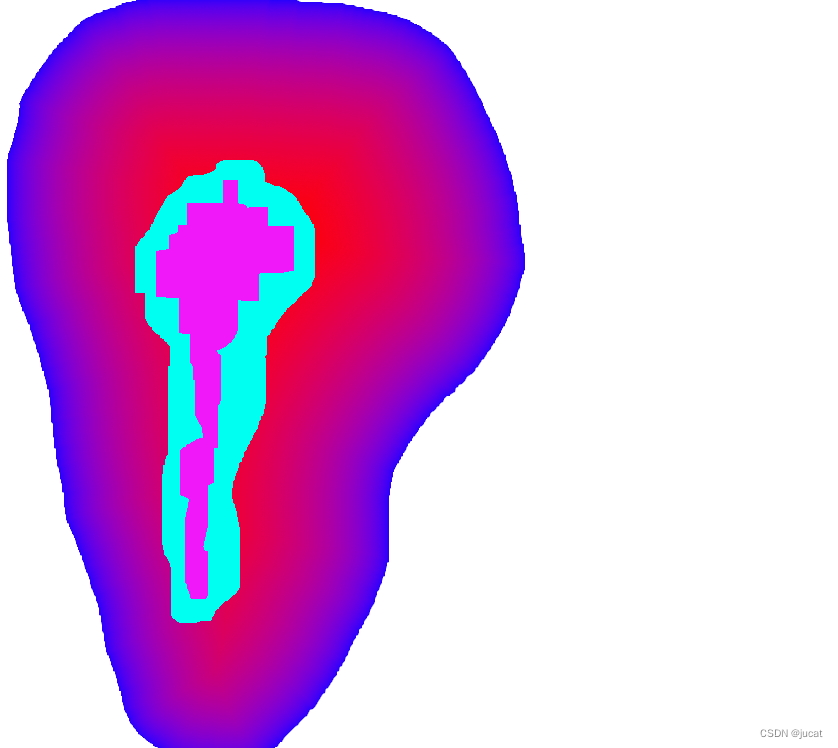
如果是在执行 updateCosts 函数,例如静态地图层,障碍物层已经更新好范围内的代价了,但是膨胀层地图还未执行更新,就可能出现如下情况,地图只有致命障碍物信息没有膨胀信息:
知道导致问题的原因后,我们在外部通过地图指针查阅地图时候只需要上锁查阅代价,或者是上锁拷贝地图,然后再用拷贝后的地图查阅代价即可。















 2427
2427











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









