







 本文详细介绍了数字波束形成的历史发展、阵列天线方向图计算、不同算法演示,以及波束形成原理和宽带与窄带信号处理。还提供了Matlab代码示例,涵盖了自适应相控阵、滤波技术和空间谱估计等内容。
本文详细介绍了数字波束形成的历史发展、阵列天线方向图计算、不同算法演示,以及波束形成原理和宽带与窄带信号处理。还提供了Matlab代码示例,涵盖了自适应相控阵、滤波技术和空间谱估计等内容。
参考文献:
[解疑][TI]TI毫米波雷达系列(三):调频连续波雷达回波信号3DFFT处理原理(测距、测速、测角)_陌生人的天堂的博客-CSDN博客_fft测角
浅谈雷达信号处理中滤波概念及应用_wgm1996的博客-CSDN博客_雷达滤波
语音识别(20201030)——麦克风阵列(采集语音信号)_lies@的博客-CSDN博客_mic阵列
【雷达测角算法(二)】------单脉冲和差波束测角__Karen_的博客-CSDN博客_雷达测角
【雷达】一维和二维自适应波束形成(DBF))DBF附matlab代码_Matlab科研工作室的博客-CSDN博客_dbf matlab
数字波束合成的一些理解_dongguan2689的博客-CSDN博客
一、数字波束形成的历史
数字波束形成的概念由Van Atta于1959年提出,其发展大致可以划分为四个阶段:
阶段1(60年代):主要研究自适应波束控制,如自适应相控阵列天线,自适应波束控制天线;
阶段2(70年代):研究自适应零陷控制,如自适应滤波、自适应调零与旁瓣对消;
阶段3(80年代):主要研究空间谱估计,如最大似然谱估计、最大熵谱估计、特征空间正交谱估计等;
阶段4:应用于有源相控阵雷达系统。
二、阵列天线的方向图

对于M个阵元,间距为d的线阵,方向图函数F(θ)为:
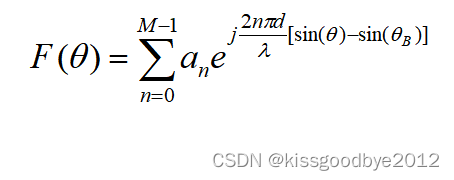
其中:
an------->幅度加权系数,对于均匀线阵,an=a=1;
M-------->阵元个数;
d--------->阵元间距;
λ--------->波长;
θB------->天线波束最大值方向。
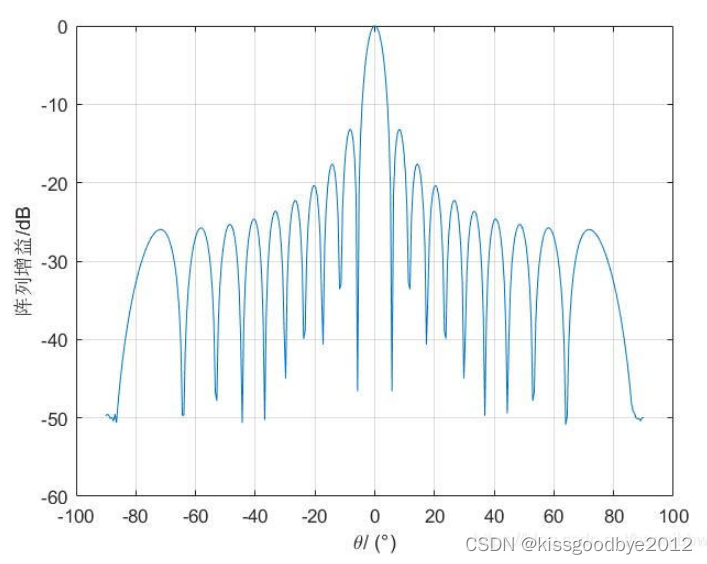
其方向图图例如下:
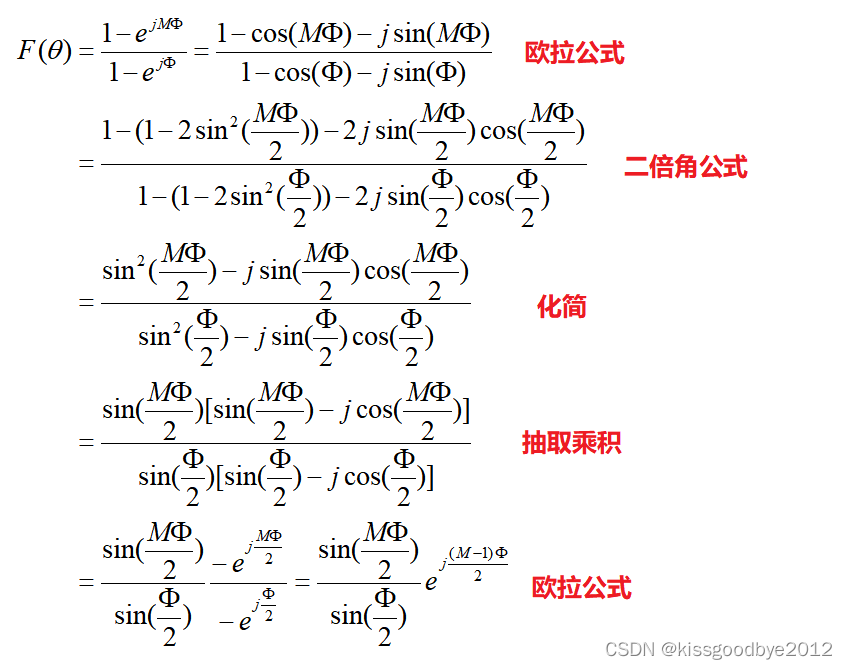
2.1 方向图函数转换
为了简化方向图的表达式,令:
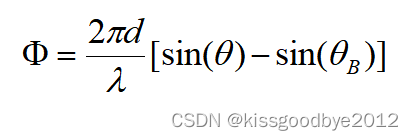
则阵列天线阵方向图可表达为如下的等比数列求和形式(对于均匀线阵,an=a=1):

根据等比数列求和公式,得:
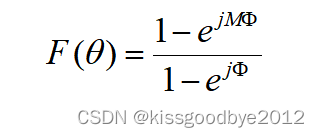
再通过欧拉公式(i*i=-1)和三角函数二倍角公式:


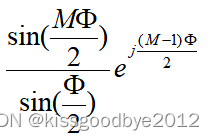
则阵列天线阵方向图函数转换为:
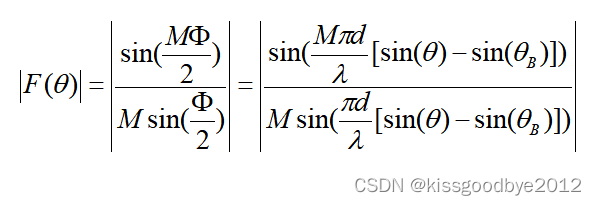
对其取绝对值并归一化
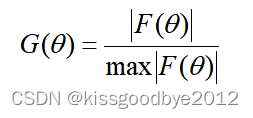
阵列天线阵方向图函数转换为:
然后转换单位为dB,

2.2 Matlab代码
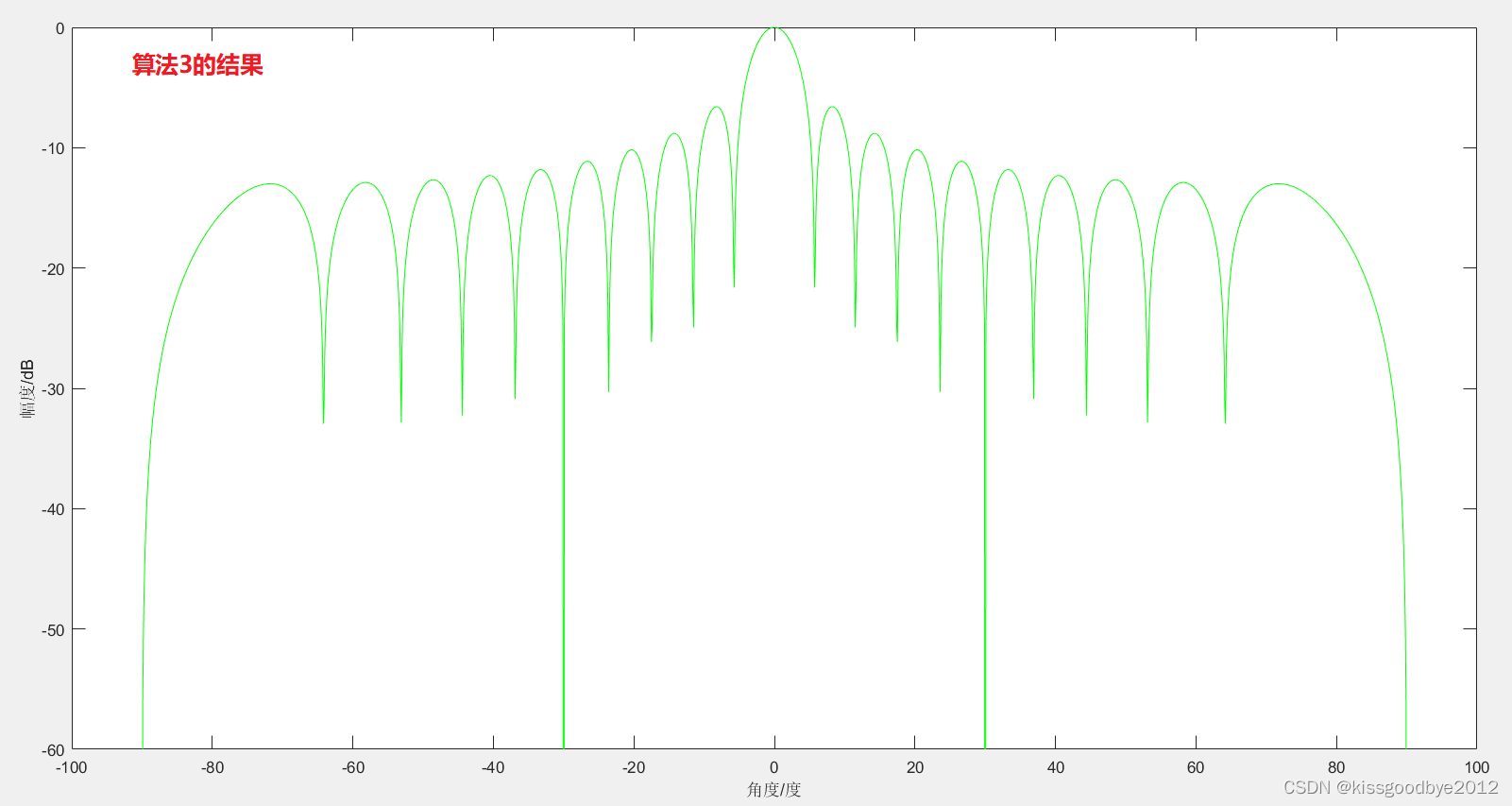
示例:如下3个表达式的关系
clc;clear;close all
%% 算法1
N=20;%阵元个数
lamda=1;%波长,单位m
theta0=0;%单一阵元主波束方向
d=0.5;%阵元间隔,单位m
thetax=-90:0.1:90;
F=zeros(1,1801);
for theta=-90:0.1:90
for j=0:1:(N-1)
F(floor(theta*10+901))=F(floor(theta*10+901))+exp(1i*2*pi/lamda*d*j*(sind(theta)-sind(theta0)));
end
end
G=abs(real(F));
G=G./max(G);
plot(thetax,10*log10(G),'r');
yaxis([-40 0]);
hold on
%% 算法2
N=20;%阵元个数
lamda=1;%波长,单位m
theta0=0;%单一阵元主波束方向
d=0.5;%阵元间隔,单位m
thetax=-90:0.1:90;
F=zeros(1,1801);
for theta=-90:0.1:90
fia=2*pi*d/lamda*sind(theta);
F(floor(theta*10+901))=(sin(N/2*fia)/(sin(fia/2)))*exp(1i*(N-1)*fia/2);
end
G=abs(real(F));
G=G./max(G);
plot(thetax,10*log10(G),'b');
yaxis([-40 0]);
hold on
%% 算法3
N=20;%阵元个数
lamda=1;%波长,单位m
theta0=0;%单一阵元主波束方向
d=0.5;%阵元间隔,单位m
thetax=-90:0.1:90;
F=zeros(1,1801);
for theta=-90:0.1:90
fia=2*pi*d/lamda*sind(theta);%单位,弧度
F(floor(theta*10+901))=(sin(N/2*fia)/(N*sin(fia/2)));
end
G=abs(real(F));
G=G./max(G);
figure
plot(thetax,10*log10(G),'g');
yaxis([-60 0]);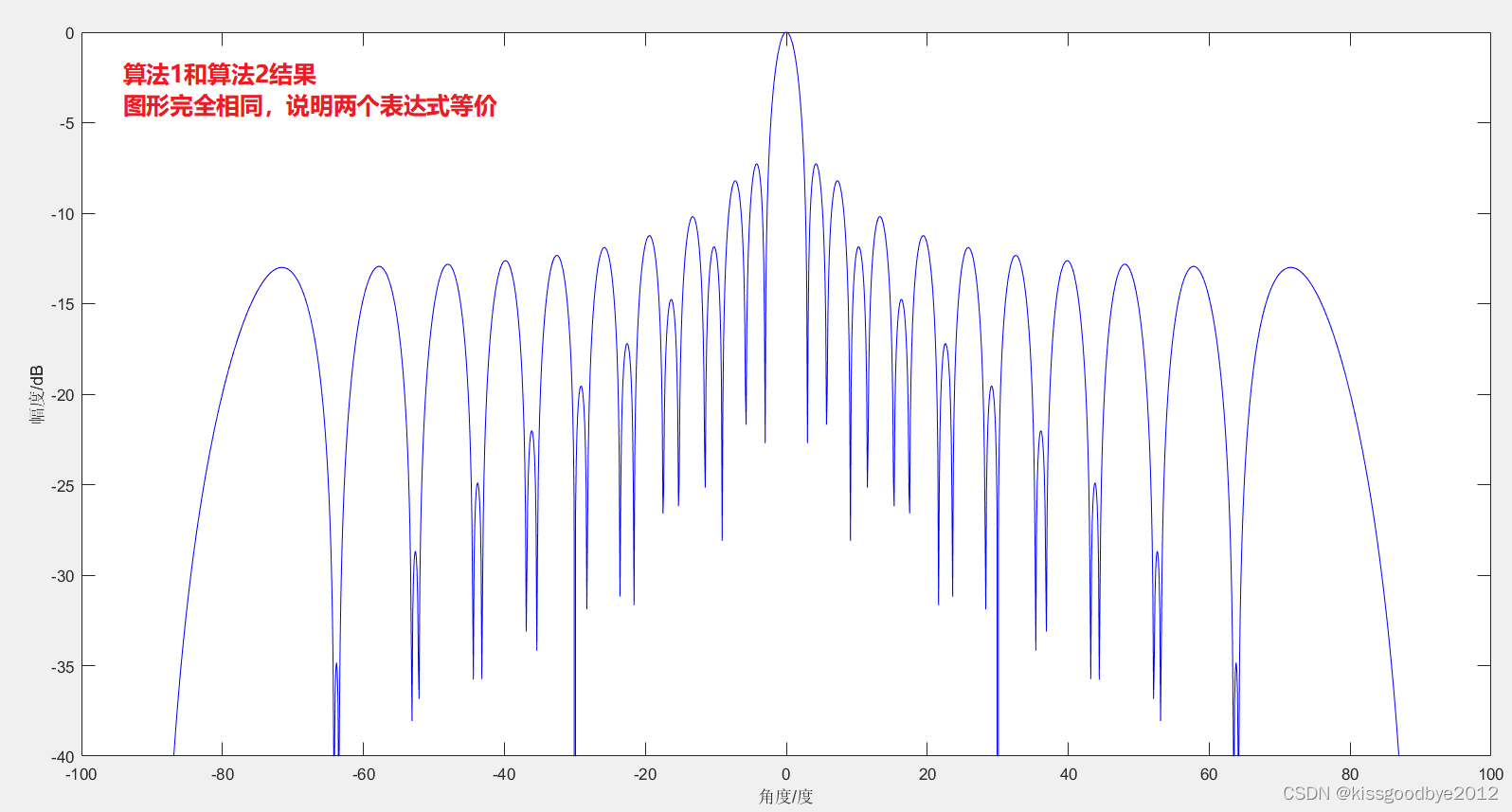
三、波束形成(Beamforming)
波束形成是对空间传感器的采样加权求和,以增强特定方向信号功率、抑止其他方向的干扰信号或提取波场特征参数等为目的的空域滤波。
目的:增强特定方向信号功率、抑止其他方向的干扰信号。
原理:为了让目标波束方向来的信号在接收机处同向叠加,需要补偿不同阵元由于安装间距产生的“空间相位差”。
实现方法:宽带波束形成主要分为时域方法和频域方法,
- 时域方法:对每个支路进行合适的延时,对各阵元上接受信号的时间进行补偿,使信号到达基阵时可以等效为是同一波面同时到达各阵元;
- 频域方法:首先将宽带信号在频域分解为若干个子带,对子带信号进行窄带波束形成后,通过合成得到宽带波束输出。
3.1 窄带信号
为什么波束形成要区分窄带和宽带信号呢?因为频率变化会对波束产生影响,导致波束指向偏移,旁瓣升高等不良后果。
窄带信号的时延可以近似为相移,更一般地情况下需要对各阵元同时进行幅度加权与相移,可以采用一个复数加权。
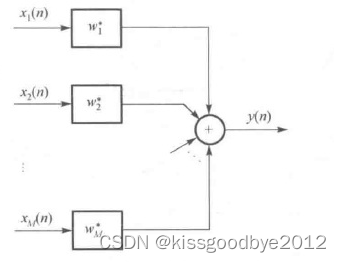
将窄带波束形成器的加权值写成向量的形式
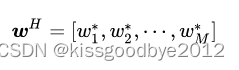
对窄带快拍数据进行加权求和,得到波束形成器的输出快拍为
对于窄带波束形成器的设计问题就是设计加权向量 。
3.2 宽带信号
恒定束宽设计(频域实现方法)本质:设计某种方案让不同的信号频率分量所合成的波束形状,不再随信号频率变化而变化。
恒定束宽设计(频域实现方法):把宽带信号进行子带划分,设计对应不同子带中心频率的加权系数,从而让各个中心频率点上的波束束宽达到恒定。
恒定束宽设计(频域实现方法)评价:各个中心频率点的频率离散,因此这种方法只是一种拟合上的精度达成。要获得更高的精度,必须使得子带划分得更细,频率点间隔更小。
空时域宽带DBF:把宽带信号分割成不同的子带,利用空域FFT、空间重采样技术得到阵列在子带上的不同权系数,然后设计FIR滤波器拟合对应的权系数,最后将各阵元的输出进行求和。
王峰等人设计的分数时延器(一种滤波器,常用一阶FIR滤波器)削弱宽频带对波束形成的影响,从而提高主瓣、副瓣性能;
Krolik等人发表的空间重采样法对FIR滤波器频点分布改进,在频点分布上拟合了大量的虚拟阵元,从而提高精度。


















 6873
6873

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











