







目录
Autoware 纯跟踪控制(pure_pursuit)用到的一些数学方法(如求曲率、求参考曲线上距离小车最最近的点等),觉得很有参考价值。因此做一些总结记录,方便使用的时候寻找。pure_pursuit源码在autoware中的路径是:autoware.ai/src/autoware/core_planning/pure_pursuit。
1.求阿克曼转向角
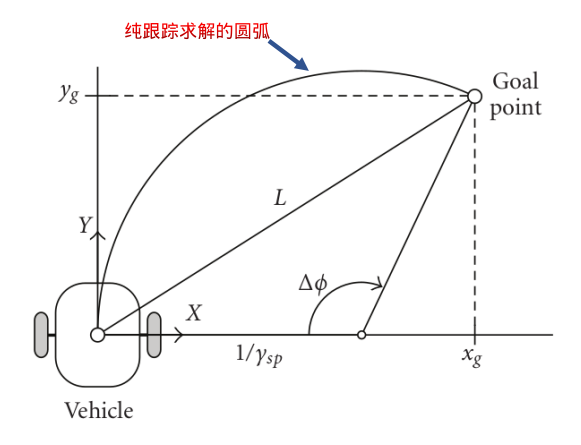
如下图1所示,箭头所指的是纯跟踪求解的圆弧,纯跟踪潜在的假设是小车到达目标点Goal point 是按该圆弧轨迹走的。根据输入参考轨迹、当前位置、速度和L的长度,可以确定轨迹上的Goal point ,进而可以求解出圆弧的曲率(kappa)。
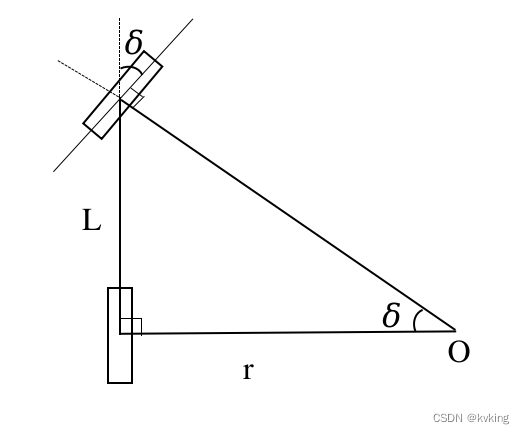
如图2所示,是简化后的阿克曼转向示意图。图中是转向角,r为转弯半径,L是轴距,其中r = 1/kappa。根据几何关系可以知道
因此
源码中对应的代码是:
double convertCurvatureToSteeringAngle(
const double& wheel_base, const double& kappa)
{
return atan(wheel_base * kappa);
}
2.路径虚拟延长
纯跟踪控制是实时跟踪参考轨迹上距离小车L的一个目标点。正常情况图3中A所示,算法可以找到跟踪目标点。当遇到B中的情况时,由于小车距离导航目标点很近,距离小于L,这时就无法找到跟踪目标点,因此算法失效。解决这个问题可以在参考路径末端延长一段距离(如C所示),这样就能保证小车在整个参考路径上都有效。延长的路径只是为保证算法不失效,实际上小车不会走这段路径,因为检测到小车到达导航目标点时,小车已经停下。
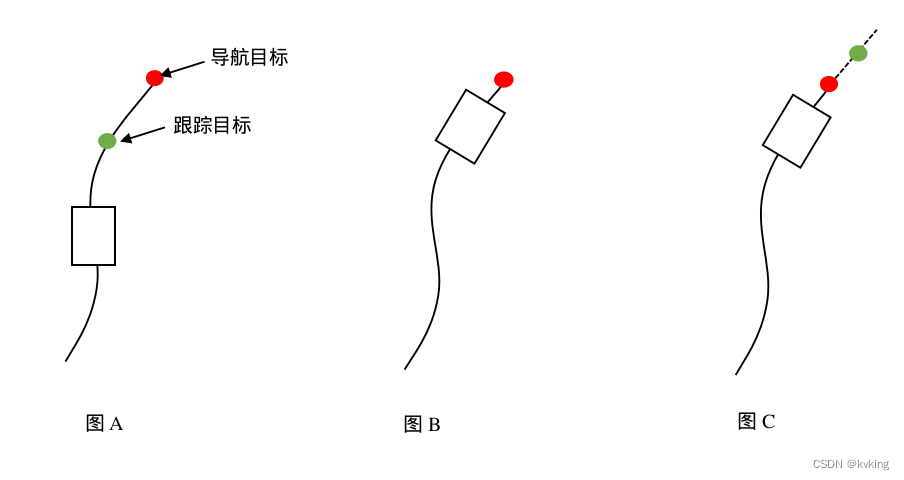
延长的路径以路径终点为起点,方向也是终点的方向。源码中是将坐标系转换到终点,在终点坐标系上进行插入点。终点坐标系中的x轴就是我门要延长的路径的方向,根据插入间距增加x坐标,然后转换回map坐标系,就得到对应的插入点。插值与坐标转换的源码如下:
for (double dist = minimum_lookahead_distance_; dist > 0.0; dist -= interval)
{
virtual_last_point_rlt.x += interval * sgn;
virtual_last_waypoint.pose.pose.position =
calcAbsoluteCoordinate(virtual_last_point_rlt, pn);
lane->waypoints.emplace_back(virtual_last_waypoint);
}// calculation absolute coordinate of point on current_pose frame
geometry_msgs::Point calcAbsoluteCoordinate(geometry_msgs::Point point_msg, geometry_msgs::Pose current_pose)
{
tf::Transform inverse;
tf::poseMsgToTF(current_pose, inverse);
tf::Point p;
pointMsgToTF(point_msg, p);
tf::Point tf_p = inverse * p;
geometry_msgs::Point tf_point_msg;
pointTFToMsg(tf_p, tf_point_msg);
return tf_point_msg;
}3.求曲率
根据纯跟踪曲率公式,当获取小车当前点坐标,和跟踪目标点时就可以求出
。L是两个点的距离。将目标点转换到车体坐标系,就可以求出
.相应的代码如下:
double calcRadius(const geometry_msgs::Point &target, const geometry_msgs::Pose ¤t_pose)
{
constexpr double RADIUS_MAX = 1e9;
const double denominator = 2.0 * transformToRelativeCoordinate2D(target, current_pose).y;
const double numerator = calcDistSquared2D(target, current_pose.position);
if (std::fabs(denominator) > 0)
return numerator / denominator;
else
return RADIUS_MAX;
}














 3101
3101











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









