







文章目录
文章翻译自Quaternion and rotations,作者Yan-Bin Jia
译者刚入门,水平有限,仅供参考
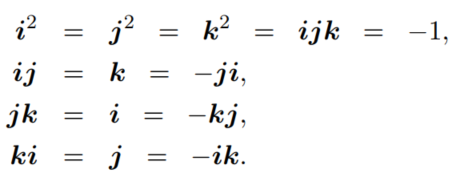
1. Introduction
2. Quaternion Algebra
本节是四元数的基本性质,可以参考这个链接中的内容,讲的非常详细:https://www.qiujiawei.com/understanding-quaternions/
四元数集,再加上定义在其上的加法和乘法,共同形成了一个不可交换环(non-commutative ring)(这一部分并不需要特别的理解)。
R
3
R^3
R3空间中的标准正交基为:

四元数q,被定义成如下形式,由一个数
q
0
q_0
q0和一个向量
q
\bold{q}
q,组成:

2.1 加法和乘法
加法是逐项进行的,考虑有四元数p:

与上文四元数q相加,得到:

乘法要满足如下的性质:
两个四元数相乘可得:

利用向量点乘和向量叉乘的性质,可以化简得:

式中:

example 1:
假设有如下两个四元数:
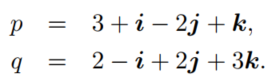
取出向量如下:

计算向量的点乘和叉乘如下:
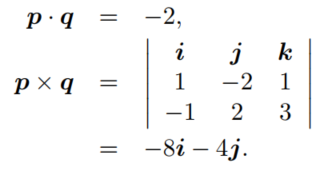
四元数乘积表达如下:

可以看到四元数集对加法和乘法是封闭的
2.2 complex conjugate,Norm and Inverse
假设一个四元数q:

其复共轭为q*:

根据上述定义可以得到如下性质:

以及性质:
一个四元数的模为:
模为1的四元数为单位四元数。模有如下性质:
四元数的逆为:
求逆过程证明:

3. Quaternion Rotation Operator
首先定义一个vector,
v
∈
R
3
\bold{v} \in R^3
v∈R3,为实部是0的纯四元数。
紧接着定义一个单位四元数:
满足:
则一定有:
定义单位向量:
则有:

定义一个对于空间向量v的操作:

注意这里的证明,要用到如下性质:

证明:
L q ( v ) = q v q ∗ = ( q 0 + q ) v ( q 0 − q ) = ( q 0 v + q v ) ( q 0 − q ) = q 0 2 v + q 0 q v − q 0 v q − q v q = q 0 2 v + q 0 ( − q ⋅ v + q × v ) − q 0 ( − v ⋅ q + v × q ) − q v q = q 0 2 v + 2 q 0 ( q × v ) − ( − q ⋅ v + q × v ) q = q 0 2 v + 2 q 0 ( q × v ) − ( − q × v ⋅ q − ( q ⋅ v ) q + q × v × q ) = q 0 2 v + 2 q 0 ( q × v ) + 0 + ( q ⋅ v ) q + q ( q ⋅ v ) − v ( ∣ ∣ q ∣ ∣ 2 ) = ( q 0 2 − ∣ ∣ q ∣ ∣ 2 ) v + 2 ( q ⋅ v ) q + 2 q 0 ( q × v ) \begin{aligned} L_q (\pmb{v}) &=q \pmb{v} q^* \\ &= (q_0+\pmb{q}) \pmb{v} (q_0-\pmb{q}) \\ &= (q_0 \pmb{v} + \pmb{qv})(q_0-\pmb{q}) \\ &= q_0^2 \pmb{v}+q_0 \pmb{qv} - q_0 \pmb{vq} - \pmb{qvq} \\ &= q_0^2 \pmb{v} +q_0(-\pmb{q \cdot v} + \pmb{q \times v}) -q_0(-\pmb{v \cdot q} +\pmb{v \times q}) - \pmb{qvq} \\ &= q^2_0\pmb{v}+2q_0(\pmb{q\times v})-(-\pmb{q \cdot v} + \pmb{q \times v}) \pmb{q} \\ &=q^2_0\pmb{v}+2q_0(\pmb{q\times v})-( -\pmb{q \times v \cdot q}-(\pmb{q \cdot v})\pmb{q}+\pmb{q \times v \times q }) \\ &= q^2_0\pmb{v}+2q_0(\pmb{q\times v}) + 0 + (\pmb{q \cdot v})\pmb{q} + \pmb{q}(\pmb{q \cdot v}) - \pmb{v}(||\pmb{q}||^2) \\ &=(q^2_0-||\pmb{q}||^2)\pmb{v}+2(\pmb{q \cdot v})\pmb{q}+2q_0(\pmb{q \times v}) \end{aligned} Lq(vvv)=qvvvq∗=(q0+qqq)vvv(q0−qqq)=(q0vvv+qvqvqv)(q0−qqq)=q02vvv+q0qvqvqv−q0vqvqvq−qvqqvqqvq=q02vvv+q0(−q⋅vq⋅vq⋅v+q×vq×vq×v)−q0(−v⋅qv⋅qv⋅q+v×qv×qv×q)−qvqqvqqvq=q02vvv+2q0(q×vq×vq×v)−(−q⋅vq⋅vq⋅v+q×vq×vq×v)qqq=q02vvv+2q0(q×vq×vq×v)−(−q×v⋅qq×v⋅qq×v⋅q−(q⋅vq⋅vq⋅v)qqq+q×v×qq×v×qq×v×q)=q02vvv+2q0(q×vq×vq×v)+0+(q⋅vq⋅vq⋅v)qqq+qqq(q⋅vq⋅vq⋅v)−vvv(∣∣qqq∣∣2)=(q02−∣∣qqq∣∣2)vvv+2(q⋅vq⋅vq⋅v)qqq+2q0(q×vq×vq×v)
旋转变换不会改变向量v的长度:
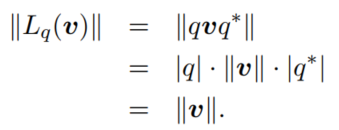
对于沿着旋转轴的向量v进行旋转不会改变方向:
旋转变换是个线性变换:

3.1 定理1
对于任意的单位四元数:
对于任意向量
v
∈
R
3
v \in R^3
v∈R3进行旋转变换:
相当于将向量v,绕u轴,旋转
θ
\theta
θ角度。
证明:TBDD
3.2 定理2
和上面定理1相反,对于任何一个单位四元数:

如下操作,是将向量v绕u轴旋转
−
θ
-\theta
−θ角度:

4. Quaternion operator sequence
四元数的序列化操作,也就是先绕一个轴旋转一定角度,再绕另一个轴旋转一定角度。
5. 应用
5.1 3D shape registration
已知一堆点
(
p
0
,
p
1
,
.
.
.
,
p
n
)
(\pmb{p_0,p_1,...,p_n})
(p0,p1,...,pnp0,p1,...,pnp0,p1,...,pn),另一堆点
(
q
0
,
q
1
,
.
.
.
,
q
n
)
(\pmb{q_0,q_1,...,q_n})
(q0,q1,...,qnq0,q1,...,qnq0,q1,...,qn),这里应该是知道了对应关系了,求一个变换R和b满足:
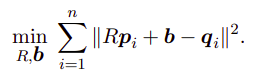
如下图所示:

首先计算点云的重心:
将重心归零:
显然有:
将目标函数重新表达:

上面将R和b进行了分离,可以分开求解,可见:
求R:
上目标函数重写:
上式可见,第一项与R无关,只考虑第二项:
用四元数表示:
应用四元数求积过程:

将点表达成矩阵形式:

进行改写:

中间部分的矩阵M是对称的:
利用特征值特征向量的关系,这里和之前一片文章推倒特征值特征向量及SVD的过程基本一致:
















 3944
3944











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









