







公式大全
区分坐标系的坐标式与分量式
对于一个矢量
A
⃗
=
(
x
,
y
,
z
)
\vec{A}=(x,y,z)
A=(x,y,z) ,可以写成
A
⃗
=
x
e
1
⃗
+
y
e
2
⃗
+
z
e
3
⃗
\vec{A}=x\vec{e_1}+y\vec{e_2}+z\vec{e_3}
A=xe1+ye2+ze3
其中
e
1
⃗
,
e
2
⃗
,
e
3
⃗
\vec{e_1}, \vec{e_2}, \vec{e_3}
e1,e2,e3 是相互正交的单位矢量,是这个空间的矢量的一组基
对于空间直角坐标系,其坐标表达式
(
x
,
y
,
z
)
(x,y,z)
(x,y,z) 就是其在单位矢量上的分量式
(
A
x
,
A
y
,
A
z
)
(A_x, A_y, A_z)
(Ax,Ay,Az),
其中
A
x
=
x
,
A
y
=
y
,
A
z
=
z
A_x=x, A_y=y, A_z=z
Ax=x,Ay=y,Az=z
对于柱坐标系,其坐标表达式
(
ρ
,
ϕ
,
z
)
(\rho, \phi, z)
(ρ,ϕ,z) 并不是其在单位矢量上的分量式
(
A
ρ
,
A
ϕ
,
A
z
)
(A_\rho, A_\phi, A_z)
(Aρ,Aϕ,Az) ,
不能用坐标表达式进行点乘叉乘
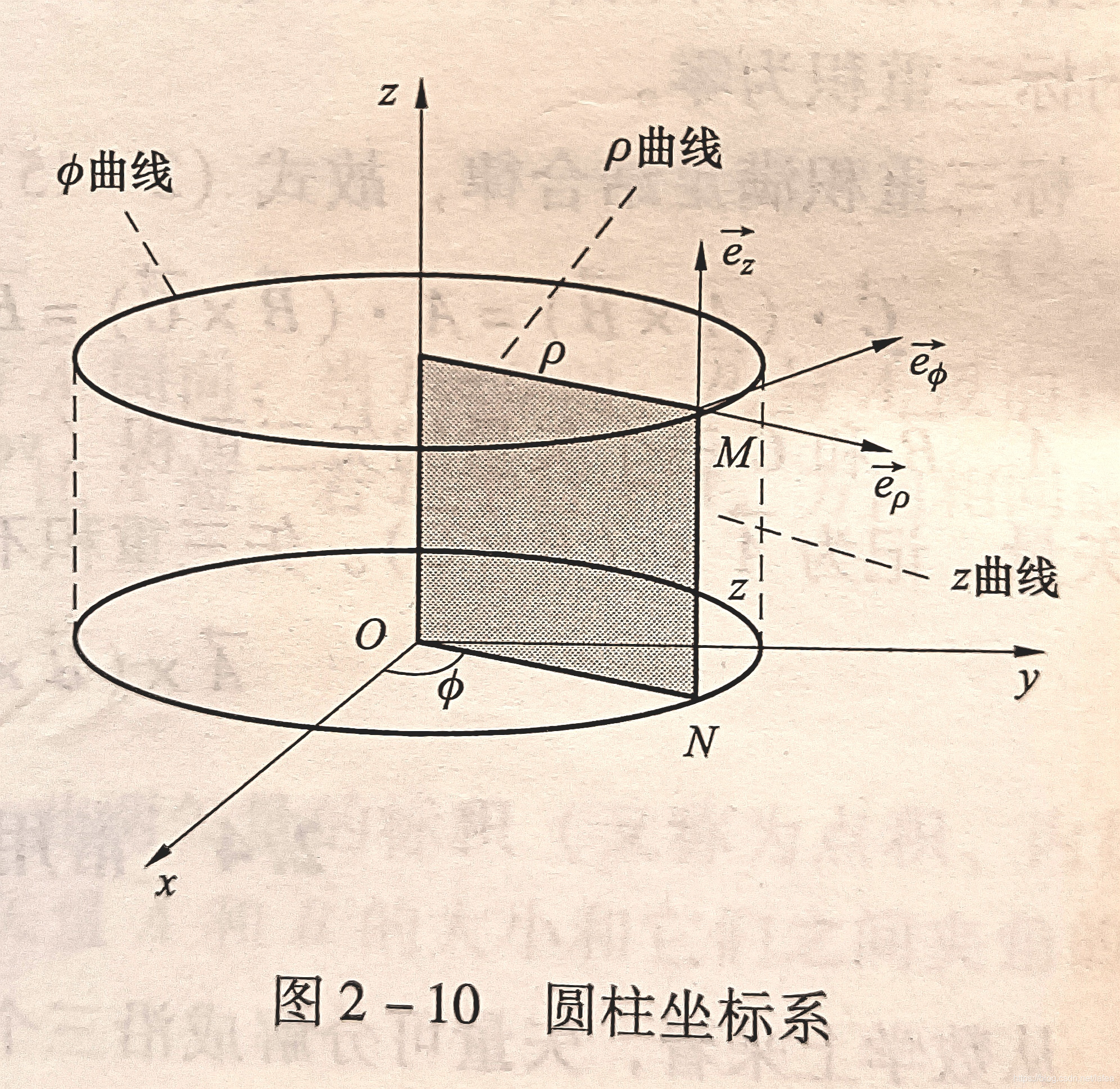
可以看到,柱坐标系的单位矢量仍然是正交的
(
ρ
,
ϕ
,
z
)
≠
(
A
ρ
,
A
ϕ
,
A
z
)
(\rho, \phi, z)\ne(A_\rho, A_\phi, A_z)
(ρ,ϕ,z)=(Aρ,Aϕ,Az)
对于求坐标系,其坐标表达式
(
r
,
θ
,
ϕ
)
(r, \theta, \phi)
(r,θ,ϕ) 并不是其在单位矢量上的分量式
(
A
r
,
A
θ
,
A
ϕ
)
(A_r, A_\theta, A_\phi)
(Ar,Aθ,Aϕ) ,
不能用坐标表达式进行点乘叉乘
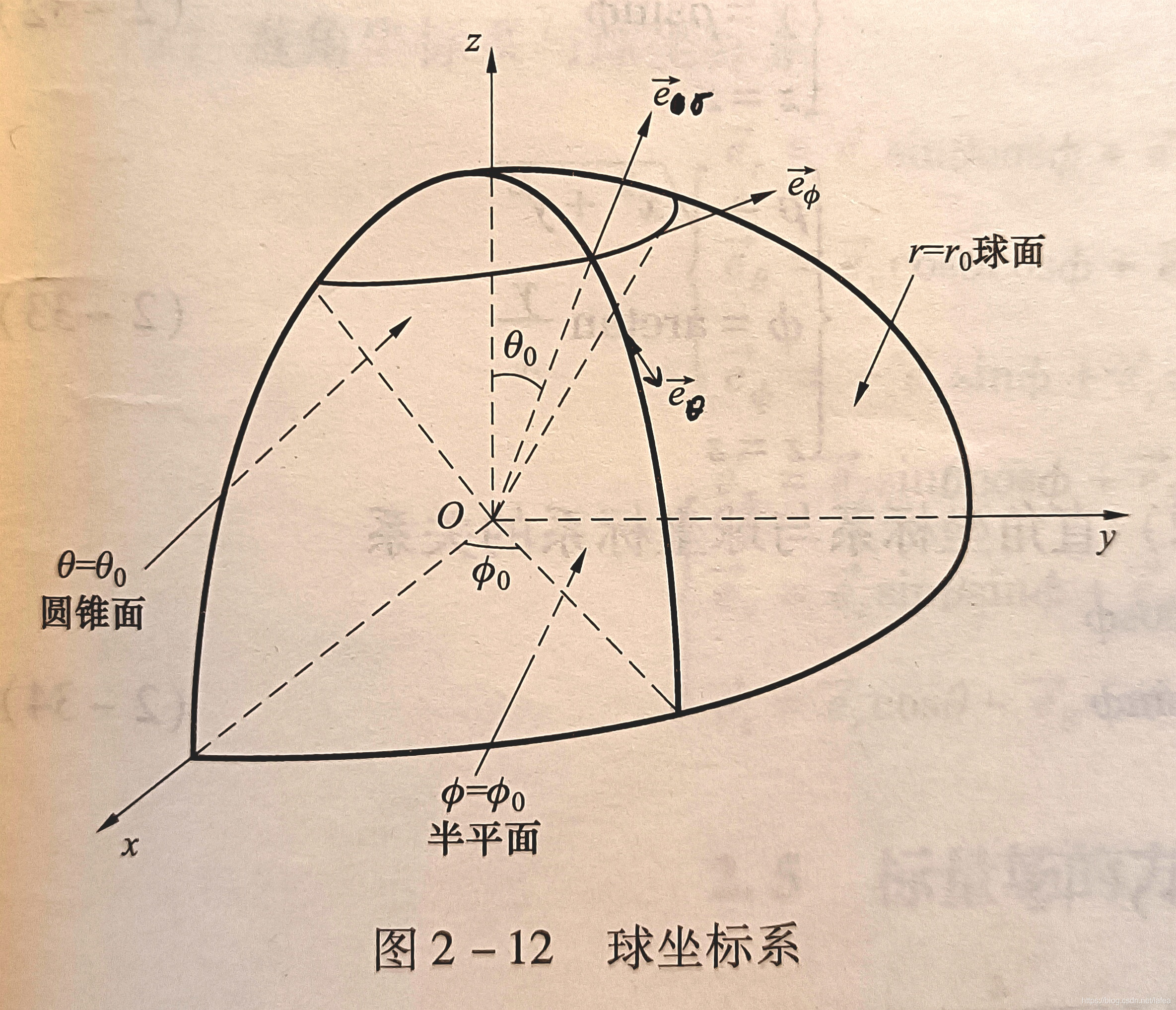
可以看到,球坐标系的单位矢量仍然是正交的
(
r
,
θ
,
ϕ
)
≠
(
A
r
,
A
θ
,
A
ϕ
)
(r, \theta, \phi)\ne(A_r, A_\theta, A_\phi)
(r,θ,ϕ)=(Ar,Aθ,Aϕ)
单位径矢的公式
直 角 坐 标 系 : e r ⃗ = ( x r , y r , z r ) 柱 坐 标 系 : e r ⃗ = ( ρ r , 0 , z r ) 球 坐 标 系 : e r ⃗ = ( 1 , 0 , 0 ) 通 过 三 系 转 换 计 算 , 注 意 以 上 都 是 分 量 式 而 不 是 坐 标 直角坐标系:\vec{e_r}=(\frac x r, \frac y r, \frac z r)\\\ \\ 柱坐标系:\vec{e_r}=(\frac \rho r, 0, \frac z r)\\\ \\ 球坐标系:\vec{e_r}=(1,0,0)\\\ \\ 通过三系转换计算,注意以上都是分量式而不是坐标 直角坐标系:er=(rx,ry,rz) 柱坐标系:er=(rρ,0,rz) 球坐标系:er=(1,0,0) 通过三系转换计算,注意以上都是分量式而不是坐标
区分场与势的概念
势和场是两个概念,通过矢量场可以定义出场的势
当0势能面确定后,可以定义出势能场(标量场)
对保守(无旋)的矢量场,可以定义出其势能场
径矢的公式
∇ ⋅ ( a ⃗ × r ⃗ ) = 0 ∇ ⋅ ( r ⃗ × A ⃗ ( r ) ) = 0 ∇ ( 1 r ) = − r ⃗ r 3 \nabla \cdot(\vec{a} \times \vec{r})=0\\\ \\ \nabla \cdot(\vec{r} \times \vec{A}(r))=0\\\ \\ \nabla(\frac 1 { r})=-\frac{\vec{r}}{r^3} ∇⋅(a×r)=0 ∇⋅(r×A(r))=0 ∇(r1)=−r3r
一些屁话
无旋即保守,无散即无源

















 7164
7164

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









