









WHAT:
1. 按测试环境分类(仿真环境,真实环境)
1.1 其中仿真环境下的测试又可分为:
- MIL,Model in the Loop:模型在环测试;
- SIL,Software in the Loop:软件在环测试;
- PIL,Processor in the Loop:处理器在环测试;
- HIL,Hardware in the Loop:硬件在环测试。
2. 按自动驾驶系统功能模块划分:
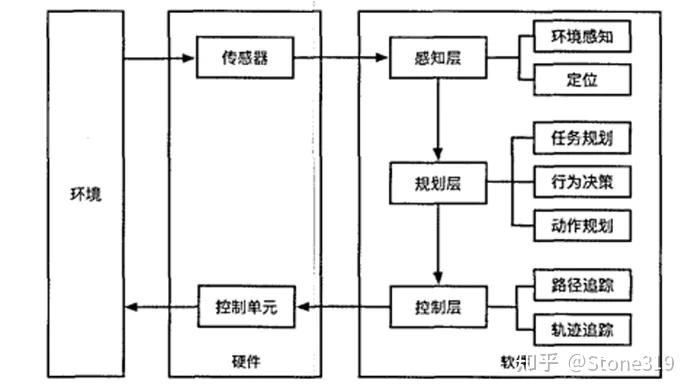
图示:自动驾驶系统基本框架 ( 图片来自:自动驾驶技术概述)
- 感知模块(数据仿真),
- 控制模块(感知结果的仿真,测试控制器),
- 执行模块(测试控制系统,人机交互单元,其他分布式系统,如自动紧急制动,紧急辅助),
- 驾驶员在环,
- 车辆在环
3. 按开发与集成的流程:
将整体系统划分成模块,按模块的成熟度及时间进度安排,分别
- 单元测试,
- 并持续集成测试。
















 6326
6326











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











