









论文地址: [2502.16976] Task-Oriented 6-DoF Grasp Pose Detection in Clutters
研究背景
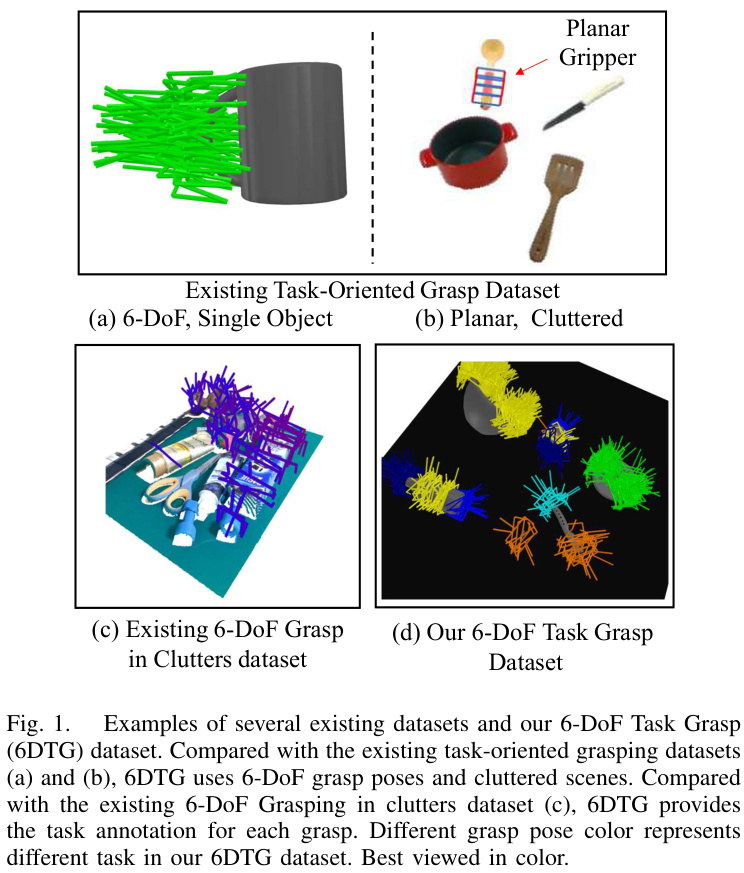
- 研究问题 :这篇文章要解决的问题是任务导向的 6自由度抓取姿态检测(TO6DGC),即在杂乱的环境中检测出能够完成特定任务的 6自由度抓取姿态。与现有的任务导向抓取姿态检测方法相比,该问题更接近人类的抓取行为,更具实用性和通用性。
- 研究难点 :该问题的研究难点包括:如何在杂乱的环境中检测出多个对象的稳定抓取姿态,并且每个抓取姿态需要与特定任务相关联;现有的方法通常受限于低自由度夹爪或非杂乱环境,难以适用于现实生活中的辅助机器人。
- 相关工作 :该问题的研究相关工作包括:6 自由度抓取姿态检测在杂乱环境中的方法,这些方法主要关注如何稳定地抓取对象,而没有考虑每个抓取姿态的任务关联性;任务导向抓取姿态检测的方法,这些方法主要关注单对象任务,且通常受限于低自由度夹爪或非杂乱环境。
研究方法
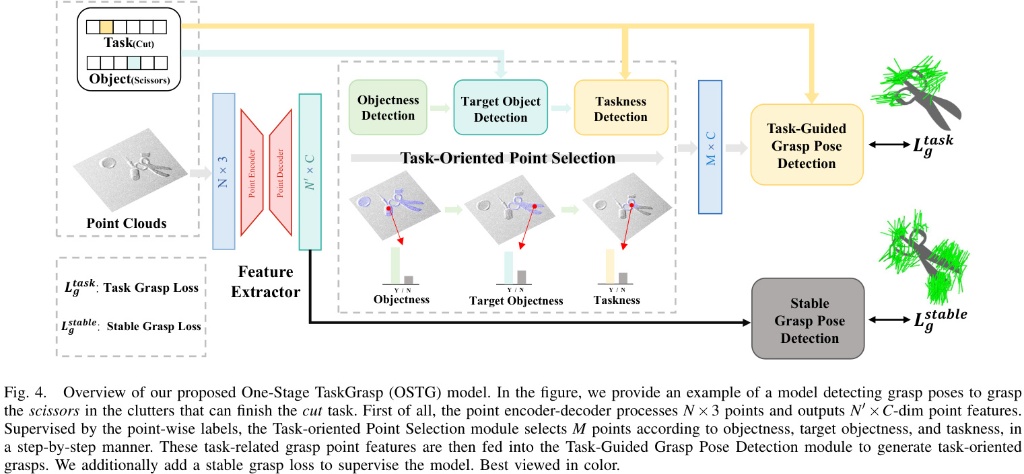
这篇论文提出了一种名为 One-Stage TaskGrasp(OSTG)的方法,用于解决任务导向的 6自由度抓取姿态检测问题。具体来说,
-
数据集构建 :首先,构建了一个大规模的 6自由度任务导向抓取数据集(6DTG),包含 4391 个杂乱场景和超过 200 万个 6自由度抓取姿态。每个抓取姿态都标注了特定的任务,涉及 6个任务和 198 个对象。
-
任务导向点选择 :OSTG 方法首先采用任务导向点选择模块,通过逐步筛选出能够完成特定任务的抓取点。具体步骤包括:根据对象性(是否属于对象)、目标对象性(是否属于目标对象)和任务性(目标对象中的点是否适合特定任务)进行筛选。
-
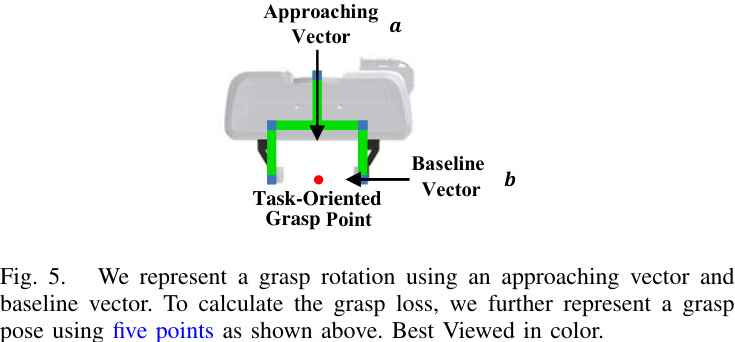
任务导向抓取姿态检测 :在选定的任务导向点基础上,提出了一种任务引导的抓取姿态检测模块,直接检测任务导向的 6自由度抓取旋转。该模块通过任务嵌入和点特征的拼接,预测抓取旋转向量和抓取置信度。
-
训练损失 :整体训练损失分为点选择损失和抓取损失两部分。点选择损失通过多步筛选过程中的每个步骤的标签进行监督,抓取损失通过将预测的抓取姿态与真实抓取姿态进行比较来计算。
实验设计
- 数据集 :使用了新构建的 6DTG 数据集,包含 16042 个训练三元组和 6841 个测试三元组。每个三元组包含点云、对象类别和任务类别。
- 评估指标 :评估方法包括覆盖率和成功率。覆盖率仅要求模型输出能够抓取任务导向点的抓取姿态,而成功率则考虑每个任务导向点抓取姿态的质量。
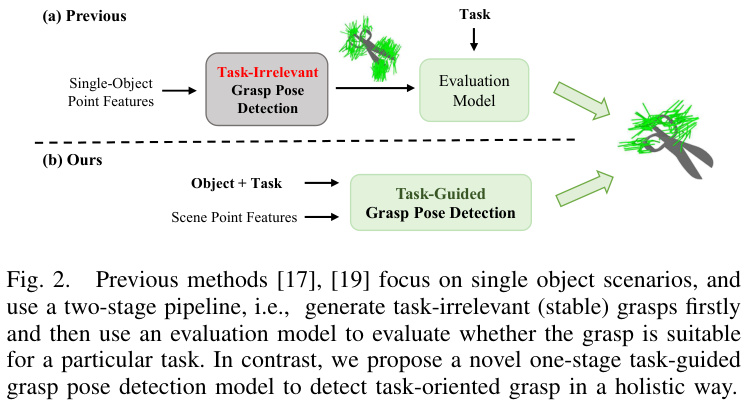
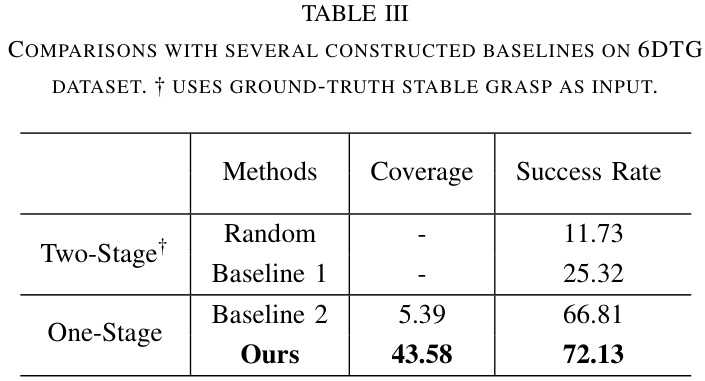
- 基线方法 :设计了两种基线方法进行比较:两阶段基线方法和单阶段基线方法。两阶段基线方法首先生成所有稳定抓取姿态,然后评估每个抓取姿态是否适合特定任务;单阶段基线方法使用 ContactGraspnet 模型,通过添加任务和对象的独热编码来预测任务导向抓取姿态。
结果与分析
-
与基线方法的比较 :在 6DTG 数据集上的实验结果表明,OSTG 方法在覆盖率和成功率上均显著优于所有基线方法。两阶段基线方法在多对象场景中表现不佳,而单阶段基线方法在任务导向抓取姿态检测上有所改进,但仍然不如 OSTG 方法。
-
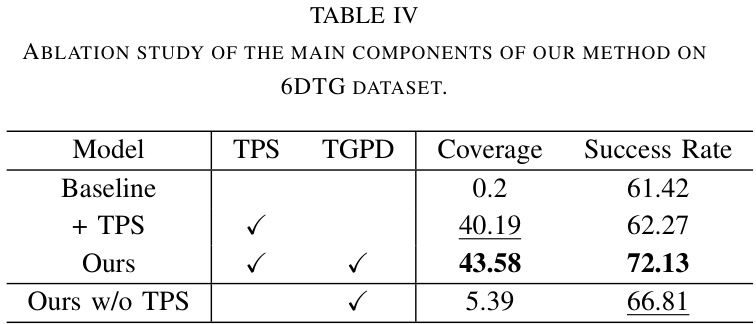
消融实验 :消融实验表明,任务导向点选择模块和任务引导抓取姿态检测模块对模型性能的提升起到了关键作用。去除任务导向点选择模块后,模型的覆盖率和成功率均有所下降,但仍优于单阶段基线方法。
-
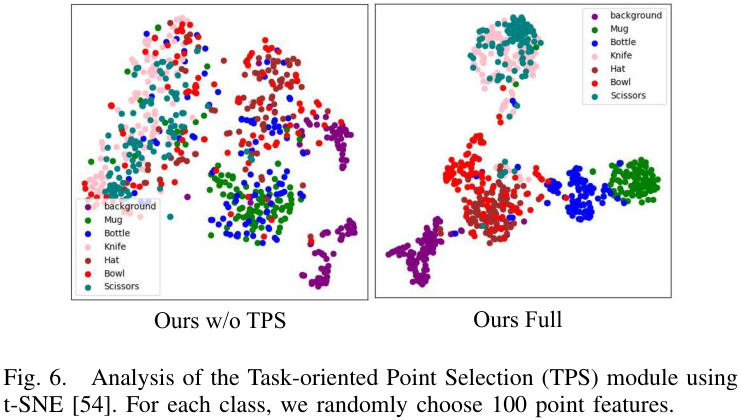
定性分析 :通过 t-SNE 分析,验证了任务导向点选择模块的有效性。去除任务导向点选择模块后,点特征在二维空间中混合,而使用完整模型的点特征则按对象标签分组,表明模型在点特征空间中学习到了区分不同对象的区域。
总体结论
这篇论文提出了一种名为 One-Stage TaskGrasp(OSTG)的方法,用于解决任务导向的 6自由度抓取姿态检测问题。通过构建大规模的 6DTG 数据集和提出任务导向点选择及任务引导抓取姿态检测模块,OSTG 方法在多个指标上显著优于现有方法。实验证明了 OSTG 方法在杂乱环境中的有效性和实用性,为未来的研究提供了便利。

















 943
943

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









