








 超级会员免费看
超级会员免费看

全局对齐空间分布 (GASD) 描述符
本文档介绍用于高效对象识别和姿势估计的全局对齐空间分布 ([GASD]) 全局描述符。
GASD 基于对表示对象实例的整个点云的参考系的估计,该参考系用于将其与规范坐标系对齐。之后,根据对齐点云的 3D 点的空间分布方式计算对齐点云的描述符。这样的描述符也可以随着整个对齐点云的颜色分布而扩展。匹配点云的全局对齐变换用于计算目标姿势。有关更多信息,请参阅 [GASD]。
理论入门
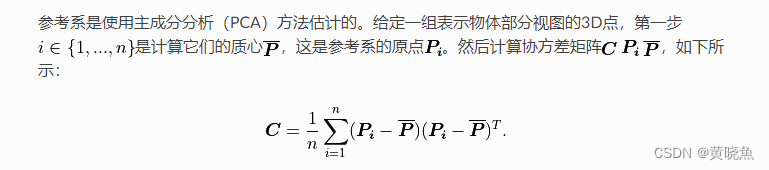
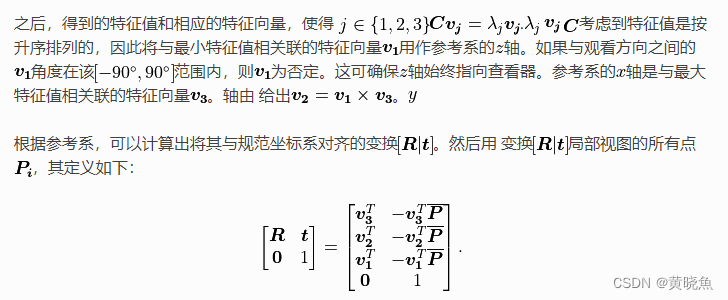
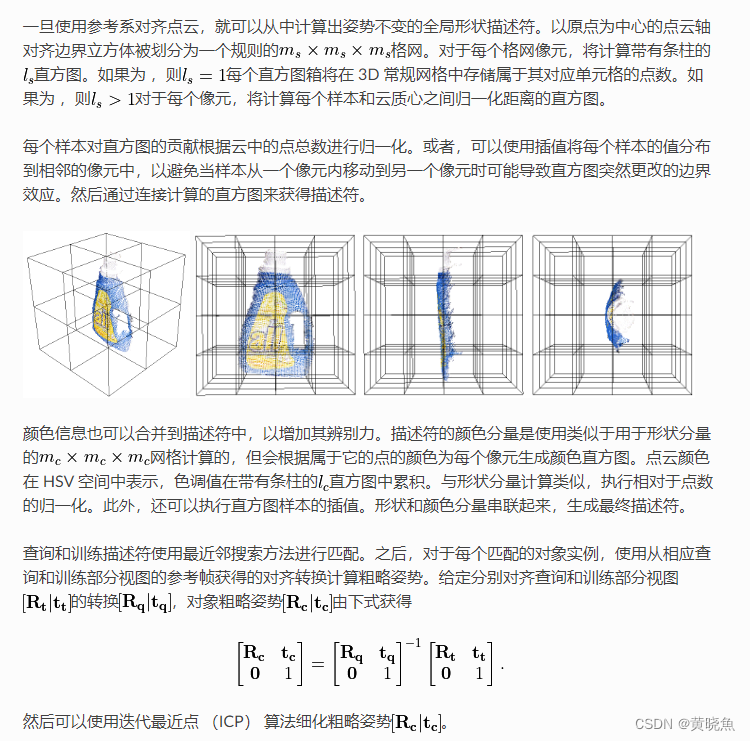
全局对齐空间分布(或 GASD)全局描述方法将表示给定对象的部分视图的 3D 点云作为输入。第一步是估计点云的参考系,这允许计算将其与规范坐标系对齐的变换,使描述符姿势不变。对齐后,根据 3D 点的空间分布计算点云的形状描述符。还可以考虑沿点云的颜色分布,以获得具有更高判别力的形状和颜色描述符。然后通过匹配部分视图的查询和训练描述符来执行对象识别。每个已识别对象的姿势也是根据匹配查询和训练部分视图的对齐转换计算的。
 </
</

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 179
179











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











