







 本文详细介绍了如何使用Python格式的ROS 2 Launch文件启动和配置多个节点,包括创建launch文件、导入模块、定义节点、配置参数、编译工作空间以及运行launch文件的步骤,展示了Python格式在灵活性和复杂配置上的优势。
本文详细介绍了如何使用Python格式的ROS 2 Launch文件启动和配置多个节点,包括创建launch文件、导入模块、定义节点、配置参数、编译工作空间以及运行launch文件的步骤,展示了Python格式在灵活性和复杂配置上的优势。
本文采用 python 格式编辑 Launch。
在ROS 2中,launch文件用于启动和配置多个节点以及设置运行参数。相比于XML和YAML格式,Python格式的launch文件更加灵活,因为它可以利用Python的函数库和特性。这使得Python格式的launch文件可以实现更加复杂和动态的配置。
以下是一个使用Python格式编写的ROS 2 launch文件的示例,以及如何在ROS 2中使用它来启动多个节点和设置参数。
示例:使用Python格式的ROS 2 Launch文件
目录结构
首先,确保你的ROS 2工作空间包含一个用于存放launch文件的目录。你的工作空间目录结构可能如下所示:
cd ~/ros2_ws/src/topic_pkg
mkdir launch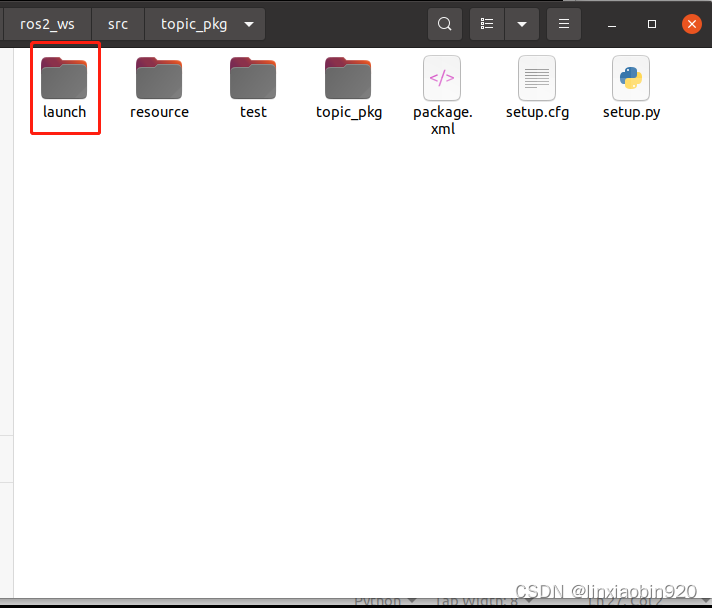
ros2_ws/
├── src/
│ └── my_package/
│ ├── launch/
│ │ └── my_launch_file.py
│ ├── my_package/
│ └── setup.py
└── install/创建Launch文件
在my_package/launch/目录下创建一个名为my_launch_file.py的文件,内容如下:
# my_package/laun 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 6923
6923

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









